【YOLOv5】实现扑克牌的点数识别
前言
其实年初的时候,我也跟着别人的源码,用 Tensoflow 实现过扑克牌的目标检测。虽然也通过博文的方式记录了,但是那个项目使用的 TF 版本比较旧,自身对 TF 并不熟。后期如果说要升级或修改估计够呛,知道最近看到 YOLO 对目标检测的实现方法,发现这个更方便快捷。
于是决定用 YOLOv5.6 来重新实现一下扑克牌的点数识别,本文章主要是个人记录,也面向刚刚接触 YOLO 的同学阅读。所以以下会从数据标注,归一化处理到模型训练的实战内容,也包括各种踩坑经历和处理方法,最后对 detect.py 的重写,完成目标对象的坐标和识别标记输出。
YOLO 简介
YOLO(You Only Look Once)是一种基于深度神经网络的对象识别和定位算法,其最大的特点是运行速度很快,可以用于实时系统。现在 YOLO 已经发展到 v8 版本,每个版本都在原有基础上改进演化的。选择 V5 是因为后面几个新版发行并不久,v5 相关资料和文章较多,踩坑起来也好搜索。其中每个版本里又有按场景划分几个特定场景版本,比如:
- YOLOv5s:最小版本,速度最快,但检测性能最低。
- YOLOv5m:中等版本,速度比 s 慢一些,但检测性能更好。
- YOLOv5l:大型版本,速度比 m 慢,但检测性能更好。
- YOLOv5x:最大版本,速度最慢,但是检测性能最好。
- YOLOv5n6:中等版本,速度比 m 快一些,但检测性能更好。
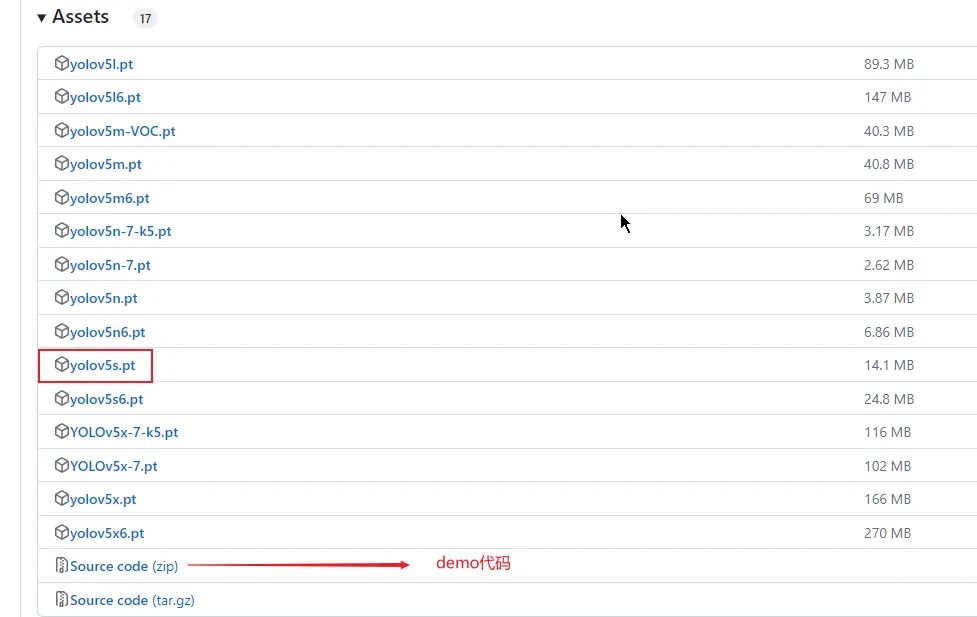
总之,根据具体需求和应用场景,可以选择合适的 YOLOv5 版本以满足性能、速度和准确性的要求,我这里以 YOLOv5s 为例。然后在项目开始前呢,我们可以先去 https://github.com/ultralytics/yolov5 下载 demo 代码和权重文件,比如 yolov5s.pt,下载完后就要准备数据集,也就是标记的图片。
数据集
图片的话,看你要识别的目标是啥,可以拍摄整理或去网上下载。为了让训练的模型稍微有点准确,最好准备一两百张,我这里就直接从原来 TF 项目那里拿过来。一共有 363 张扑克牌图片并且都已经用 VOC 格式标注好了,不过为了大家了解,这里还是会介绍如何标注,以及标注工具 labelImg 的基本使用。
LabelImg 使用
操作界面
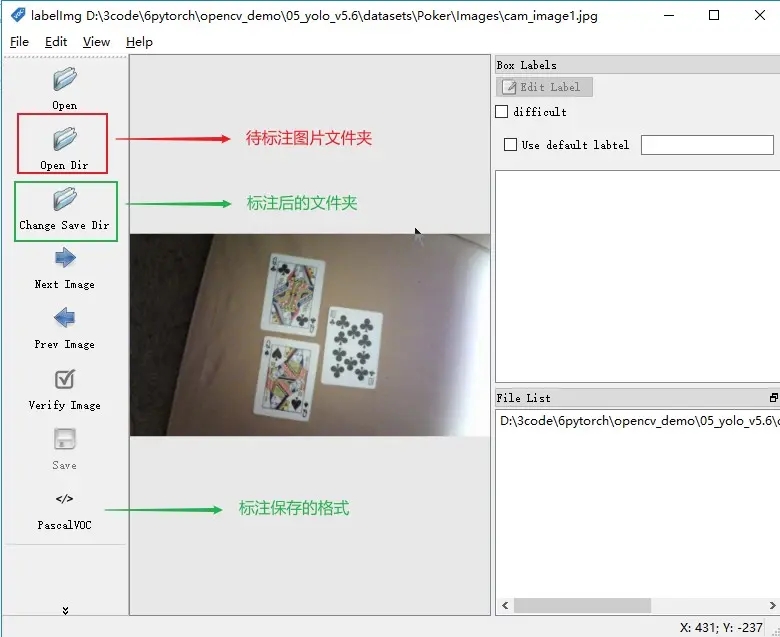
快捷使用
1、W 是进行标注
2、A 是切换到上一张图片
3、D 是切换到下一张图片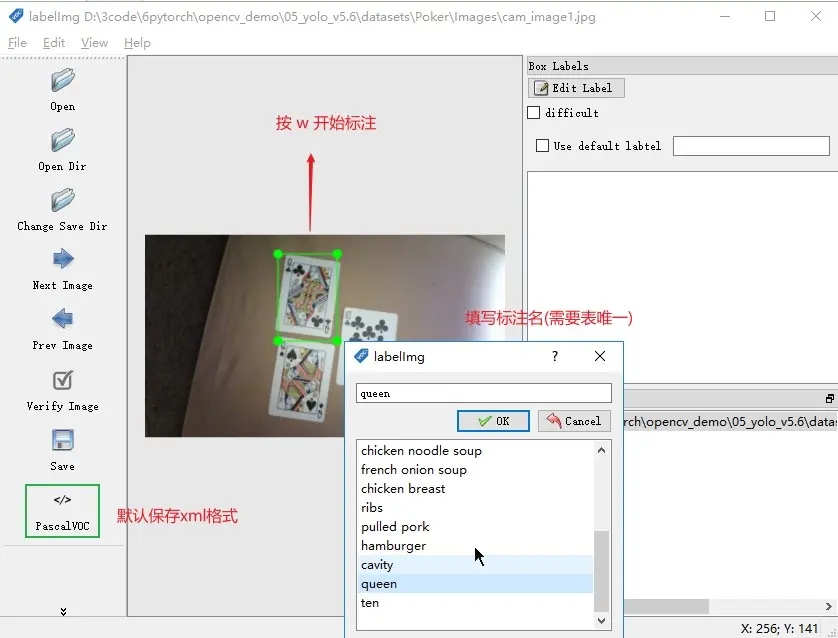
LabelImg 保存格式
1. PascalVOC 默认,xml格式
2. YOLO text可以直接拿来训练不用转换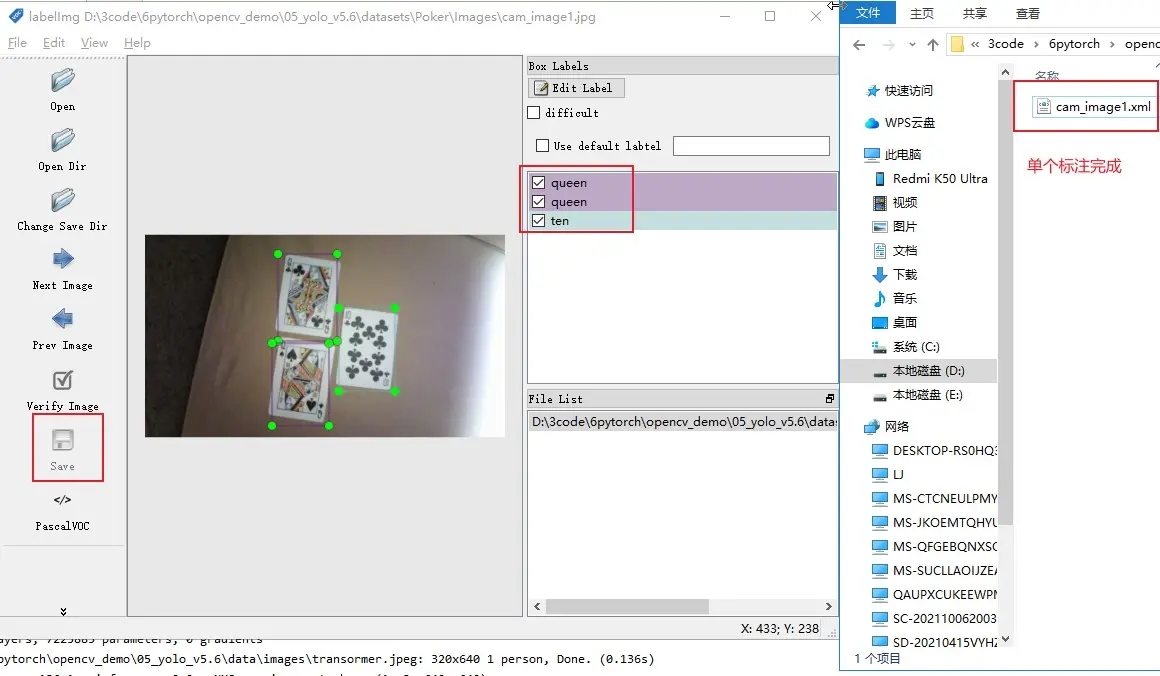
实战
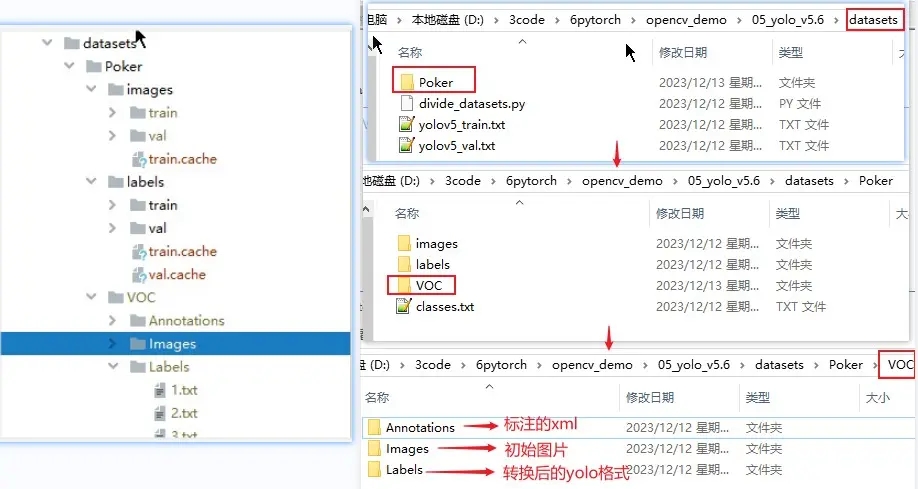
创建目录
在根目录下新建 datasets 用于放置训练的数据集,由于用同一 yolo 可以创建多个检测目标,所以在 datasets 先创建一个项目名目录。然后再在项目名下可创建 VOC 和 YOLO 两种格式的目录,虽然 labelImg 标注后可以直接保存 YOLO 格式也就是归一化后的 text,但是毕竟三百多张图的标注,我这里依然使用以前 TF 的 VOC 的标注数据。如果需要这些数据集的,可以留言,到时我再放在评论区。
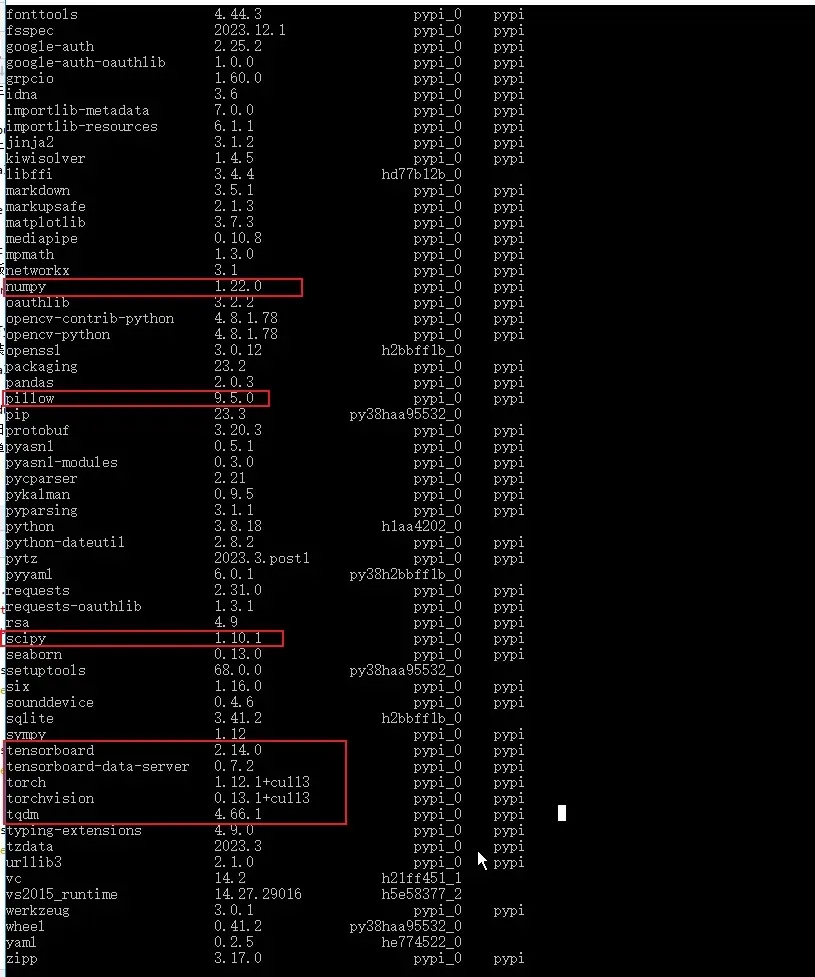
依赖安装
依赖直接安装项目根目录下的 requirements.txt 就可以,但是要严格按照里面的版本。因为我用的是以前 conda 创建的环境,可以包都装过,所以一开始就看到已经有的就没装,导致后面运行的时候很多问题都是包的版本问题。所以最好的方法就是用 conda 创建一个新环境,然后直接 pip install -r requirements.txt 是最好的。
归一化和数据集划分
如果 LabelImg 标注后保存的是 YOLO 格式,归一化过程就可以略过了。前面我也说了是用的以前扑克牌的 VOC 格式,所以需要对 xml 里节点数据抽取坐标和标记然后转换成 yolo 的 txt 格式。以下代码是我从其他博主那薅过来的,主要就是归一化和划分训练数据集和校验数据集。特别主要是 classes 部分要修改成自己的目标分类,其他的可以不用改动,当然只是划分的话可以适当删减。
