特征提取算法(4)——Harris角点提取
1、角点
1.1 特征点与角点
特征点是计算机视觉算法的基础,使用特征点来代表图像的内容。
角点是一类重要的点特征,图像分析的角度来定义:
- 角点可以是两个边缘的角点;
- 角点是邻域内具有两个主方向的特征点;
有以下特点:
- 局部窗口沿各方向移动,均产生明显变化;
- 图像局部曲率突变;
不同类型的角点:
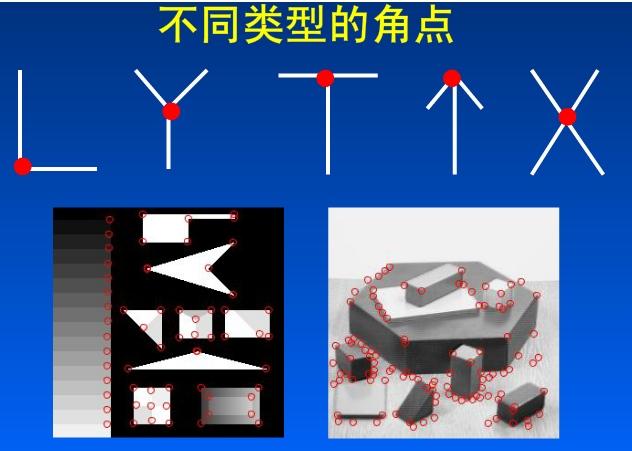
1.2 典型的角点检测算法
一种需要对图像边缘进行编码,这在很大程度上依赖于图像的分割与边缘提取,具有相当大的难度和计算量,且一旦待检测目标局部发生变化,很可能导致操作的失败。
另一种基于图像灰度的方法通过计算点的曲率及梯度来检测角点,避免了第一类方法存在的缺陷,此类方法主要有Moravec算子、Forstner算子、Harris算子、SUSAN算子等。
比较著名的角点检测方法还有jianbo Shi和Carlo Tomasi提出的Shi-Tomasi算法,这个算法开始主要是为了解决跟踪问题,用来衡量两幅图像的相似度,我们也可以把它看为Harris算法的改进。OpenCV中已经对它进行了实现,接口函数名为GoodFeaturesToTrack()。
另外还有一个著名的角点检测算子即SUSAN算子,SUSAN是Smallest Univalue Segment Assimilating Nucleus(最小核值相似区)的缩写。SUSAN使用一个圆形模板和一个圆的中心点,通过圆中心点像素与模板圆内其他像素值的比较,统计出与圆中心像素近似的像元数量,当这样的像元数量小于某一个阈值时,就被认为是要检测的角点。我觉得可以把SUSAN算子看为Harris算法的一个简化。这个算法原理非常简单,算法效率也高,所以在OpenCV中,它的接口函数名称为:FAST() 。
2、Harris角点检测
Harris角点检测算子是于1988年由CHris Harris& Mike Stephens提出来的。在具体展开之前,不得不提一下Moravec早在1981就提出来的Moravec角点检测算子。
2.1 Moravec角点检测算子
在图像上取一个W*W的“滑动窗口”,不断的移动这个窗口并检测窗口中的像素变化情况E。像素变化情况E可简单分为以下三种:
- 如果在窗口中的图像是什么平坦的,那么E的变化不大;
- 如果在窗口中的图像是一条边,那么在沿这条边滑动时E变化不大,而在沿垂直于这条边的方向滑动窗口时,E的变化会很大;
- 如果在窗口中的图像是一个角点时,窗口沿任何方向移动E的值都会发生很大变化。

上图就是对Moravec算子的形象描述。用数学语言来表示的话就是图像I(x,y),当点(x,y)处平移(Δx,Δy)后的自相似性,自相关函数给出:

其中W(x,y)是以点(x,y)为中心的窗口,ω(u,v)是加权函数,可以是常数,也可以是高斯加权函数:

