Neural Style论文笔记+源码解析
引言
前面在Ubuntu16.04+GTX1080配置TensorFlow并实现图像风格转换中介绍了TensorFlow的配置过程,以及运用TensorFlow实现图像风格转换,主要是使用了文章A Neural Algorithm of Artistic Style中的方法,今天,我将主要对这篇文章进行解读,并对基于TensorFlow版本的Neural Style开源代码进行解析。
论文地址:A Neural Algorithm of Artistic Style
源码地址:Neural Style in TensorFlow
A Neural Algorithm of Artistic Style
任意一幅画,在人的眼中可以分为两个部分,一是画的具体内容(Content),如人物、山水、建筑等等,这是很实在的东西;二是绘画的风格(Style),这却是很抽象的东西,这和艺术家的手法、使用的绘画材料以及绘画习惯都有很大的关系。而在计算机中,这仅仅是一些像素点(pixel)而已。这篇文章的key finding是the representations of content and style in the Convolutional Neural Network are separable,即,我们不仅仅可以用深度学习来提取图像的特征,同时还可以将图像的Content和Style分隔开来。
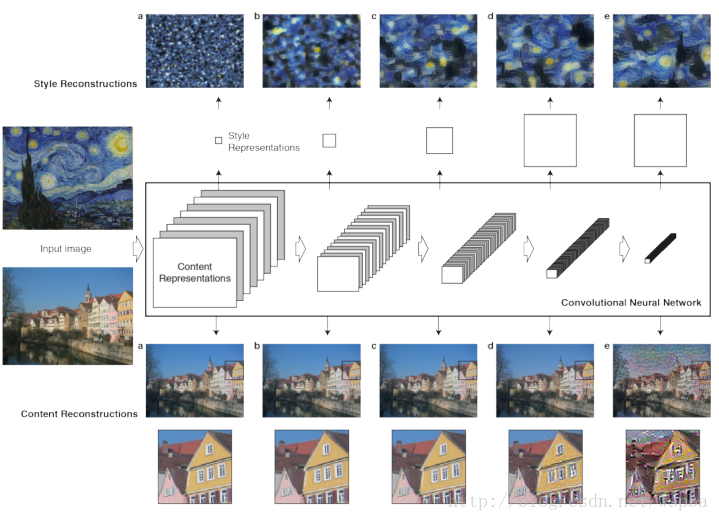
上图即代表了这篇文章的整体框架。
这里的CNN模型使用的是pre-trained的VGG-16模型。
主要包含两个部分:
Content Reconstruction:将图像输入到CNN模型中,使用不同的layer提取到的feature maps来对输入图像进行reconstruct。上图中使用了VGG的‘conv1_1’(a), ‘conv2_1’(b), ‘conv3_1’(c), ‘conv4_1’(d) 和‘conv5_1’(e)的feature maps来重构原始图像。作者在文中说,使用低层的特征能够很好的对原始图像的像素值进行重构(a,b,c),而使用高层的特征来重构的时候detailed pixel出现了丢失,但是图像中的high-level content却保留了下来(d,e),因此认为高层的特征能够更好的对图像的content进行重构。
Style Reconstruction:Style 的重构比Content复杂的多,作者提出使用某一层不同filter的响应之间的correlations来代表该层提取到的texture information,然后来对Style进行重构。上图中使用了VGG的
‘conv1_1’(a), ‘conv1_1’+‘conv2_1’(b), ‘conv1_1’+‘conv2_1’ +‘conv3_1’(c),‘conv1_1’+‘conv2_1’+‘conv3_1’+‘conv4_1’(d), ‘conv1_1’+‘conv2_1’+‘conv3_1’+‘conv4_1’+‘conv5_1’(e)的texture information来进行重构。作者表示使用多层的feature correlations来重构的Style会在各个不同的尺度上更加匹配图像本身的style,忽略场景的全局信息。
基于以上,作者提出了本文的主要工作:finding an image that simultaneously matches the content representation of the photograph and the style representation of the artwork,即将一幅画的Style和另一幅话的Content进行融合,来证明作者的观点。
假设某一层得到的响应是Fl∈RNl∗MlFl∈RNl∗Ml,其中NlNl为l层filter的个数,MlMl为filter的大小。FlijFijl表示的是第l层第i个filter在位置j的输出。
p⃗ p→代表提供Content的图像,x⃗ x→表示生成的图像,PlPl和FlFl分别代表它们对于l层的响应,因此l层的Content Loss:

上面我们提到了,某一层的Style可以用Gl∈RNl∗NlGl∈RNl∗Nl来表示,其中Glij=∑kFlik∗FljkGijl=∑kFikl∗Fjkl,即不同filter响应的内积。
a⃗ a→代表提供Style的图像,x⃗ x→表示生成的图像,AlAl和GlGl分别代表它们对于l层的Style,因此l层的Style Loss: 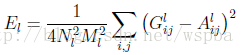
文章中作者使用了多层来表达Style,所以总的Style Loss为: 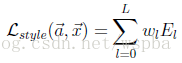
定义好了两个Loss之后,就利用优化方法来最小化总的Loss: 
其中的αα和ββ分别代表了对Content和Style的侧重,文中作者也对α/βα/β取值的效果进行了实验。
最终迭代出来的x⃗ x→既具有p⃗ p→的Content,同时也具有a⃗ a→的Style。实验结果也证明了作者文中方法的有效性。

Neural Style in TensorFlow
TensorFlow版本的源码主要包含了三个文件:neural_style.py, stylize.py和 vgg.py。
