Opencv学习笔记2:图像模糊作用和方法
一、意义和作用:
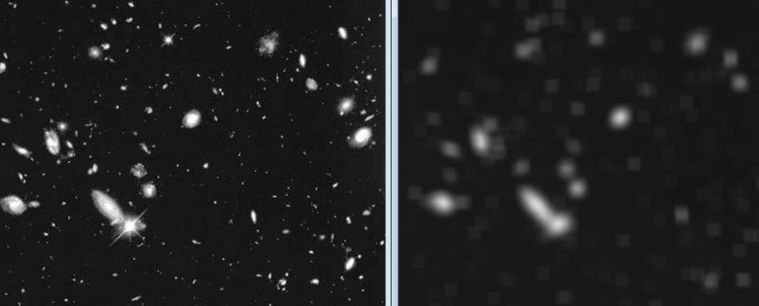
图像的模糊处理就是将图片处理的更加模糊,如下图,左侧是原图,右侧是经过处理之后的图片。
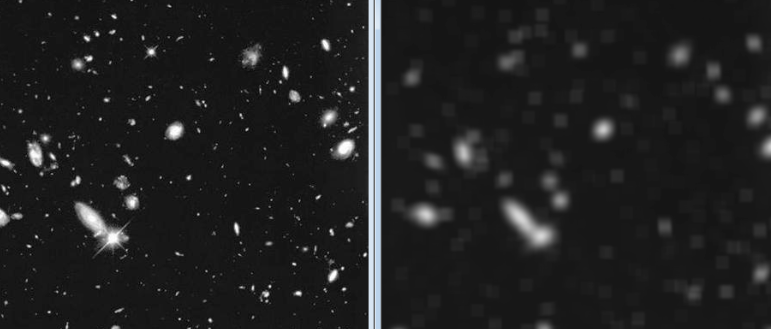
从主观意愿上说,我们希望看到清晰的图像,而不是模糊的图像。所以很多时候我们听说还有一种专门进行模糊图像的操作时,感觉不可思议,这有什么用呢。要知道模糊图像只是处理噪声带来的副作用,并不是我们的目的。图像没有噪声的时候,我们用平滑滤波器去模糊图像干什么呢?还真有一个重要的应用。把上面的图像使用变得更加模糊之后。效果如下:
我们可以看到,相对于原始图像,一些较小的物体已经融入背景,看不到了,有些物体即使能看到,亮度也明显降低。这样,我们用图像模糊将图像中较大的较亮的物体保留了下来,而其它的物体则消除了。我们进一步通过阈值处理对模糊后的图像进行操作,将最高亮度的25%作为阈值,低于此阈值的赋为0,高于此阈值的赋为255。
经过处理后图片为这样:
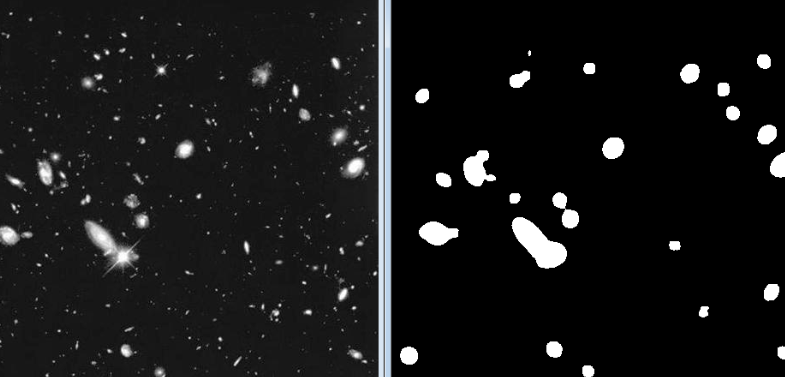
像这样利用阈值函数处理并基于物体亮度来消除某些物体的操作时很典型的。当我们只想得到感兴趣的物体时,通过图像模糊,可以将那些尺寸和亮度较小的物体过滤掉,较大的物体则易于检测。除了降低噪声,这就是图像平滑(模糊)的另一个重要应用:目标提取。
二、模糊方法
模糊操作时图像处理中最简单和常用的操作之一,使用该操作的原因之一就为了给图像预处理时减低噪声。
使用模糊操作的背后是数学的卷积计算: 
其中权重核h(k,l)h(k,l)为“滤波系数”。上面的式子可以简记为: 
通常这些卷积算子计算都是线性操作,所以又叫线性滤波。
均值滤波(归一化滤波)
均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标像素为中心的周围8个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。 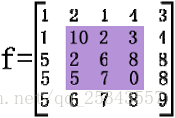
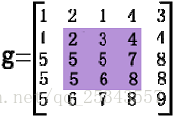
用 3×3 大小模板进行均值滤波。 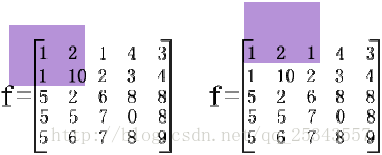
由于图像边框上的像素无法被模板覆盖,所以不做处理。
这当然造成了图像边缘的缺失