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
import random
from shutil import copyfile classes = ["nine", "ten", "jack", "queen", "king", "ace"]
TRAIN_RATIO = 80 def clear_hidden_files(path):
dir_list = os.listdir(path)
abspath = ""
for i in dir_list:
abspath = os.path.join(os.path.abspath(path), i)
if os.path.isfile(abspath):
if i.startswith("._"):
os.remove(abspath)
else:
clear_hidden_files(abspath) def convert(size, box):
dw = 1. / size[0]
dh = 1. / size[1]
x = (box[0] + box[1]) / 2.0
y = (box[2] + box[3]) / 2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h) def convert_annotation(image_id):
in_file = open('Poker/VOC/Annotations/%s.xml' % image_id)
out_file = open('Poker/VOC/Labels/%s.txt' % image_id, 'w') tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text) for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
bb = convert((w, h), b) out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n') in_file.close()
out_file.close() # 开始执行 ##
wd = os.getcwd()
data_base_dir = os.path.join(wd, "Poker/")
if not os.path.isdir(data_base_dir):
os.mkdir(data_base_dir) work_sapce_dir = os.path.join(data_base_dir, "VOC/")
if not os.path.isdir(work_sapce_dir):
os.mkdir(work_sapce_dir) annotation_dir = os.path.join(work_sapce_dir, "Annotations/")
if not os.path.isdir(annotation_dir):
os.mkdir(annotation_dir) image_dir = os.path.join(work_sapce_dir, "Images/")
if not os.path.isdir(image_dir):
os.mkdir(image_dir) yolo_labels_dir = os.path.join(work_sapce_dir, "Labels/")
if not os.path.isdir(yolo_labels_dir):
os.mkdir(yolo_labels_dir) yolov5_images_dir = os.path.join(data_base_dir, "images/")
if not os.path.isdir(yolov5_images_dir):
os.mkdir(yolov5_images_dir) yolov5_labels_dir = os.path.join(data_base_dir, "labels/")
if not os.path.isdir(yolov5_labels_dir):
os.mkdir(yolov5_labels_dir) yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/")
if not os.path.isdir(yolov5_images_train_dir):