neural_style.py:外部接口函数,定义了函数的主要参数以及部分参数的默认值,包含对图像的读取和存贮,对输入图像进行resize,权值分配等操作,并将参数以及resize的图片传入stylize.py中。
stylize.py:核心代码,包含了训练、优化等过程。
vgg.py:定义了网络模型以及相关的运算。
以下主要对stylize.py中的相关代码进行解析。
shape = (1,) + content.shape
style_shapes = [(1,) + style.shape for style in styles]- 1
- 2
content.shape是三维(height, width, channel),这里将维度变成(1, height, width, channel)为了与后面保持一致。
# compute content features in feedforward mode
g = tf.Graph() #创建图
with g.as_default(), g.device('/cpu:0'), tf.Session() as sess:
image = tf.placeholder('float', shape=shape)
net, mean_pixel = vgg.net(network, image)
content_pre = np.array([vgg.preprocess(content, mean_pixel)])
content_features[CONTENT_LAYER] = net[CONTENT_LAYER].eval(feed_dict={image: content_pre})- 1
- 2
- 3
- 4
- 5
- 6
- 7
首先创建一个image的占位符,然后通过eval()的feed_dict将content_pre传给image,启动net的运算过程,得到了content的feature maps。
# compute style features in feedforward mode
for i in range(len(styles)):
g = tf.Graph()
with g.as_default(), g.device('/cpu:0'), tf.Session() as sess:
image = tf.placeholder('float', shape=style_shapes[i])
net, _ = vgg.net(network, image)
style_pre = np.array([vgg.preprocess(styles[i], mean_pixel)])
for layer in STYLE_LAYERS:
features = net[layer].eval(feed_dict={image: style_pre})
features = np.reshape(features, (-1, features.shape[3]))
gram = np.matmul(features.T, features) / features.size
style_features[i][layer] = gram- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
由于style图像可以输入多幅,这里使用for循环。同样的,将style_pre传给image占位符,启动net运算,得到了style的feature maps,由于style为不同filter响应的内积,因此在这里增加了一步:gram = np.matmul(features.T, features) / features.size,即为style的feature。
# make stylized image using backpropogation
with tf.Graph().as_default():
if initial is None:
noise = np.random.normal(size=shape, scale=np.std(content) * 0.1)
initial = tf.random_normal(shape) * 0.256
else:
initial = np.array([vgg.preprocess(initial, mean_pixel)])
initial = initial.astype('float32')
image = tf.Variable(initial)
net, _ = vgg.net(network, image)
# content loss
content_loss = content_weight * (2 * tf.nn.l2_loss(
net[CONTENT_LAYER] - content_features[CONTENT_LAYER]) / content_features[CONTENT_LAYER].size)
# style loss
style_loss = 0
for i in range(len(styles)):
style_losses = []
for style_layer in STYLE_LAYERS:
layer = net[style_layer]
_, height, width, number = map(lambda i: i.value, layer.get_shape())