以(2,2)像素点为例。 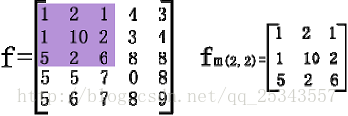
则滤波后的结果为:

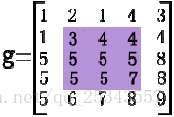
滤波后(2,2)像素点的值由 10 变为 3
最终结果:
OpenCV提供均值滤波API:
void blur(Mat src,Mat dst, Size(xradius,yradius), Point(-1, -1))
代码:
#include <opencv.hpp>
using namespace cv;
int main()
{ Mat srcImage;
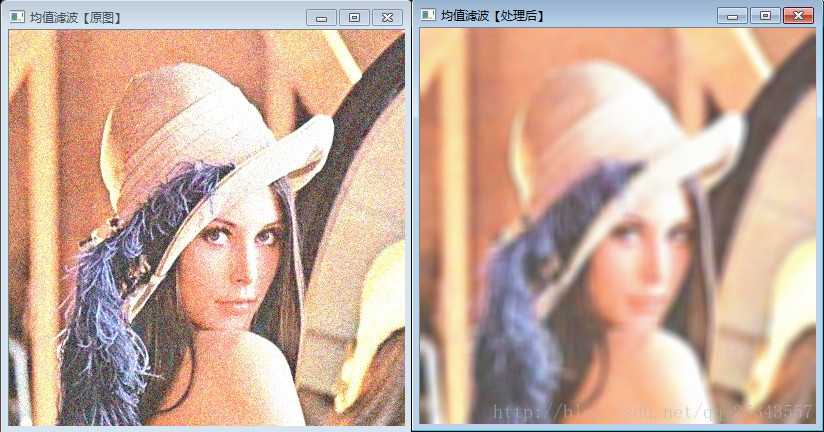
srcImage = imread("d://1.png");
imshow("均值滤波【原图】", srcImage);
Mat dst; // 构造目标类
blur(srcImage, dst, Size(5, 5)); // 进行均值滤波操作
imshow("均值滤波【处理后】", dst);
waitKey();
return 0;
}
效果图:
对于椒盐噪声: 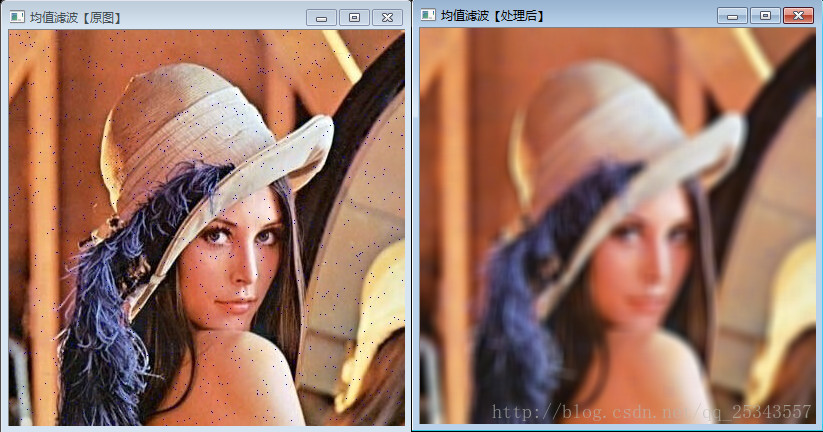
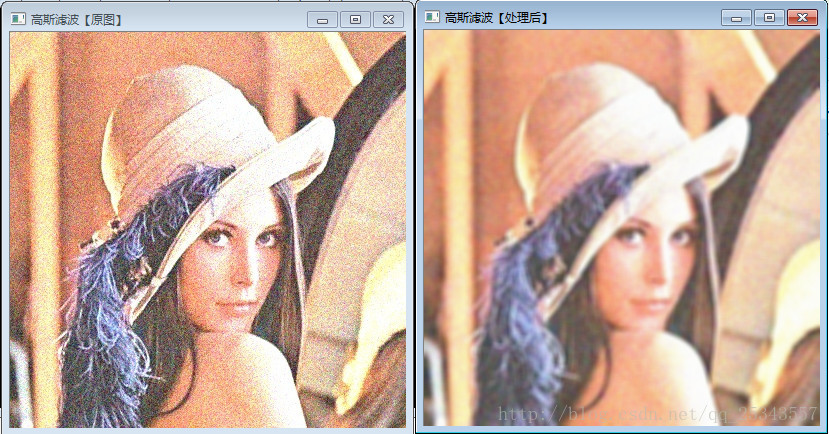
对于高斯噪声:
中值滤波
中值,中间值,将数据从小到大排序后的中间值
用 3×3 大小模板进行中值滤波。
以(2,2)像素点为例。
对模板中的 9 个数进行从小到大排序:1,1,1,2,2,5,6,6,10。中间值为 2.所有,中值滤波后(2,2)位置的值变为 2. 同理对其他像素点。
处理结果:
OpenCV提供中值滤波API:
void medianBlur(InputArray src, OutputArray dst, int ksize)
代码:
#include <opencv.hpp>
using namespace cv;
int main()
{ Mat srcImage;
srcImage = imread("d://1.png");
imshow("均值滤波【原图】", srcImage);
Mat dst; // 构造目标类
medianBlur(srcImage, dst, 3);
//blur(srcImage, dst, Size(5, 5)); // 进行均值滤波操作
imshow("高斯滤波【处理后】", dst);
waitKey();