os.mkdir(yolov5_images_train_dir) yolov5_images_test_dir = os.path.join(yolov5_images_dir, "val/")
if not os.path.isdir(yolov5_images_test_dir):
os.mkdir(yolov5_images_test_dir) yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/")
if not os.path.isdir(yolov5_labels_train_dir):
os.mkdir(yolov5_labels_train_dir) yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "val/")
if not os.path.isdir(yolov5_labels_test_dir):
os.mkdir(yolov5_labels_test_dir) train_file = open(os.path.join(wd, "yolov5_train.txt"), 'w')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'w')
train_file.close()
test_file.close() train_file = open(os.path.join(wd, "yolov5_train.txt"), 'a')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'a') list_imgs = os.listdir(image_dir) # list image files
prob = random.randint(1, 100)
print("Probability: %d" % prob) for i in range(0, len(list_imgs)):
path = os.path.join(image_dir, list_imgs[i])
if os.path.isfile(path):
image_path = image_dir + list_imgs[i]
voc_path = list_imgs[i]
(nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path))
(voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path))
annotation_name = nameWithoutExtention + '.xml'
annotation_path = os.path.join(annotation_dir, annotation_name) label_name = nameWithoutExtention + '.txt'
label_path = os.path.join(yolo_labels_dir, label_name) prob = random.randint(1, 100)
print("Probability: %d" % prob) if (prob < TRAIN_RATIO): # train dataset
if os.path.exists(annotation_path):
train_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_train_dir + voc_path)
copyfile(label_path, yolov5_labels_train_dir + label_name)
else: # test dataset
if os.path.exists(annotation_path):
test_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_test_dir + voc_path)
copyfile(label_path, yolov5_labels_test_dir + label_name) train_file.close()
test_file.close()
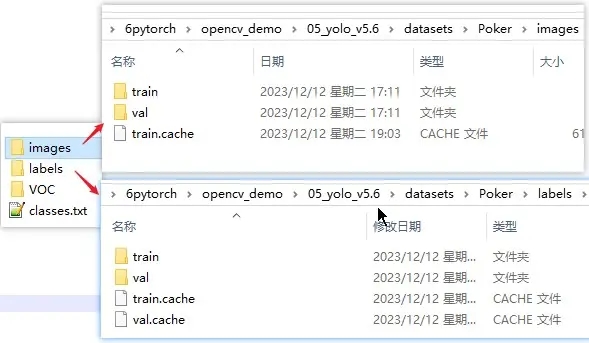
