论文解读(GLA)《Label-invariant Augmentation for Semi-Supervised Graph Classification》
论文信息
论文标题:Label-invariant Augmentation for Semi-Supervised Graph Classification
论文作者:Han Yue, Chunhui Zhang, Chuxu Zhang, Hongfu Liu
论文来源:2022,NeurIPS
论文地址:download
论文代码:download
1 Introduction
我们提出了一种图对比学习的标签不变增强策略,该策略涉及到下游任务中的标签来指导对比增强。值得注意的是,我们不生成任何图形数据。相反,我们在训练阶段直接生成标签一致的表示作为增广图。
2 Methodology
2.1 Motivation
数据增强在神经网络训练中起着重要的作用。它不仅提高了学习表示的鲁棒性,而且为训练提供了丰富的数据。
例子:(使用 $50%$ 的标签做监督信息。数据增强:node dropping, edge perturbation, attribute masking, subgraph sampling)
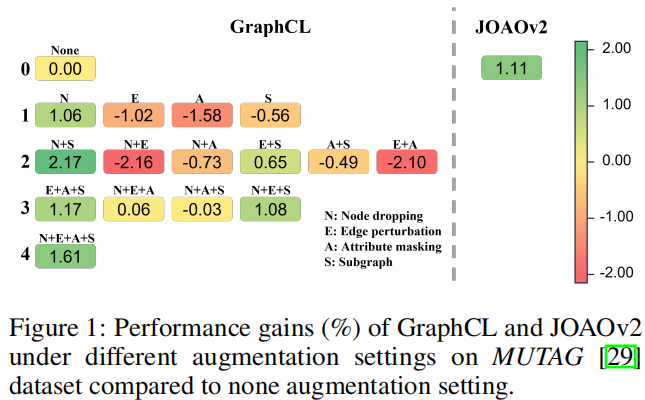
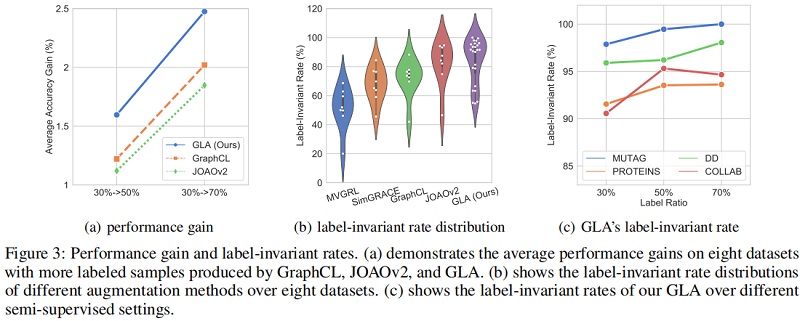
显然有些数据增强策略(或组合)对于模型训练又负面影响。本文进一步使用 MUTAG 中的 $100%$ 标签训练模型,然后以每种数据增强抽样概率 $0.2$ 选择数据增强图,发现 80% 的数据增强图和原始图标签一致,约 $20%$ 的数据增强图和原始图标签不一致。
2.2 Label-invariant Augmentation
整体框架:
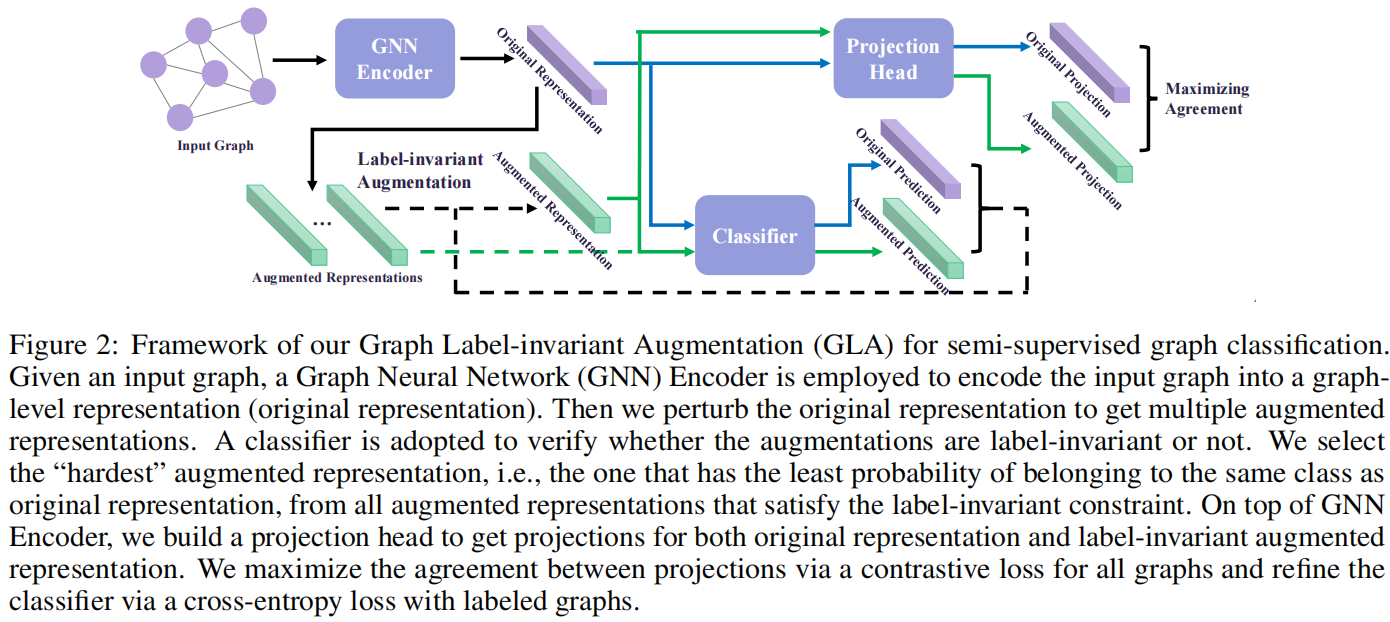
四个组成部分:
- Graph Neural Network Encoder
