论文学习笔记 - Classifification of Hyperspectral and LiDAR Data Using Coupled CNNs
Classifification of Hyperspectral and LiDAR Data Using Coupled CNNs
来源:IEEE TGRS 2020
Abstract
本篇论文的主要工作就是基于信息融合的分类任务。
在这篇论文中,作者通过使用两个耦合的CNN,提出一种融合高光谱和LiDAR数据的框架。设计一个CNN从高光谱数据中了解光谱空间特征,另一个则用于捕获来自LiDAR数据。它们都由三个卷积层组成,最后两个卷积层通过参数共享策略。在融合阶段,特征级融合和决策级融合方法同时用于集成这些充足的异质特征。对于特征级融合,评估了三种不同的融合策略,包括串联策略,最大化策略和求和策略。对于决策级融合,加权采用求和策略,确定权重通过每个输出的分类精度。
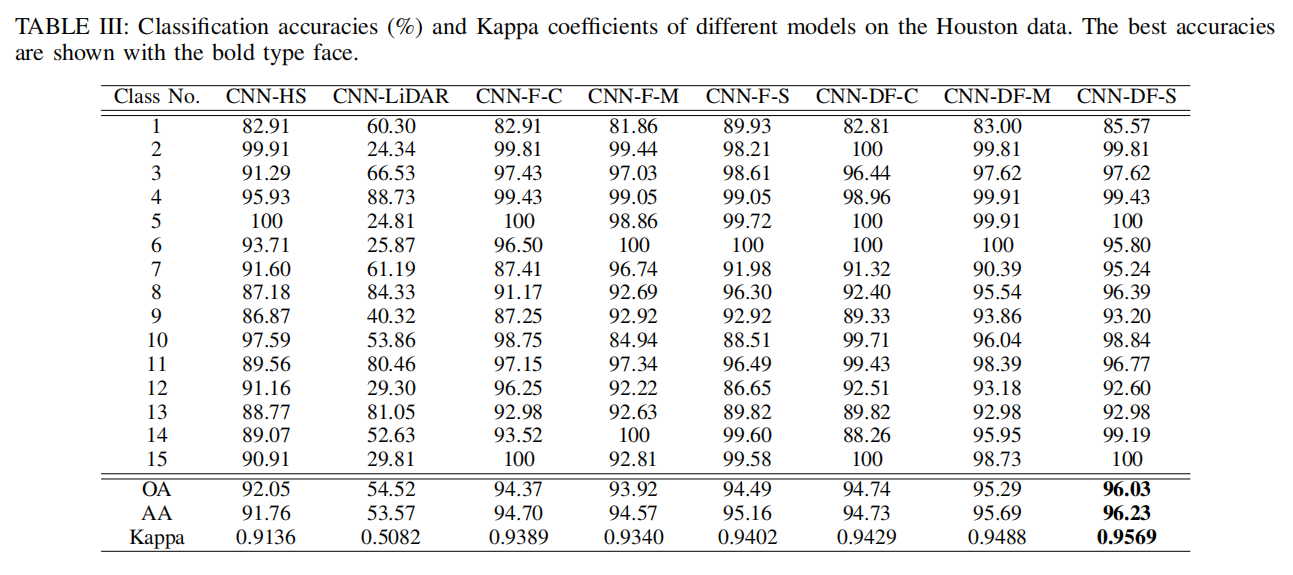
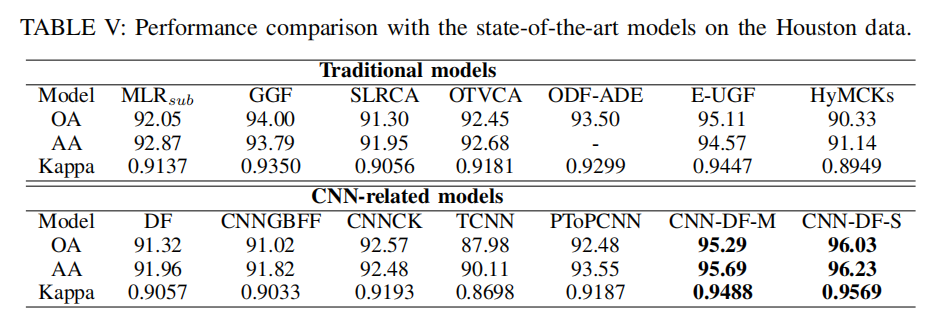
提出的模型根据在美国休斯顿获得的城市数据集进行评估,还有在意大利Trento农村地区捕获的数据。在休斯顿数据中,作者的模型可以达到新记录,整体精度为96.03%。在Trento数据上,其总体精度为99.12%。这些结果充分证明了作者提出的模型的有效性。
INTRODUCTION
文中模型的数据源是两幅异质图像——高光谱图像(HSI)和激光雷达(LiDAR)图像。
HSI图像相比MSI具有更丰富的光谱信息,但是对于同一材质的物体区分性较弱,他们具有相似的光谱回应。不同于HSI,LiDAR可以记录物体的海拔信息,能够为HSI提供补充,二者优势互补。
例如:区域中的楼房和道路由同样的混凝土结构组成,HSI图像很难区分二者之间的差别,但是LiDAR图像则可以准确区分出楼房和道路,因为他们有不同的高度。相反,LiDAR无法区分两条用不同材料(沥青和混凝土)组成的道路,而可以用HSI。因此,融合高光谱和LiDAR数据是一种很有前途的方案,其性能已经得到了验证。