上面代码放在哪个位置看你自己,由于有些目录是相对位置,所以如果不想改也跟我一样放在 datasets 中。执行完上面代码后会在 datasets 下生成 images 和 labels 两个目录,而且特别注意的是这两个目录名最好就是也是这样,比如在上面代码改了生成名,在后面训练的时候,会提示找不到 labels 目录。当然也可以修改 YOLO 提供源码的 dataset.py,看个人选择,而且 images 里的 train 和 val 需要配置到 data 的 yaml 中,这个马上就会说。
配置
数据集配置
该默认文件位于项目的 data/coco128.yaml,现在我们进行划分了数据集和自己的目标种类,当然要对其进行重新配置。最好的方法就是复制一份 coco128 然后修改名称,如下面 coco128_pocker.yaml 是我的配置示例。
train: D:\3code\6pytorch\opencv_demo\05_yolo_v5.6\datasets\Poker\images\train # train images (relative to 'path') 128 images
val: D:\3code\6pytorch\opencv_demo\05_yolo_v5.6\datasets\Poker\images\val # val images (relative to 'path') 128 images # Classes
nc: 6 # number of classes
names: ["nine", "ten", "jack", "queen", "king", "ace"] # class names # Download script/URL (optional)
download: https://ultralytics.com/assets/coco128.zip
模型配置
该默认文件位于项目的 model 下,然后选择自己的场景,如我用的是 v5s 同样就复制一份重命名。这个文件主要是定义模型的基本机构和参数,比如分类数目 nc,模型深度倍数 depth_multiple,每层通道数倍数 width_multiple,以及目标框的大小和比例的 anchors。在刚使用 YOLO 的话,我们就改个 nc 就可以,后面再研究这些参数的用法,下面是 yolov5s_pocker.yaml 的示例。
# Parameters
nc: 6 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32 # YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
] # YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13 [-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small) [-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium) [-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large) [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
权重文件
这个就是我们从 yolo 开源那里下载的 yolov5s.pt,这里面有 80 个类目的检测,在基础识别时候可以直接用它。而训练自己的目标也需要基于他的权重再进行训练,所以可以在项目中创建一个 weights,然后再将 yolov5s.pt 放到其中。
训练
基础预测
在训练目标模型前,可以先试试以前的基础检测,这里我们可以随便拿一张图放到 data/images 下,然后执行下面命令,根目录下会生成 runs,而 runs 下的 detect 会根据每次执行的次数生成不同次的标注结果。
python detect.py --weights weights/yolov5s.pt --source data/images/zidane.jpg
指令介绍
source: 需要进行检测的图片或视频的文件位置
weigths: 指的是训练好的网络模型,用来初始化网络权重
cfg:为configuration的缩写,指的是网络结构,一般对应models文件夹下的xxx.yaml文件
data:训练数据路径,一般为data文件夹下的xxx.yaml文件
epochs:设置训练的轮数(自己电脑上一般建议先小一点,测试一下,看跑一轮要多久)
batch-size:每次输出给神经网络的图片数,(需要根据自己电脑性能进行调整)
img-size:用于分别设置训练集和测试集的大小。两个数字前者为训练集大小,后者为测试集大小