size = height * width * number
feats = tf.reshape(layer, (-1, number))
gram = tf.matmul(tf.transpose(feats), feats) / size
style_gram = style_features[i][style_layer]
style_losses.append(2 * tf.nn.l2_loss(gram - style_gram) / style_gram.size)
style_loss += style_weight * style_blend_weights[i] * reduce(tf.add, style_losses)
# total variation denoising
tv_y_size = _tensor_size(image[:,1:,:,:])
tv_x_size = _tensor_size(image[:,:,1:,:])
tv_loss = tv_weight * 2 * (
(tf.nn.l2_loss(image[:,1:,:,:] - image[:,:shape[1]-1,:,:]) /
tv_y_size) +
(tf.nn.l2_loss(image[:,:,1:,:] - image[:,:,:shape[2]-1,:]) /
tv_x_size))
# overall loss
loss = content_loss + style_loss + tv_loss- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
image = tf.Variable(initial)初始化了一个TensorFlow的变量,即为我们需要训练的对象。注意这里我们训练的对象是一张图像,而不是weight和bias。接下来定义了Content Loss和Style Loss,结合文中的公式很容易看懂,在代码中,还增加了total variation denoising,因此总的loss = content_loss + style_loss + tv_loss。
# optimizer setup
train_step = tf.train.AdamOptimizer(learning_rate).minimize(loss)- 1
- 2
创建train_step,使用Adam优化器,优化对象是上面的loss。
# optimization
best_loss = float('inf')
best = None
with tf.Session() as sess:
sess.run(tf.initialize_all_variables())
for i in range(iterations):
last_step = (i == iterations - 1)
print_progress(i, last=last_step)
train_step.run()
if (checkpoint_iterations and i % checkpoint_iterations == 0) or last_step:
this_loss = loss.eval()
if this_loss < best_loss:
best_loss = this_loss
best = image.eval()
yield (
(None if last_step else i),
vgg.unprocess(best.reshape(shape[1:]), mean_pixel)
)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
优化过程,通过迭代使用train_step来最小化loss,最终得到一个best,即为训练优化的结果。
总的来说,TensorFlow是一个效率很高、功能很强大的工具,代码也并不是很难看懂,本人对TensorFlow并不是很熟悉,还需要对它的内部函数以及运行机制更深入的了解,因此这也当做是一个学习的过程,上述如果有任何不对的地方,也希望大家批评指正。
Neural Style论文笔记+源码解析的更多相关文章
- AMCL论文及源码解析--参数(持续更新中)
整理内容来自:http://wiki.ros.org/amcl 1.AMCL订阅的节点: scan (sensor_msgs/LaserScan):激光数据 tf (tf/tfMessage):各种转 ...
- [源码解析] PyTorch分布式优化器(1)----基石篇
[源码解析] PyTorch分布式优化器(1)----基石篇 目录 [源码解析] PyTorch分布式优化器(1)----基石篇 0x00 摘要 0x01 从问题出发 1.1 示例 1.2 问题点 0 ...
- [源码解析] PyTorch分布式优化器(2)----数据并行优化器
[源码解析] PyTorch分布式优化器(2)----数据并行优化器 目录 [源码解析] PyTorch分布式优化器(2)----数据并行优化器 0x00 摘要 0x01 前文回顾 0x02 DP 之 ...
- [源码解析] PyTorch分布式优化器(3)---- 模型并行
[源码解析] PyTorch分布式优化器(3)---- 模型并行 目录 [源码解析] PyTorch分布式优化器(3)---- 模型并行 0x00 摘要 0x01 前文回顾 0x02 单机模型 2.1 ...