其中(Δx,Δy)就表示四个移动方向(1,0)(1,1)(0,1)(-1,1),E就是像素的变化值。Moravec算子对四个方向进行加权求和来确定变化的大小,然和设定阈值,来确定到底是边还是角点。
2.2 Harris角点检测算子原理
Harris角点检测算子实质上就是对Moravec算子的改良和优化。
作者提出了三点Moravec算子的缺陷并且给出了改良方法:
(1)Moravec算子对方向的依赖性太强,在上文中我们可以看到,Moravec算子实际上只是移动了四个45度角的离散方向,真正优秀的检测算子应该能考虑到各个现象的移动变化情况。为此,作者采用微分的思想:

泰勒公式展开:

也就是说图像I(x,y在点)(x,y)处平移(Δx,Δy)后的自相关函数可以近似为二项函数:

其中:

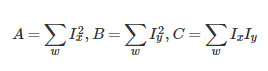
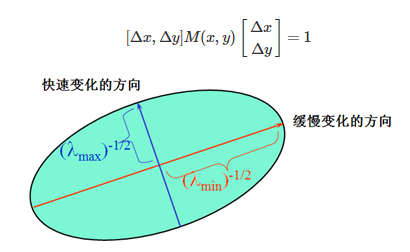
二次项函数本质上就是一个椭圆函数。椭圆的扁率和尺寸是由M(x,y)的特征值λ1、λ2λ1、λ2决定的,椭贺的方向是由M(x,y)M(x,y)的特征矢量决定的,如下图所示,椭圆方程为:
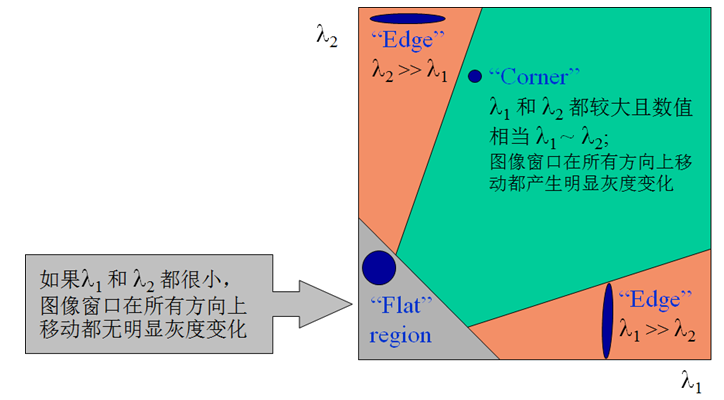
椭圆函数特征值与图像中的角点、直线(边缘)和平面之间的关系如下图所示。共可分为三种情况:
- 一个特征值大,另一个特征值小,自相关函数值在某一方向上大,在其他方向上小,则表示检测到边;
- 两个特征值都小,且近似相等;自相关函数数值在各个方向上都小,则表示检测到图像中的平面(平坦部分);
- 两个特征值都大,且近似相等,自相关函数在所有方向都增大。表示检测到了角点。
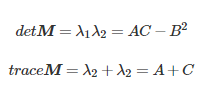
根据二次项函数特征值的计算公式,我们可以求M(x,y)矩阵的特征值。但是Harris给出的角点差别方法并不需要计算具体的特征值,而是计算一个角点响应值R来判断角点。R的计算公式为:
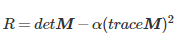
其中detM为矩阵M的行列式,traceM为矩阵M的直迹,取值范围为0.04~0.06。事实上,特征是隐含在detM和traceM中,因为:
2.2 Harris角点检测实现