image-weights:测试过程中,图像的那些测试地方不太好,对这些不太好的地方加权重
device:训练网络的设备cpu还是gpu
multi-scale:训练过程中对图片进行尺度变换
workers: 多线程训练
label-smoothing: 对标签进行平滑处理,防止过拟合开始训练
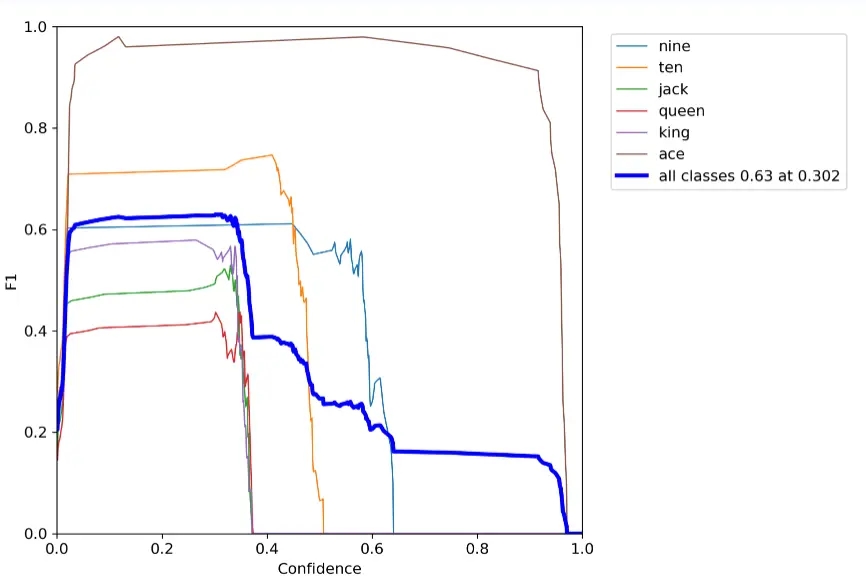
以下是我踩过坑后执行的命令,因为当时我用 CPU 训练一轮要 7 分钟就改成了 GPU,加了 --device 0 后速度快了 4 倍。batch-size 为 2,这么小是因为我的显卡 750Ti 显存只有 2G,就暂时用了这个数值。而加了 --workers 0,也是因为有坑,这个后面再说。训练完成后,会在根目录的 runs/train 下生成每次运行的权重文件和损失准确示例图等,其中 weights 下的 best.pt 和 last.pt,分别表示本轮训练最好的权重和最新的权重。
python train.py --weights weights/yolov5s.pt --cfg models/yolov5s_pocker.yaml --data data/coco128_pocker.yaml --epochs 1 --batch-size 2 --multi-scale --device 0 --workers 0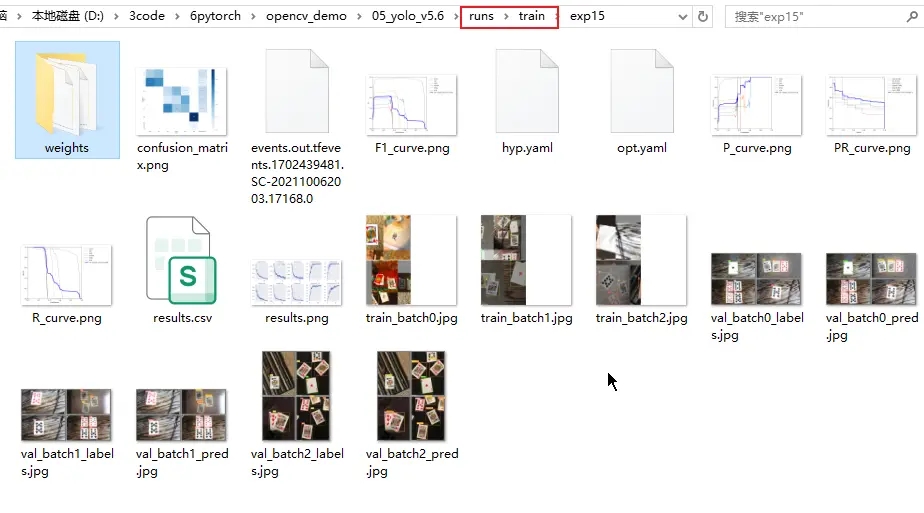
开始检测
训练完成后,我们可以把本轮的 best.pt 放到根目录的 weights 下,以下是不同检测方式的命令,可以分别都试一下。
1. 图片
python detect.py --weights weights/best.pt --data data/coco128_pocker.yaml --source data/images/cam_image16.jpg
2. 视频
python detect.py --weights weights/best.pt --data data/coco128_pocker.yaml --source data/images/test.mov
3. 使用cuda测试
python detect.py --device 0 --weights weights/best.pt --data data/coco128_pocker.yaml --source data/images/IMG_2681.JPG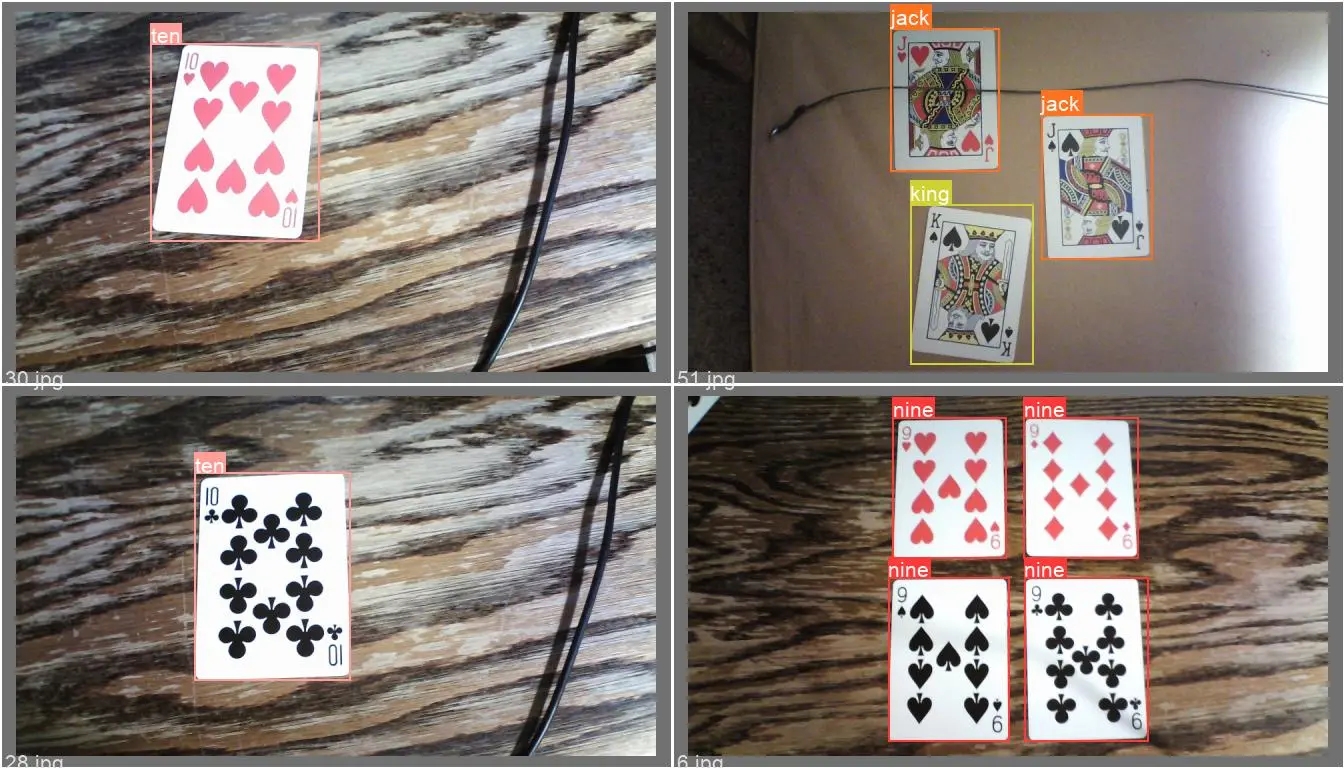
detect.py 重写
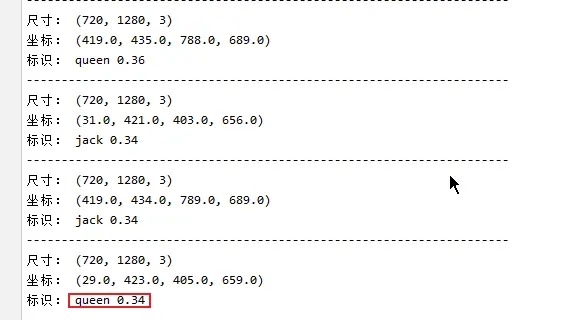
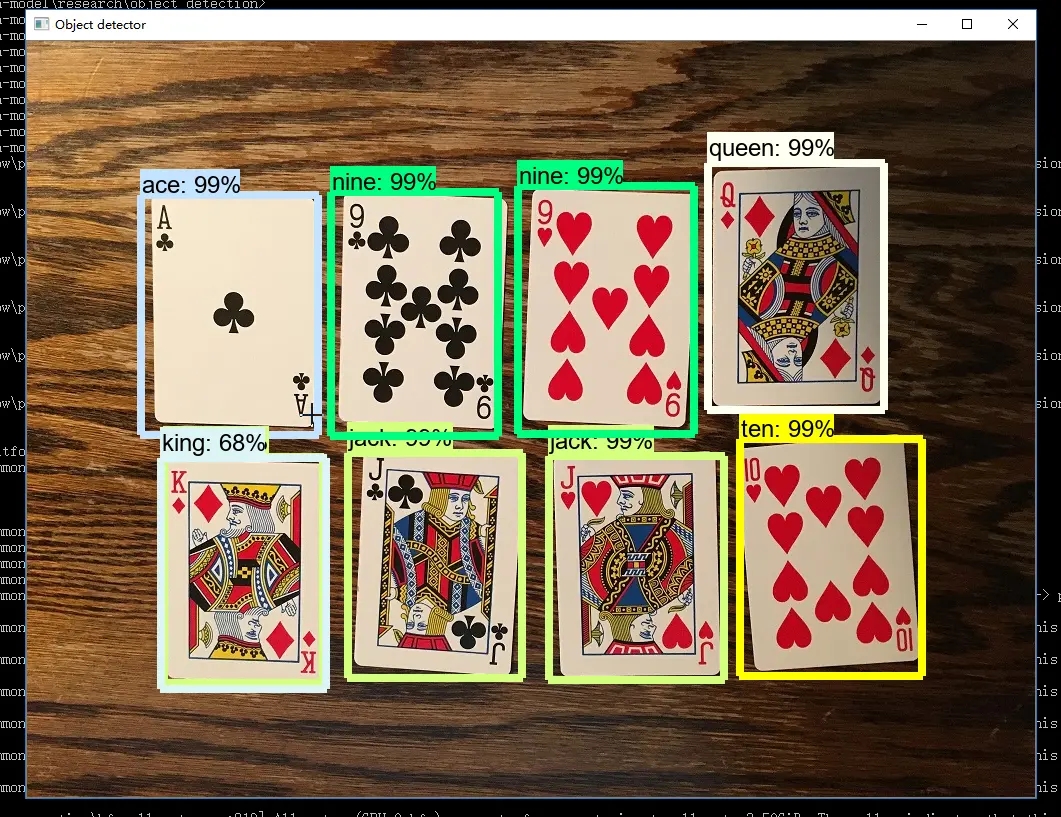
因为在实际项目中,我们对图片和视频的目标检测,更多的可能是通过前端传递过来的图片或视频,模型给出的是预测的类目名称和目标的位置,而不是直接生成标注的图片和视频。所以我对 demo 提供的 detect 进行了简单的修改,修改结果就是前面放出的图片,不过还是采用命令方式,当然也可以直接改成接口,最后就是如果需要代码的可以评论区留言哈。
import warnings
warnings.filterwarnings("ignore")
import argparse
from utils.datasets import *
from utils.torch_utils import *
from utils.augmentations import *
from utils.general import *
from models.common import DetectMultiBackend
from utils.plots import Annotator, colors, save_one_box
import time
import cv2
import torch
import random
import numpy as np
def detect(save_img=False):
# 解析配置参数
source, weights, data, imgsz = opt.source, opt.weights, opt.data, opt.img_size
# 初始化 模型推理硬件
device = select_device(opt.device)
model = DetectMultiBackend(weights, device=device, dnn=False, data=data)
