1. 功能简介
栅格数据前置过滤是在渲染之前对内存中的数据根据特定的规则进行处理,然后再进行数据渲染。本示例以定标为例进行示例代码编写。
定标(校准)是将遥感器所得的测量值变换为绝对亮度或变换为与地表反射率、表面温度等物理量有关的相对值的处理过程。或者说,遥感器定标就是建立遥感器每个探测器输出值与该探测器对应的实际地物辐射亮度之间的定量关系。它是遥感定量化的前提。
栅格后置过滤是对渲染过程的控制。本示例以曲线调整为例进行示例代码编写
灰度拉伸又叫对比度拉伸,它是最基本的一种灰度变换,使用的是最简单的分段线性变换函数,它的主要思想是提高图像处理时灰度级的动态范围。
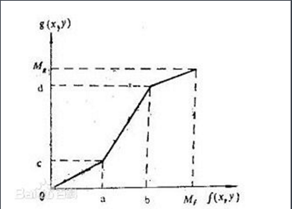
[灰度拉伸函数]
2. 功能实现说明
2.1 实现思路及原理说明
本示例代码以FY-4A数据的定标为例,已经运用静止卫星数据读取方法,读取NOMChannel13波段数据为tiff。
|
前置过滤(以定标为例)
|
|
第一步
|
初始化前置过滤回调函数。
|
|
第二步
|
实现定标算法。
|
|
第三步
|
实例化自定义前置过滤对象。
|
|
第四步
|
为前置过滤对象设置前置过滤算法
|
|
第五步
|
接口转换
|
|
第六步
|
添加前置过滤器
|
|
后置过滤(以曲线拉伸为例)
|
|
第一步
|
初始化拉伸结果表。
|
|
第二步
|
添加折点。
|
|
第三步
|
根据折点,计算结果拉伸表。
|
|
第四步
|
实例化后置过滤器
|
|
第五步
|
设置对照表
|
|
第六步
|
接口转换,添加后置过滤条件
|
2.2 核心接口与方法
|
接口/类
|
方法
|
说明
|
|
前置过滤
|
|
Carto.PreFilterFunCallback
|
|
|
|
Carto.ICustomerPreRasterFilter
|
SetPreFilterFun
|
设置前置过滤算法
|
|
Carto.IrasterFilterProps
|
AddPreRasterFilter
|
添加前置过滤
|
|
后置过滤
|
|
Carto. ILutAfterFilter
|
SetLut
|
为指定波段设置对照表
|
|
Carto. IRasterFilterProps
|
AddAfterRasterFilter
|
添加后置过滤器
|
2.3 示例代码
|
项目路径
|
百度云盘地址下/PIE示例程序/07图层渲染/12.栅格过滤制
|
|
数据路径
|
百度云盘地址下/PIE示例数据/栅格数据/ FY/FY4A/
|
|
视频路径
|
百度云盘地址下/PIE视频教程/07图层渲染/12.栅格过滤控制.avi
|
|
示例代码
|
方法(一)
//前置过滤本示例以定标为例
//风云4A数据为例
IRasterLayer rasterLayer = mapControlMain.ActiveView.CurrentLayer as IRasterLayer;
IRasterRender rasterRender = RenderFactory.ImportFromFile(@"C:\Users\zhangyiwei\Desktop\TestData\ICV-BD.xml");
//实例化定标函数
CaliCommon common = new CaliCommon();
string hdfpath = (rasterLayer as ILayer).DataSourcePath;
common.Initialize(hdfpath, "NOMChannel13");
//添加前置过滤
PIE.Carto.ICustomerPreRasterFilter preFilter = new PIE.Carto.CustomerPreRasterFilter();
preFilter.SetPreFilterFun(common.CaliFunCallBack);
IRasterClassifyColorRampRender classRender = rasterRender as IRasterClassifyColorRampRender;
(classRender as IRasterFilterProps).AddPreRasterFilter(preFilter as IPreRasterFilter);
//地图刷新
rasterLayer.Render = rasterRender;
mapControlMain.ActiveView.PartialRefresh(ViewDrawPhaseType.ViewAll);
方法(二)
/// <summary>
/// 定标方法接口
/// </summary>
public interface ICaliFunction
{
/// <summary>
/// 定标回调函数
/// </summary>
PreFilterFunCallback CaliFunCallBack
{
get;
}
/// <summary>
/// 数据定标
/// </summary>
/// <param name="dataNeedCali">原始数据</param>
/// <param name="width">宽度</param>
/// <param name="height">高度</param>
/// <param name="bandCount">波段</param>
/// <returns>定标后数据</returns>
float[] Cali<T>(T[] dataNeedCali, int width, int height, int bandCount);
/// <summary>
/// 定标算法函数
/// </summary>
unsafe bool CaliFilter(IntPtr valuesA, IntPtr valuesB);
}
/// <summary>
/// 风云4A数据的定标方法
/// </summary>
public class CaliCommon : ICaliFunction
{
/// <summary>
/// 定标数据
/// </summary>
private float[] m_DBDatas = null;
/// <summary>
/// 定标数据长度
/// </summary>
private int m_Count = ;
/// <summary>
/// 定标回调函数
/// </summary>
private PreFilterFunCallback m_CaliFunCallBack = null;
/// <summary>
/// 构造函数
/// </summary>