2.3 Harris角点的性质


参考自:https://www.cnblogs.com/ronny/p/4009425.html
特征提取算法(4)——Harris角点提取的更多相关文章
- OpenCV计算机视觉学习(13)——图像特征点检测(Harris角点检测,sift算法)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 前言 ...
- 特征点提取之Harris角点提取法
1. 特征点提取的意义 2.角点 3. Harris角点检測的基本原理 4.Harris角点检測算法的步骤 5.Harris角点提取算法设计 <span style="font-siz ...
- harris角点检测的简要总结
目录 1. 概述相关 2. 原理详解 1) 算法思想 2) 数学模型 3) 优化推导 3. 具体实现 1) 详细步骤 2) 最终实现 4. 参考文献 1. 概述相关 harris角点检测是一种特征提取 ...
- Harris角点
1. 不同类型的角点 在现实世界中,角点对应于物体的拐角,道路的十字路口.丁字路口等.从图像分析的角度来定义角点可以有以下两种定义: 角点可以是两个边缘的角点: 角点是邻域内具有两个主方向的特征点: ...
- Harris角点(转载)
1. 不同类型的角点 在现实世界中,角点对应于物体的拐角,道路的十字路口.丁字路口等.从图像分析的角度来定义角点可以有以下两种定义: 角点可以是两个边缘的角点: 角点是邻域内具有两个主方向的特征点: ...
- 【OpenCV十六新手教程】OpenCV角检测Harris角点检测
本系列文章由@浅墨_毛星云 出品.转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/29356187 作者:毛星云(浅墨) ...
- opencv-角点检测之Harris角点检测
转自:https://blog.csdn.net/poem_qianmo/article/details/29356187 先看看程序运行截图: 一.引言:关于兴趣点(interest point ...
- Vulkan移植GpuImage(二)Harris角点检测与导向滤波
Harris角点检测 UI还是用的上次扣像的,只有前后置可以用,别的没有效果,只看实现就好. 相应源码 在实现之前,我先重新整理编译glsl的生成工具,如Harris角点检测中间计算过程需要针对rgb ...
- Harris角点检测算法优化
Harris角点检测算法优化 一.综述 用 Harris 算法进行检测,有三点不足:(1 )该算法不具有尺度不变性:(2 )该算法提取的角点是像素级的:(3 )该算法检测时间不是很令人满意. 基于以上 ...
随机推荐
- 【Python】我的第一个豆瓣短评爬虫
写在开头 豆瓣上有着大量的影视剧的评论,所以说,要是想要实现对广大人民群众的观点的分析,对一部片子的理解,综合来看大家的评论是很有必要的.而短评作为短小精干的快速评论入口,是值得一谈的. 所以先要实现 ...
- 如何将/etc/issue文件中的内容转换为大写后保存至/tmp/issue.out文件中
cat /etc/issue|tr '[:lower:]' [:upper:] >> /tmp/issue.out
- [Vim] 01 凡人操作
历史评价 编辑器之神 一个凡人的自我修养 成神是不可能成神的,只能是先入个门,然后一点一点学 Vim 官网 三种模式 插入模式(注意看光标) 命令模式(注意看光标) 编辑模式(注意看光标) 其实还有一 ...
- go net库
1 使用Listen函数创建一个server ln, err := net.Listen("tcp", ":8080") if err != nil { // ...
- HDU 1043 Eight 八数码问题 A*算法(经典问题)
HDU 1043 Eight 八数码问题(经典问题) 题意 经典问题,就不再进行解释了. 这里主要是给你一个状态,然后要你求其到达\(1,2,3,4,5,6,7,8,x\)的转移路径. 解题思路 这里 ...
- Square HDU 1518 搜索
Square HDU 1518 搜索 题意 原题链接 给你一定若干个木棒,让你使用它们组成一个四边形,要求这些木棒必须全部使用. 解题思路 木棒有多种组合方式,使用搜索来进行寻找,这里需要进行优化,不 ...
- [LeetCode] 116. 填充每个节点的下一个右侧节点指针
题目链接 : https://leetcode-cn.com/problems/populating-next-right-pointers-in-each-node/ 题目描述: 给定一个完美二叉树 ...
- vue-sticky组件详解
sticky简介 sticky的本意是粘的,粘性的,使用其进行的布局被称为粘性布局. sticky是position属性新推出的值,属于CSS3的新特性,常用与实现吸附效果. 设置了sticky布局的 ...
- GridView做加
原文:http://www.cnblogs.com/insus/archive/2012/09/22/2697862.html 下面是Insus.NET实现演示: CObj.cs代码: using S ...
- setTimeout、Promise、Async/Await 的执行顺序
问题描述:以下这段代码的执行结果 async function async1() { console.log('async1 start'); await async2(); console.log( ...