stride, names, pt, jit, onnx, engine = model.stride, model.names, model.pt, model.jit, model.onnx, model.engine
imgsz = check_img_size(imgsz, s=stride)
dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt)
dt, seen = [0.0, 0.0, 0.0], 0
for path, im, im0s, vid_cap, s in dataset:
t1 = time_sync()
# im = torch.from_numpy(im).to(device)
im = torch.from_numpy(im.astype(np.float32)).to(device)
im /= 255 # 0 - 255 to 0.0 - 1.0
if len(im.shape) == 3:
im = im[None] # expand for batch dim
t2 = time_sync()
dt[0] += t2 - t1
dt[0] += t2 - t1
# Inference
# visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
pred = model(im)
t3 = time_sync()
dt[1] += t3 - t2
# NMS
pred = non_max_suppression(pred, 0.25, 0.45, None, False, max_det=1000)
dt[2] += time_sync() - t3
for i, det in enumerate(pred):
p, s, im0 = source, '', im0s
# print('im0_shape:', im0.shape)
s += '%gx%g ' % im.shape[2:] # print string
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
if det is not None and len(det):
# 推理的图像分辨率转为原图分辨率:Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
s += '%g %ss, ' % (n, names[int(c)]) # add to string
# Write results
output_dict_ = []
for *xyxy, conf, cls in det:
x1, y1, x2, y2 = xyxy
output_dict_.append((float(x1), float(y1), float(x2), float(y2)))
label = '%s %.2f' % (names[int(cls)], conf)
print("---------------------------------------------------------------------")
print("尺寸:", im0.shape)
print("坐标:", (float(x1), float(y1), float(x2), float(y2)))
print("标识:", label)
# print("output_dict_ : ", output_dict_)
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='weights/yolov5s.pt', help='model.pt path')
parser.add_argument('--data', type=str, default='data/coco128_pocker.yaml', help='dataset.yaml path')
parser.add_argument('--source', type=str, default="./video/1.mp4", help='source') # file/folder, 0 for webcam