public CaliCommon()
{
}
/// <summary>
/// 定标回调函数
/// </summary>
public PreFilterFunCallback CaliFunCallBack
{
get
{
return m_CaliFunCallBack;
}
}
/// <summary>
/// 初始化定标方法
/// </summary>
/// <param name="strFilePath_HDF">hdf文件路径</param>
/// <param name="chanelName">通道名称</param>
/// <returns></returns>
public bool Initialize(string strFilePath_HDF, string chanelName)
{
string calName = chanelName.Replace("NOM", "CAL");
string calFilePath = System.IO.Path.GetDirectoryName(strFilePath_HDF) + "\\" + calName+".tiff";
IRasterDataset rasterDataset = PIE.DataSource.DatasetFactory.OpenRasterDataset(calFilePath, OpenMode.ReadOnly);
int height = rasterDataset.GetRasterYSize();
m_DBDatas = new float[height];
int[] bandMap = { };
rasterDataset.Read(, , , height, m_DBDatas, , height, PixelDataType.Float32, , bandMap);
(rasterDataset as IDisposable).Dispose();
m_Count = m_DBDatas.Length;
m_CaliFunCallBack = new PreFilterFunCallback(CaliFilter);
GC.KeepAlive(m_CaliFunCallBack);
return true;
}
/// <summary>
/// 数据定标
/// </summary>
/// <param name="dataNeedCali">原始数据</param>
/// <param name="width">宽度</param>
/// <param name="height">高度</param>
/// <param name="bandCount">波段</param>
/// <returns>定标后数据</returns>
public float[] Cali<T>(T[] dataNeedCali, int width, int height, int bandCount)
{
if (dataNeedCali == null || dataNeedCali.Length < )
{
return null;
}
float[] dataCali = new float[width * height * bandCount];
for (int j = ; j < height; j++)
{
for (int i = ; i < width; i++)
{
for (int m = ; m < bandCount; m++)
{
int nIndex = (j * width + i) * bandCount + m;
int value = Convert.ToInt32(dataNeedCali[nIndex]);
if (value < || value >= m_Count)
{
dataCali[nIndex] = ;
}
else
{
dataCali[nIndex] = m_DBDatas[value];
}
}
}
}
return dataCali;
}
/// <summary>
/// 定标算法
/// </summary>
/// <param name="valuesA">定标前</param>
/// <param name="valuesB">定标后</param>
/// <returns></returns>
public unsafe bool CaliFilter(IntPtr valuesA, IntPtr valuesB)
{
if (m_DBDatas == null)
{
return false;
}
IPixelBuffer pixelBuffer = PIE.DataSource.DatasetFactory.ConstructCLRPixelBuffer(valuesA.ToPointer());
int width = pixelBuffer.Width;
int height = pixelBuffer.Height;
int bandCount = pixelBuffer.BandMap.Length;
float[] valuesData = new float[width * height * bandCount];
short* byteValues = (short*)(pixelBuffer.GetData_Ref().ToPointer());
for (int j = ; j < height; j++)
{
for (int i = ; i < width; i++)
{
for (int m = ; m < bandCount; m++)
{
int nIndex = (j * width + i) * bandCount + m;
int value = *(byteValues + nIndex);
if (value < || value >= m_Count)
{
valuesData[nIndex] = ;
}
else
{
valuesData[nIndex] = m_DBDatas[value];
}
}
}
}
pixelBuffer.SetData(PixelDataType.Float32, valuesData);
return true;
}
}
|
2.4 示例截图
(一) 前置过滤
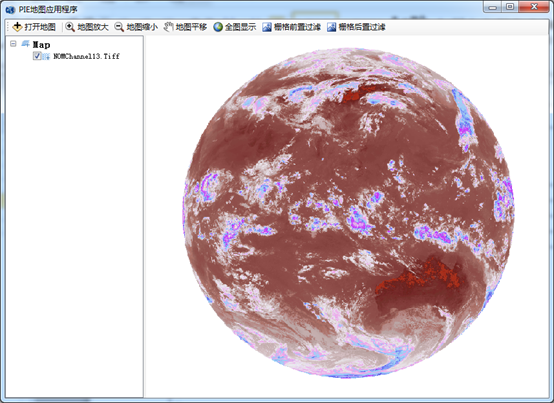
(二) 后置过滤
- PIE SDK过滤
1. 算法功能简介 过滤功能使用斑点分组方法来消除分类文件中被隔离的分类像元,用以解决分类图像中出现的孤岛问题. PIE SDK支持算法功能的执行,下面对过滤算法功能进行介绍. 2. 算法功能实现说明 ...