METHODOLOGY
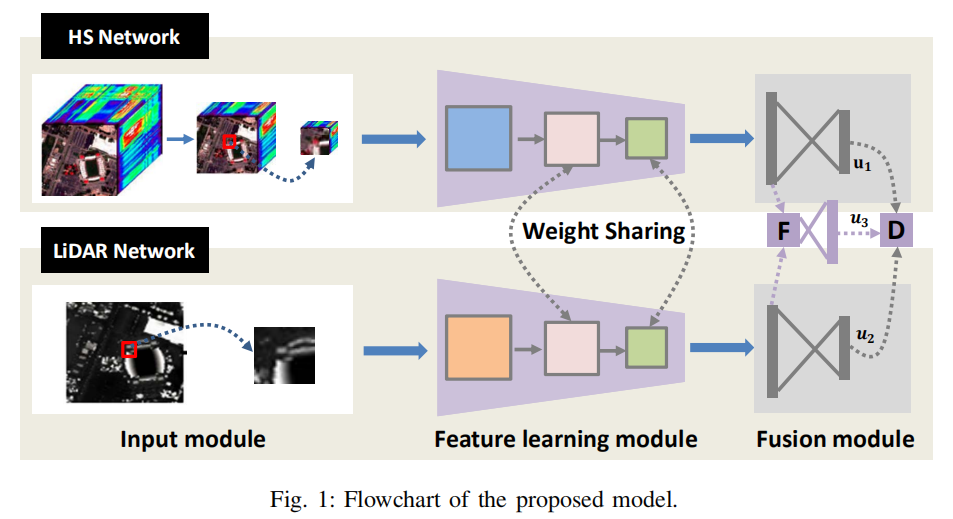
作者提出的模型主要包括两个网络:用于光谱空间特征学习的HSI网络
和用于海拔特征学习的LiDAR网络。它们每个都包含一个输入模块,一个特征学习模块和融合模块,如上图所示。在特征学习模块中,输入的HSI图像和LiDAR图像分别通过一个三层的网络结构进行特征提取,三层网络结构中的后两个卷积层权值共享。权值共享能够减少网络参数,而且有利于两个分支统一优化。特征提取后则进入信息的融合模块,在融合模块中,构造了三个分类器,每个CNN都有一个输出层,它们的融合特征也具有输出层。
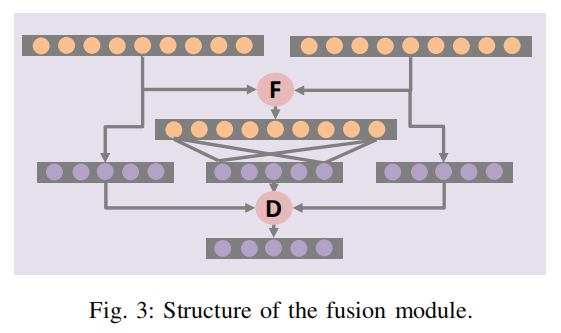
如图2所示,两组图像特征首先通过特征级融合 \(F\) 获得特征级融合特征\(F3=F1+F2\) 或者 \(F3=max(F1,F2)\),特征级融合可以采用逐元素相加或者Max函数。然后对上述 \(F1,F2,F3\) 分别以下操作:
\]
然后文中使用决策级融合 \(D\) 获得最终的融合特征:\(O=F1\odot y1+F2\odot y2+F3\odot y3\),\(\odot\) 为加权操作。
然后 \(L1\) 表示HSI图像(\(y1\))的交叉熵损失,\(L2\)表示LiDAR图像(\(y2\))的交叉熵损失。\(L3\)表示融合信息(\(O\))的交叉熵损失。所以最终的损失函数为:
\]
EXPERIMENTS

CONCLUSIONS
在将来需要探索更强大的邻近提取方法,因为当前的分类图仍然存在过度平滑的问题。
论文学习笔记 - Classifification of Hyperspectral and LiDAR Data Using Coupled CNNs的更多相关文章
- 论文学习笔记 - 高光谱 和 LiDAR 融合分类合集
A³CLNN: Spatial, Spectral and Multiscale Attention ConvLSTM Neural Network for Multisource Remote Se ...