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.31, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--fourcc', type=str, default='mp4v', help='output video codec (verify ffmpeg support)')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', default=False, help='augmented inference')
opt = parser.parse_args()
print(opt) # 打印输入配置参数
with torch.no_grad():
detect(save_img=True)
报错汇总
1. Scanning 'D:\3code\6pytorch\opencv_demo\05_yolo_v5.6\datasets\Poker\Images\train' images and labels...0 found, 284 missing, 0 empty, 0 corrupt
图片和标注文件夹名称,要分别是 images 和 labels,可以在 utils/datasets.py 中修改,为了快速运行还是把文件夹名字改一下解决。
2. AttributeError: module 'numpy' has no attribute 'int'.
主要是由于 numpy 的版本引起,将 numpy 降低 1.24 以下可解决,或者对 numpy 源码进行修改。
pip install numpy==1.22 -i https://pypi.tuna.tsinghua.edu.cn/simple3. result type Float can't be cast to the desired output type __int64
原因是新版的 torch 无法自动执行此转换,可以通过降级 torch 解决,也可以在 yolo 项目的 utils 中找到 loss.py,将 gain = torch.ones (7, device=targets.device),
修改为 gain = torch.ones (7, device=targets.device).long ()
4. 'FreeTypeFont' object has no attribute 'getsize'
原因是安装的 Pillow 版本过高,解决方法就是将其降级
pip install Pillow==9.5 -i https://pypi.tuna.tsinghua.edu.cn/simple5. No module named 'torch._dynamo'
通过报错日志看到是先 import torchvision 后提示的错误,而我本地安装的是 cuda 的 torch1.12.1,相对应的要下载 cuda 的 torchvision0.13.1 版本
如果需要单独安装可以去 https://download.pytorch.org/whl/torch_stable.html,找到对应平台,python 脚本和版本下载后再通过 pip 安装
6. OSError: [WinError 1455] 页面文件太小,无法完成操作
在命令行中设置 --workers 0 ,这个是设置多线程的参数,在个人机器上,这个参数到底设置多少,一般和 --batch-siz 有关,如果 batch-size 设置小,workers 就调大
7. CUDA out of memory. Tried to allocate 20.00 MiB (GPU 0; 2.00 GiB total capacity; 1.08 GiB already allocated
显卡的显存太小就把 batch 调小
python train.py --weights weights/yolov5s.pt --cfg models/yolov5s_pocker.yaml --data data/coco128_pocker.yaml --epochs 1 --batch-size 2 --multi-scale --device 0 --workers 0
【YOLOv5】实现扑克牌的点数识别的更多相关文章
- 【YOLOv5】LabVIEW+YOLOv5快速实现实时物体识别(Object Detection)含源码
前言 前面我们给大家介绍了基于LabVIEW+YOLOv3/YOLOv4的物体识别(对象检测),今天接着上次的内容再来看看YOLOv5.本次主要是和大家分享使用LabVIEW快速实现yolov5的物体 ...