return 0;
}
处理结果:
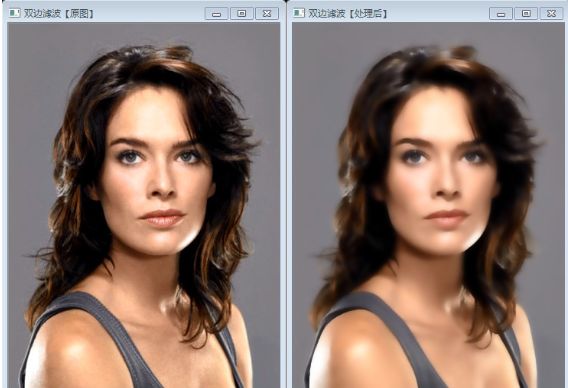
双边滤波
- 均值模糊无法克服边缘像素信息丢失缺陷。原因是均值模糊是基于平均权重。
- 高斯模糊部分克服了该缺陷,但是无法完全避免,因为没考虑到像素值的不同。
- 双边滤波是保留边缘的滤波方法,避免了边缘信息的丢失,保留了图像轮廓不变。
OpenCV提供的API:
void bilateralFilter(InputArray src, OutputArray dst, int d, double sigmaColor, double sigmaSpace, int borderType=BORDER_DEFAULT )
代码:
#include <opencv.hpp>
using namespace cv;
int main()
{
/*
d:计算的半径
sigmaColor:多少差值之内的像素会被计算
sigmaSpace:如果d>0,那么声明无效,否则根据它来计算d值
*/
Mat srcImage;
srcImage = imread("d://1.png");
imshow("双边滤波【原图】", srcImage);
Mat dst; // 构造目标类
bilateralFilter(srcImage, dst, 15, 150, 3);
//medianBlur(srcImage, dst, 3);
//blur(srcImage, dst, Size(5, 5)); // 进行均值滤波操作
imshow("双边滤波【处理后】", dst);
waitKey();
return 0;
}
最终结果:
Opencv学习笔记2:图像模糊作用和方法的更多相关文章
- OpenCV 学习笔记 07 目标检测与识别
目标检测与识别是计算机视觉中最常见的挑战之一.属于高级主题. 本章节将扩展目标检测的概念,首先探讨人脸识别技术,然后将该技术应用到显示生活中的各种目标检测. 1 目标检测与识别技术 为了与OpenCV ...
- OpenCV 学习笔记03 boundingRect、minAreaRect、minEnclosingCircle、boxPoints、int0、circle、rectangle函数的用法
函数中的代码是部分代码,详细代码在最后 1 cv2.boundingRect 作用:矩形边框(boundingRect),用于计算图像一系列点的外部矩形边界. cv2.boundingRect(arr ...
