基于RRT的机器人自主探索建图
一、方法讲解:
本项目分为三个部分:机器人周围一定范围内基于RRT的全局检测,
根据上一步检测的未知区域点执行sklearn.cluster.MeanShift聚类,获取聚类中心;
根据聚类中心计算各点增益,取最大增益点为目标,调用move_base规划路径和控制机器人行走。
二、各部分详解:
2.1 基于RRT的全局检测:检测未知区域点并发布
以机器人为中心,激光采样范围为半径的正方形区域内,采用RRT算法计算未知区域点:如果RRT计算的某点在要计算的地图范围内,并且该点在地图内的状态为空闲区域点,则将该点加入RRT树;如果该点在地图的状态为未知状态区域,则该点不加入RRT树,并将该点发布出去;
2.2 根据上一步检测的未知区域点执行sklearn.cluster.MeanShift聚类,获取聚类中心:
该部分订阅全局检测的未知区域点,并利用MeanShift算法获取聚类中心;
2.3 根据聚类中心计算各点增益,取最大增益点为目标,调用move_base规划路径和控制行走。
根据设定的信息半径,和上一步的聚类中心,结合聚类中心离机器人的距离,计算各个聚类中心的信息增益,然后取信息增益最大的点作为目标点,调用move_base来向该点移动;新的聚类中心和增益不停被计算,因此在运动过程中目标点可能会改变,或者因为移动地图中原来的目标点变为空闲区域,则新的目标点会被计算。
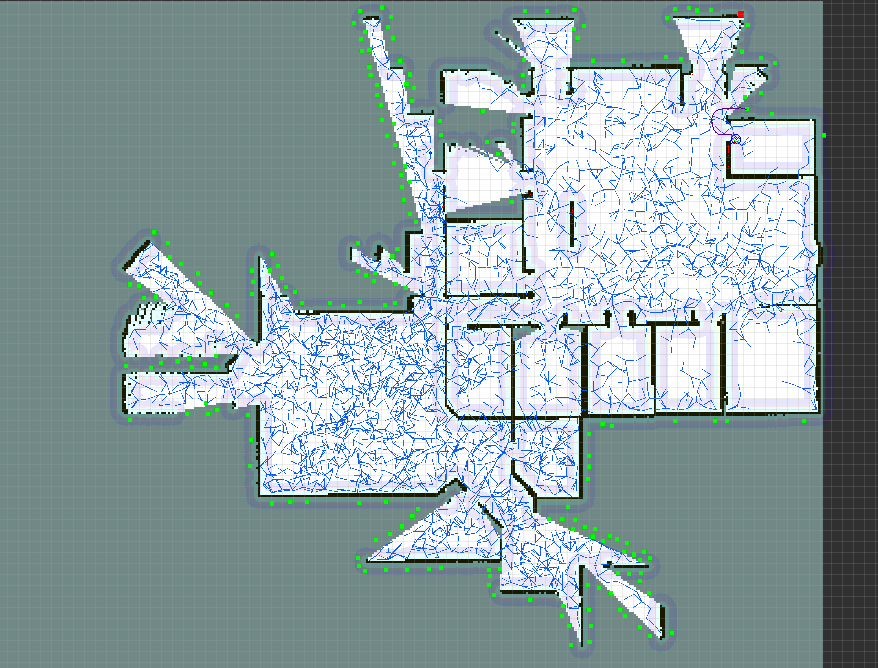
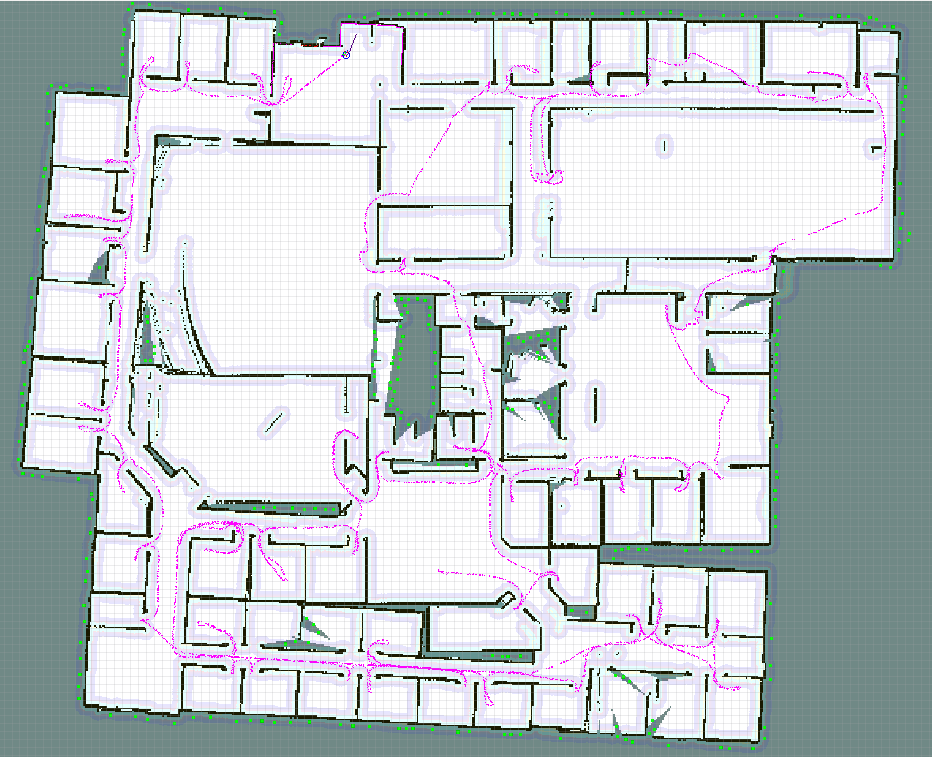
三、效果展示:
建图算法采用gmapping,激光角度220度.,激光范围14米。
蓝色线:全局RRT树;
绿色点:地图状态未知区域点
绿色线:move_base全局规划
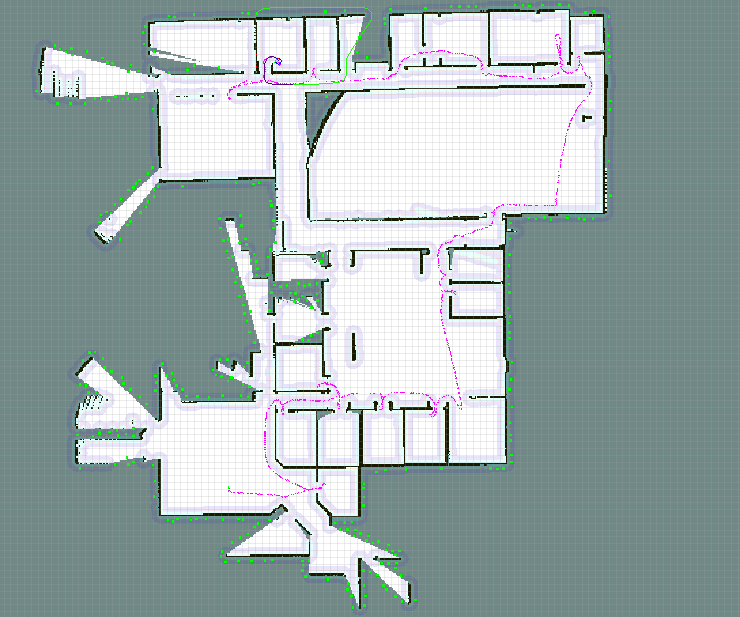