- PIE SDK栅格增强控制
1. 功能简介 亮度是指发光体(反光体)表面发光(反光)强弱的物理量:对比度指的是一幅图像中明暗区域最亮的白和最暗的黑之间不同亮度层级的测量:透明度是描述光线透过的程度 栅格数据增强控制主要是通过对亮 ...
- PIE SDK 文章目录索引
1.PIE SDK介绍 1.1. PIE软件介绍 1.2. PIE SDK介绍 1.3. PIE支持项目介绍 1.4. PIE.NET-SDK插件式二次开发介绍 1.5. PIE.NET-S ...
- PIE SDK Command&&Tool工具命令一览表
PIE SDK Command&&Tool工具命令一览表 编号 模板 名称(中文) Command&Tool 程序集 备注 1 数据管理 加载栅格数据 PIE.Controls ...
- PIE SDK创建掩膜
1.算法功能简介 图像掩膜(Mask)用选定的图像.图形或物体,对处理的图像(全部或局部)进行遮挡,来控制图像处理的区域或处理过程.掩膜是一种图像滤镜的模板,实用掩膜经常处理的是遥感图像.当提取道 ...
- PIE SDK地图范围设置
1.功能简介 地图范围设置主要就是对图层的地图浏览控制,例如地图的放大.缩小.漫游.全图显示.1:1视图.比例尺等功能,能更好的与地图有一个互动的地图浏览体验.PIE SDK对地图范围设置主要利用IC ...
- PIE SDK地图图层渲染方案管理
1. 功能简介 在数据种类较多.渲染规则复杂的情况下,逐个设置其渲染方式是一件繁琐的工作.PIE SDK提供了一种省力省心的办法, PIE SDK提供栅格和矢量数据渲染方案的打开与保存.能够将配色方案 ...
- PIE SDK专题制图下地图的的操作
1. 功能简介 制图模式和地图模式下用的地图是同一份地图,那么在制图模式下如果需要对地图进行操作(例如地图的拉框放大,缩小),那么该如何操作呢,地图范围视图变化在制图模式下该如何监听呢,下面主要 ...
- PIE SDK与Matlab结合说明文档
1.功能简介 Matlab是三大数学软件之一,它在数学类科技应用软件中在数值计算方面首屈一指.Matlab可以进行矩阵运算.绘制函数和数据.实现算法.创建用户界面.连接其他编程语言的程序等,主要应用于 ...
随机推荐
- c# 常规验证基类
using System;using System.Collections.Generic;using System.Linq;using System.Text.RegularExpressions ...
- zigbee之MAC地址发送
TI cc2530在出厂时候每一个芯片都固化了一个唯一的8个字节的地址,MAC或者IEEE地址. 协调器模块的MAC地址为:0x00124B000716550F(注意自己的是多少!!) 终端的MAC地 ...
- (回文串)leetcode各种回文串问题
题目一:最长连续回文子串. 问题分析:回文串顾名思义表示前后读起来都是一样,这里面又是需要连续的.分析这个问题的结构,可以想到多种方法.暴力解决的方式,2层循环遍历得出各个子串,然后再去判断该子串是否 ...
- ios7 设置status bar风格
How to change status bar style during launch on iOS 7 up vote4down votefavorite When I launch my a ...
- 编写高质量代码改善C#程序的157个建议——建议53:必要时应将不再使用的对象引用赋值为null
建议53:必要时应将不再使用的对象引用赋值为null 在CLR托管的应用程序中,存在一个“根”的概念,类型的静态字段.方法参数.以及局部变量都可以作为“根”的存在(值类型不能作为“根”,只有引用类型的 ...
- WinForm中使用自定义Tooltip控件
private ToolTip tooltipCtr; 构造函数中: 隐藏默认的Tooltip:this.ShowCellToolTips = false; this.tooltipCtr = new ...
- C语言#include的用法
1.#include 命令介绍 #include 命令是预处理命令的一种,预处理命令可以将别的源代码内容插入到所指定的位置:可以标识出只有在特定条件下才会被编译的某一段程序代码: 可以定义类似标识符功 ...
- JMeter Bean Shell
1.什么是bean Shell BeanShell是一种脚本语言,一种完全符合java语法的java脚本语言,并且又拥有自己的一些语法和方法,beanShell是一种松散类型的脚本语言(这点和JS类似 ...
- springMVC 学习笔记(一):springMVC 入门
springMVC 学习笔记(一):spring 入门 什么是 springMVC springMVC 是 spring 框架的一个模块,springMVC 和 spring 无需通过中间整合层进行整 ...
- 【bzoj3601】一个人的数论 莫比乌斯反演+莫比乌斯函数性质+高斯消元
Description Sol 这题好难啊QAQ 反正不看题解我对自然数幂求和那里是一点思路都没有qwq 先推出一个可做一点的式子: \(f(n)=\sum_{k=1}^{n}[(n,k)=1]k^d ...