- 基于AForge.Net框架的扑克牌识别
原文:基于AForge.Net框架的扑克牌识别 © 版权所有 野比 2012 原文地址:点击查看 作者:Nazmi Altun Nazmi Altun著,野比 译 下载源代码 - 148.61 KB ...
- 【YOLOv5】手把手教你使用LabVIEW ONNX Runtime部署 TensorRT加速,实现YOLOv5实时物体识别(含源码)
前言 上一篇博客给大家介绍了LabVIEW开放神经网络交互工具包[ONNX],今天我们就一起来看一下如何使用LabVIEW开放神经网络交互工具包实现TensorRT加速YOLOv5. 以下是YOLOv ...
- 软件开发目录规范、python常用内置模块
编程思想的转变 1.面条版阶段 所有的代码全部堆叠在一起.可以看成是直接将所有的数据放在C盘 视频.音频.文本.图片 2.函数版阶段 根据功能的不同封装不同的函数.可以看成是将C盘下的数 ...
- [ZPG TEST 105] 扑克游戏【Huffman】
扑克游戏 (poker) 题目描述: 有一棵无穷大的满二叉树,根为star,其余所有点的权值为点到根的距离,如图: 现在你有一些扑克牌,点数从1到13,你要把这些扑克牌全部放到这个树上: 当你把点数为 ...
- 分布排序(distribution sorts)算法大串讲
ref : https://dsqiu.iteye.com/blog/1707383 本文内容框架: §1 鸽巢排序(Pigeonhole) §2 桶排序(Bucket Sort) §3 基数 ...
- 箱排序(Bin Sort)
1.基本思想 排序过程无须比较关键字,而是通过"分配"和"收集"过程来实现排序.它们的时间复杂度可达到线性阶:O(n). 箱排序也称桶排序(Bucket Sor ...
- JZOJ 1736. 扑克游戏 (Standard IO)
1736. 扑克游戏 (Standard IO) Time Limits: 1000 ms Memory Limits: 128000 KB Description 有一棵无穷大的满二叉树,根为sta ...
- P1837 单人纸牌
写在前面 感谢巨佬 yu__xuan 的帮助! 原本题解区的大佬们大都写的九层循环,其实此题如果写成状压,可以将这九层循环写成一层,非但简洁.代码可读性强,常数也比直接九维 dp 小. 算法思路 由于 ...
- collections、time、datetime、random模块
今日内容概要 1.re模块的其他知识 2.正则起别名与分组机制 3.collections模块 4.time与datetime模块 5.random随机数模块 今日内容详细 re模块的其他知识 imp ...
随机推荐
- Android13深入了解 Android 小窗口模式和窗口类型
Android13深入了解 Android 小窗口模式和窗口类型 小窗模式,作为一种在移动设备上的多任务处理方式,为用户带来了便捷和高效的体验,尤其在一些特定场景下,其价值愈发凸显.以下是为什么需要小 ...
- 如何调用api接口获取到商品数据
要调用API接口获取商品数据,需要进行以下步骤: 确定API接口 首先需要确定要使用的API接口,可以通过搜索引擎或者相关文档来查找适合的API接口.以淘宝开放平台为例,可以使用淘宝的商品信息查询AP ...
- 在线问诊 Python、FastAPI、Neo4j — 创建症状节点
目录 症状数据 创建节点 附学习 电子病历中,患者主诉对应的相关检查,得出的诊断以及最后的用药情况.症状一般可以从主诉中提取. 症状数据 symptom_data.csv CSV 中,没有直接一行一个 ...
- 6-MySQL查询条件
在MySQL中,高级查询是指使用更复杂的查询语句和操作符来检索和操作数据库中的数据.高级查询可以帮助您更精确地找到所需的信息,并提高查询的效率和灵活性. 以下是高级查询的一些常见应用场景和意义: 连接 ...
- 千呼万唤始出来 JDK 21 LTS, 久等了
平地起惊雷!!! 目录 英雄的迟暮 大人时代变了 JDK 21 LTS 前 JAVA并发编程模型 JDK 21 LTS 中的 JAVA 并发编程模型 虚拟线程 VS 线程池 The Last 你可以称 ...
- 深入理解 Socket 编程:网络通信的基石
深入理解 Socket 编程:网络通信的基石 引言 在现代计算机网络中,网络通信是各种应用程序之间进行数据交换和信息传输的基础.Socket 编程是实现网络通信的关键组件之一,它提供了一种方便而强大的 ...
- 详解RecyclerView的预布局
概述 RecyclerView 的预布局用于 Item 动画中,也叫做预测动画.其用于当 Item 项进行变化时执行的一次布局过程(如添加或删除 Item 项),使 ItemAnimator 体验更加 ...
- 12 款最棒 Vue 开源 UI 库
文章目录 Element Plus - 经典中的经典,全面支持 Vue 3 TDesign Vue - 鹅厂优质 UI 组件,配套工具完满,设计工整,文档清晰 ArcoDesign Vue- 字节优质 ...
- Python面向对象——Mixin机制、重载、多态与鸭子类型、绑定与非绑定方法、Python常见的内置函数
文章目录 内容回顾 Mixin机制 1.什么是Mixin 2.Mixin来源 3.定义及优点 4.在python中的应用 5.在Django项目中的应用 重载(在子类派生的新方法中如何重用父类的功能) ...
- 10. 用Rust手把手编写一个wmproxy(代理,内网穿透等), HTTP内网穿透支持修改头信息
用Rust手把手编写一个wmproxy(代理,内网穿透等), HTTP内网穿透支持修改头信息 项目 ++wmproxy++ gite: https://gitee.com/tickbh/wmproxy ...