- OpenCV 学习笔记 02 使用opencv处理图像
1 不同色彩空间的转换 opencv 中有数百种关于不同色彩空间的转换方法,但常用的有三种色彩空间:灰度.BRG.HSV(Hue-Saturation-Value) 灰度 - 灰度色彩空间是通过去除彩 ...
- 【opencv学习笔记五】一个简单程序:图像读取与显示
今天我们来学习一个最简单的程序,即从文件读取图像并且创建窗口显示该图像. 目录 [imread]图像读取 [namedWindow]创建window窗口 [imshow]图像显示 [imwrite]图 ...
- OpenCV学习笔记3
OpenCV学习笔记3 图像平滑(低通滤波) 使用低通滤波器可以达到图像模糊的目的.这对与去除噪音很有帮助.其实就是去除图像中的高频成分(比如:噪音,边界).所以边界也会被模糊一点.(当然,也有一些模 ...
- opencv学习笔记(七)SVM+HOG
opencv学习笔记(七)SVM+HOG 一.简介 方向梯度直方图(Histogram of Oriented Gradient,HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子 ...
- opencv学习笔记(三)基本数据类型
opencv学习笔记(三)基本数据类型 类:DataType 将C++数据类型转换为对应的opencv数据类型 OpenCV原始数据类型的特征模版.OpenCV的原始数据类型包括unsigned ch ...
- opencv学习笔记(二)寻找轮廓
opencv学习笔记(二)寻找轮廓 opencv中使用findContours函数来查找轮廓,这个函数的原型为: void findContours(InputOutputArray image, O ...
- opencv学习笔记(一)IplImage, CvMat, Mat 的关系
opencv学习笔记(一)IplImage, CvMat, Mat 的关系 opencv中常见的与图像操作有关的数据容器有Mat,cvMat和IplImage,这三种类型都可以代表和显示图像,但是,M ...
- OpenCV学习笔记(27)KAZE 算法原理与源码分析(一)非线性扩散滤波
http://blog.csdn.net/chenyusiyuan/article/details/8710462 OpenCV学习笔记(27)KAZE 算法原理与源码分析(一)非线性扩散滤波 201 ...
随机推荐
- 【BZOJ】2120: 数颜色 带修改的莫队算法
[题意]给定n个数字,m次操作,每次询问区间不同数字的个数,或修改某个位置的数字.n,m<=10^4,ai<=10^6. [算法]带修改的莫队算法 [题解]对于询问(x,y,t),其中t是 ...
- python学习笔记(十四)之字典
字典:是python中唯一的映射类型,字典中每一项都是由键-值对组成的项.字典中没有索引,只有键和值.键的类型可以是整型,变量或字符串. 创建和访问字典: >>> dict1 = { ...
- AJAX的前世今生与未来
一.通过三个问答来认识一下Ajax 什么是Ajax? Ajax是Asynchronous Javascript And XML的缩写,它是一种技术. Ajax有什么用? 这一技术能够向服务器请求额外的 ...
- docker使用现有容器生成新的镜像
/*运行docker run后 --则进入该容器里了 我们做一些变更,比如安装一些东西 ,然后针对这个容器进行创建新的镜像 */ 基本形式: docker commit -m "change ...
- tf.reduce_sum()_tf.reduce_mean()_tf.reduce_max()
根据官方文档: reduce_sum应该理解为压缩求和,用于降维 tf.reduce_sum(input_tensor,axis=None,keepdims=None,name=None,reduct ...
- Perl6多线程3: Promise start / in / await
创建一个Promise 并自动运行: my $p = Promise.start({say 'Hello, Promise!'}); 如果把代码改成如下, 我们会发现什么也没打印: ;say 'Hel ...
- 初窥ThinkPHP
MVC全称(Model View Controller) Model:模型(可以理解位数据库操作模型) View:视图(视图显示) Controller:(控制器) 简单的说框架就是一个类的集合.集合 ...
- 64_p8
python2-cotyledon-tests-1.6.7-2.fc26.noarch.rpm 12-Feb-2017 10:28 23182 python2-couchdb-1.0-6.fc26.n ...
- 服务器Java环境配置
/* 当要在服务器里搭建Java web项目时, 要先配置好Java需要的环境 */ //jdk [root@localhost ~]# cd /usr/local/src [root@localho ...
- Redis安装和客户端cli常见操作
安装Redis $ wget http://download.redis.io/releases/redis-4.0.6.tar.gz $ tar xzf redis-4.0.6.tar.gz $ c ...