- [源码解析] PyTorch 分布式(15) --- 使用分布式 RPC 框架实现参数服务器
[源码解析] PyTorch 分布式(15) --- 使用分布式 RPC 框架实现参数服务器 目录 [源码解析] PyTorch 分布式(15) --- 使用分布式 RPC 框架实现参数服务器 0x0 ...
- [源码解析] PyTorch 分布式(10)------DistributedDataParallel 之 Reducer静态架构
[源码解析] PyTorch 分布式(10)------DistributedDataParallel之Reducer静态架构 目录 [源码解析] PyTorch 分布式(10)------Distr ...
- [源码解析] PyTorch 分布式(11) ----- DistributedDataParallel 之 构建Reducer
[源码解析] PyTorch 分布式(11) ----- DistributedDataParallel 之 构建Reducer 目录 [源码解析] PyTorch 分布式(11) ----- Dis ...
- [源码解析] PyTorch 分布式(12) ----- DistributedDataParallel 之 前向传播
[源码解析] PyTorch 分布式(12) ----- DistributedDataParallel 之 前向传播 目录 [源码解析] PyTorch 分布式(12) ----- Distribu ...
- [源码解析] PyTorch 分布式(13) ----- DistributedDataParallel 之 反向传播
[源码解析] PyTorch 分布式(13) ----- DistributedDataParallel 之 反向传播 目录 [源码解析] PyTorch 分布式(13) ----- Distribu ...
随机推荐
- 脑图和MarkDown
使用脑图整理前端体系 根据以下网址整理 http://web.jobbole.com/84062/ http://naotu.baidu.com/ 学习MarkDown语法格式 (一) 标题 在首行插 ...
- ADO学途 one day
博主在第一个demo的困苦中,略得一些见解,需要的伙伴可以get下 刚开始先创建一个程序的前端,这样对自己要实现的功能有一个直观的了解.分三 步:首先1.创建一个windows窗体.拖控件使程序接近真 ...
- php删除文件
unlink() 函数删除文件. 若成功,则返回 true,失败则返回 false. unlink里的参数需要文件的绝对路径
- Linux对外提供服务 网络操作 端口操作 1.开启服务监听端口 2.设置防火墙,放行访问端口的包 iptables&netfilter 四表五链和通堵策略
主题: Linux服务器上软件提供服务 1.网络操作 2.端口操作 1.网络操作 本机必须能够ping通目标主机(本地虚拟机或者远程主机) 2.端口操作 1.开启服务监听端口 2.设置防火墙,放行访问 ...
- struts2.5+框架使用通配符与动态方法
概述:struts2.5以后加强了安全性,下面就是安全配置引发的问题 通配符: 在学习struts框架时经常会使用到通配符调用方法,如下: <package name="usercru ...
- MySQL 的视图、触发器、事务、存储过程、函数
MySQL 的视图.触发器.事务.存储过程.函数 阅读目录 一 视图 二 触发器 三 事务 四 存储过程 五 函数 六 流程控制 一 视图 视图是一个虚拟表(非真实存在),其本质是[根据SQL语句 ...
- Ocelot实现API网关服务
NET Core微服务之基于Ocelot实现API网关服务 https://www.cnblogs.com/edisonchou/p/api_gateway_ocelot_foundation_01. ...
- MapReduce作业的执行流程
MapReduce任务执行总流程 一个MapReduce作业的执行流程是:代码编写 -> 作业配置 -> 作业提交 -> Map任务的分配和执行 -> 处理中间结果 -> ...
- Python网络编程中的服务器架构(负载均衡、单线程、多线程和同步、异步等)
这篇文章主要介绍服务器架构. 网络服务需要面对两个挑战. 第一个问题是核心挑战,要编写出能够正确处理请求并构造合适响应的代码. 第二个挑战是如何将网络代码部署到随系统自动启动的Windows服务或者是 ...
- Bootstrap下拉菜单相关
1.实现普通下拉菜单:.dropdown>button.dropdown-toggle[data-toggle="dropdown"]+ul.dropdown-menu; 2 ...