紫色线:机器人移动轨迹。
例一:



例二、

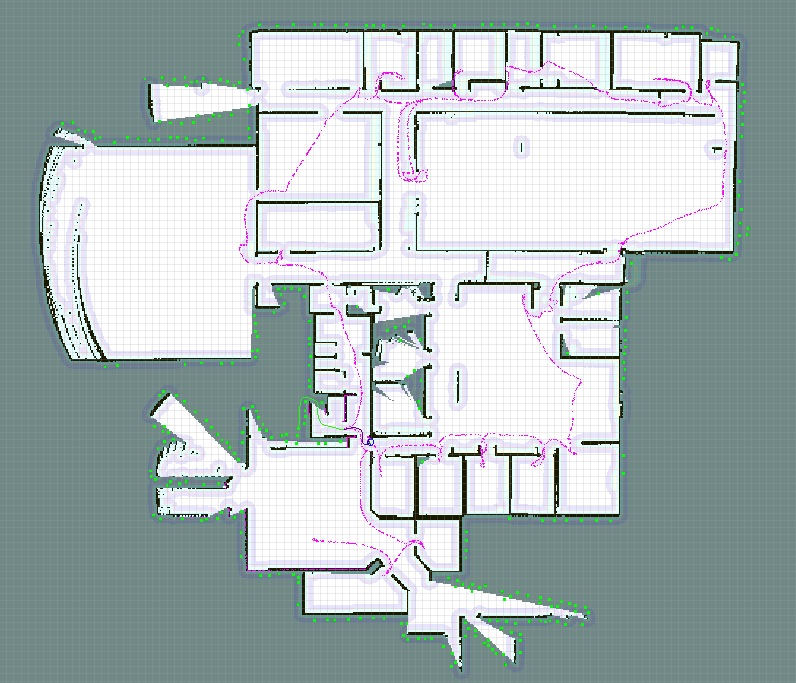
仿真环境下:左下角、底部及右下角图建歪了。
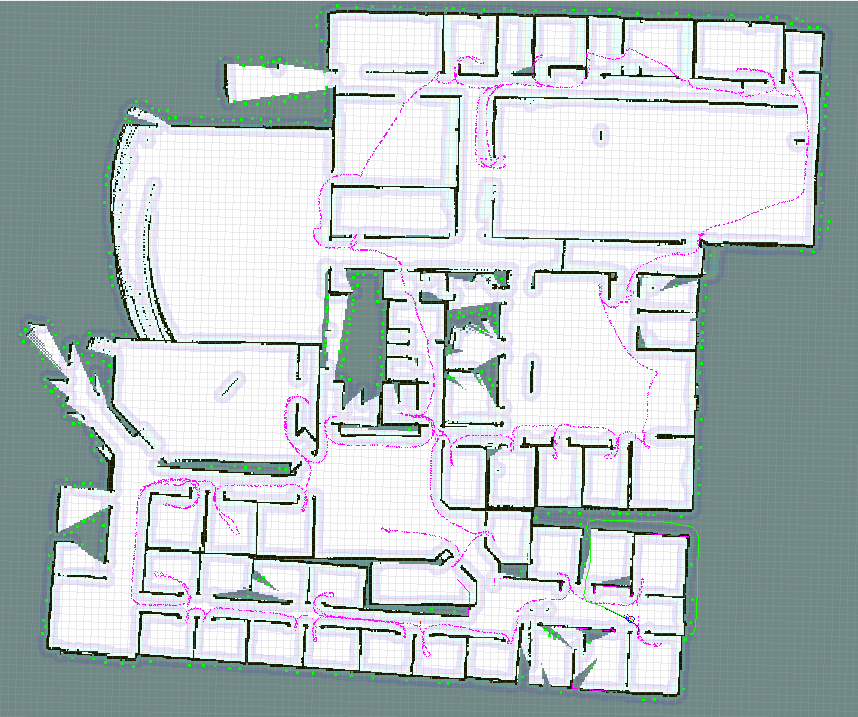
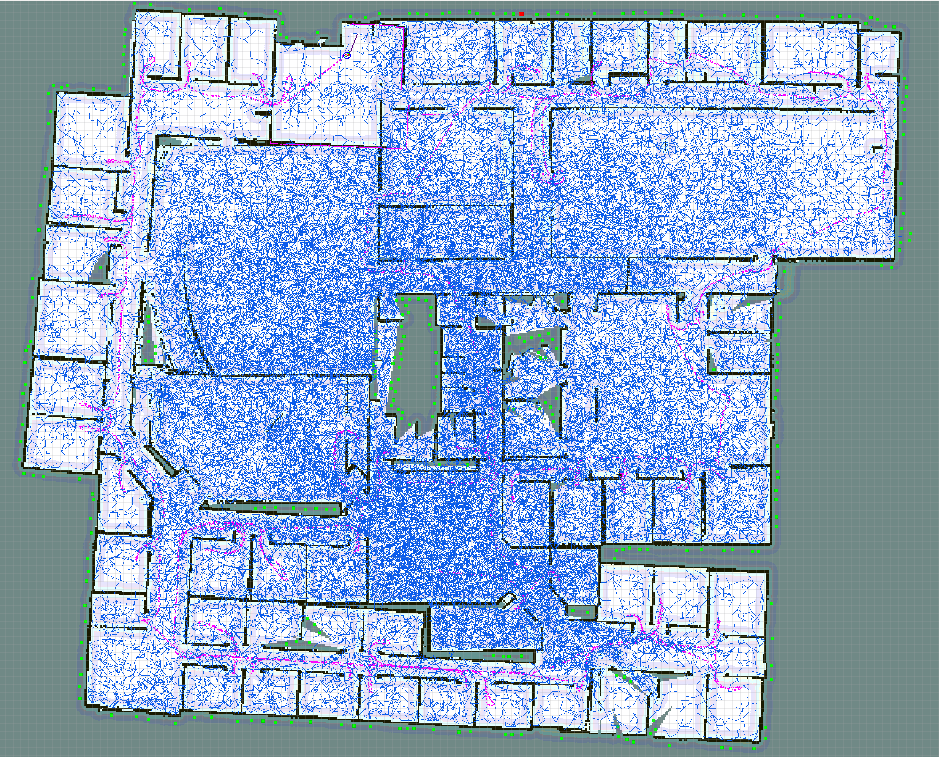
仿真模型大小:70米*64米

基于RRT的机器人自主探索建图的更多相关文章
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- 基于ros2 dashing的建图导航探索
基于ros2 dashing的建图导航探索 1. 环境准备 安装ros2 dashing, 参考链接: https://index.ros.org/doc/ros2/Installation/Dash ...