- Apache Calcite 论文学习笔记
特别声明:本文来源于掘金,"预留"发表的[Apache Calcite 论文学习笔记](https://juejin.im/post/5d2ed6a96fb9a07eea32a6f ...
- Lasso估计论文学习笔记(一)
最近课程作业让阅读了这篇经典的论文,写篇学习笔记. 主要是对论文前半部分Lasso思想的理解,后面实验以及参数估计部分没有怎么写,中间有错误希望能提醒一下,新手原谅一下. 1.整体思路 作者提出了一种 ...
- Raft论文学习笔记
先附上论文链接 https://pdos.csail.mit.edu/6.824/papers/raft-extended.pdf 最近在自学MIT的6.824分布式课程,找到两个比较好的githu ...
- 论文学习笔记--无缺陷样本产品表面缺陷检测 A Surface Defect Detection Method Based on Positive Samples
文章下载地址:A Surface Defect Detection Method Based on Positive Samples 第一部分 论文中文翻译 摘要:基于机器视觉的表面缺陷检测和分类可 ...
- QA问答系统,QA匹配论文学习笔记
论文题目: WIKIQA: A Challenge Dataset for Open-Domain Question Answering 论文代码运行: 首先按照readme中的提示安装需要的部分 遇 ...
- 【Python学习笔记】Coursera课程《Python Data Structures》 密歇根大学 Charles Severance——Week6 Tuple课堂笔记
Coursera课程<Python Data Structures> 密歇根大学 Charles Severance Week6 Tuple 10 Tuples 10.1 Tuples A ...
- JMeter学习笔记(九) 参数化2--CSV Data Set Config
2.CSV Data Set Config 1)添加 CSV Data Set Confi 2)配置CSV Data Set Config 3)添加HTTP请求,引用参数,格式 ${} 4)执行HTT ...
- JMeter学习笔记(十一) 关于 CSV Data Set Config 的 Sharing mode 对取值的影响
关于 CSV Data Set Config 的一些介绍之前已经梳理过了,可以参考: https://www.cnblogs.com/xiaoyu2018/p/10184127.html . 今天主要 ...
随机推荐
- Java Object类方法解析
Java Object类方法解析 在Java中Object是所有类的父类,任何类都默认继承Object,其提供的方法主要有以下几种: registerNatives() hashCode和equale ...
- Jenkins打Docker镜像推送到私有仓库
Jenkins打Docker镜像推送到私有仓库 因为我的Jenkins是安装在群晖NAS中的docker,所以我这边就以Docker安装Jenkins为例 echo '================ ...
- 2020年秋季最新Python详细入门教程!全网最新最全
1. import # -*- coding: utf-8 -*- ## 引入新的包 import turtle import pickle # 文件操作 import tensorflow as t ...
- python中闭包详解
谈谈自己的理解:python中闭包,闭包的实质 闭包这个概念好难理解,身边朋友们好多都稀里糊涂的,稀里糊涂的林老冷希望写下这篇文章能够对稀里糊涂的伙伴们有一些帮助~ 请大家跟我理解一下,如果在一个 ...
- 使用implicitly demo
泛型: Context Bounds // //定义一个隐式值, 这个值不能少, 要不找不到比较的对象 implicit val personCompartor = new Ordering[Per ...
- eureka集群的搭建
本次将会创建三个注册中心和一个客户端进行集群,架构图如下: 修改本机hosts文件,创建三个域名: 代码结构如图: 由于三个注册中心结构都是一样的,区别在于配置文件: #注册中心(eureka-ser ...
- Spring系列之事务的控制 注解实现+xml实现+事务的隔离等级
Spring系列之事务的控制 注解实现+xml实现 在前面我写过一篇关于事务的文章,大家可以先去看看那一篇再看这一篇,学习起来会更加得心应手 链接:https://blog.csdn.net/pjh8 ...
- 初识 Istio - 服务网格管理工具
What is a service mesh(服务网格)? 微服务在国内流行已经多年了,大多数公司选择了基于容器化技术( Docker )以及容器编排管理平台 ( Kubernetes )落地微服务 ...
- Batch批处理 间断向EXE发送参数
参考:https://blog.csdn.net/wjz1029/article/details/45044033 找了很久的一种方法: 怎样向一个EXE 发送一个参数,得到反馈后,再向EXE发送一个 ...
- matlab中reshape 重构数组
来源:https://ww2.mathworks.cn/help/matlab/ref/reshape.html?searchHighlight=reshape&s_tid=doc_srcht ...