- 除了ROS ,机器人自主定位导航还能怎么做?
博客转载自:https://www.leiphone.com/news/201609/10QD7yp7JFV9H9Ni.html 雷锋网(公众号:雷锋网)按:本文作者科技剪刀手,思岚科技技术顾问. 随 ...
- cartographer环境建立以及建图测试(详细级)
- 机器人自主移动的秘密:实际应用中,SLAM究竟是如何实现的?(二)
博客转载自:https://www.leiphone.com/news/201612/FRzmoEI8Iud6CmT2.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- 【BZOJ-2879】美食节 最小费用最大流 + 动态建图
2879: [Noi2012]美食节 Time Limit: 10 Sec Memory Limit: 512 MBSubmit: 1366 Solved: 737[Submit][Status] ...
- 使用hector-slam和Kinect V1建图
一.建图实际操作 下载源码测试源码,depthimage_to_laserscan,参考https://blog.csdn.net/u010925447/article/details/5649468 ...
- 通过gmapping和伪造的odom,完成Kinect建图
传感器信息: 环境深度信息:sensor_msgs/laserScan -----> RGBD三维点云数据:通过ros功能包depthimage to laserscan完成深度相机数据转换成激 ...
随机推荐
- SpringMVC注解@RequestParam解析
1.可以对传入参数指定参数名 1 @RequestParam String inputStr 2 // 下面的对传入参数指定为param,如果前端不传param参数名,会报错 3 @RequestPa ...
- tcl之过程/函数-proc
- Python学习-django-Model操作
Django之Model操作 一.字段 AutoField(Field) - int自增列,必须填入参数 primary_key=True BigAutoField(AutoField) - bi ...
- ubuntu安装wine 和sourceinsght
ubuntu安装wine: 1.sudo apt-get update 2.sudo apt-get install wine 安装完成后会在当前用户目录的的家目录下生成.wine目录,该目录就是wi ...
- 財務会計関連(FI&CO)
[財務会計伝票]FB01: 登録FB02: 伝票変更FB09: 明細変更FB03: 照会FB04: 変更履歴照会FB08: 反対仕訳FB05: 消込転記FB50: G/L勘定伝票一般転記FB1S: 勘 ...
- 移动端的拖拽排序在react中实现 了解一下
最近做一个拖拽排序的功能找了好几个有一个步骤简单,结合redux最好不过了,话不多说上代码 第一步: npm install react-draggable-tags --save 第二步 sort. ...
- Samba和NFS文件共享
SAMBA文件共享服务 通过Yum软件仓库来安装Samba服务程序 [root@zhangjh ~]# yum install samba -y Samba 配置文件注释信息较多,为了便于配置,因此先 ...
- mysql in和exists性能比较和使用【转】
exists对外表用loop逐条查询,每次查询都会查看exists的条件语句,当 exists里的条件语句能够返回记录行时(无论记录行是的多少,只要能返回),条件就为真,返回当前loop到的这条记录, ...
- SQL语句知识点
PERSON表 NUMBER NAME SEX AGE 1 THERON male 19 2 JACK male 20 3 LUCY female 20 1.SELECT选择 SELECT 列 ...
- html---Web Storage存储
在HTML5中,除了Canvas元素之外,另一个新增的非常重要的功能是可以在客户端本地保存数据的Web Storage功能,之前可以使用Cookies在客户端保存如用户名等简单用户信息,但通过长期使用 ...