- Classifier
- Label-invariant Augmentation
- Projection Head
出发点:对于一个有标记的图,我们期望由增强表示预测的标签与地面真实标签相同。
2.2.1 Graph Neural Network Encoder
GCN layer :
其中:
- $G^{(l)}$ denotes the matrix in the l -th layer, and $G^{(0)}=X$
- $\sigma(\cdot)=\operatorname{ReLU}(\cdot)$
池化 (sum):
$H=\operatorname{Pooling}(G)\quad\quad\quad\quad(2)$
2.2.2 Classifier
基于图级表示,我们使用带有参数 $\theta_{C}$ 的全连接层进行预测:
$C^{(l+1)}=\operatorname{Softmax}\left(\sigma\left(C^{(l)} \cdot \theta_{C}^{(l)}\right)\right)\quad\quad\quad\quad(3)$
其中,$C^{(l)}$ 表示第 $l$ 层的嵌入,输入层 $C^{(0)}=H^{O}$ 或 $C^{(0)}=H^{A}$ 分别表示原始表示和增强图表示。实验中,采用了一个 2 层多层感知器,得到了对原始表示 $H^{O}$ 和增强表示 $H^{A}$ 的预测 $C^{O}$ 和 $C^{A}$。
2.2.3 Label-invariant Augmentation
不对图级表示做数据增强,而是在原始图级表示$H^{O}$上做微小扰动得到增强图级表示。
在实验中,首先计算所有图的原始表示的质心,得到每个原始表示与质心之间的欧氏距离的平均值为 $d$,即:
$d=\frac{1}{N} \sum_{i=1}^{N}\left\|H_{i}^{O}-\frac{1}{N} \sum_{j=1}^{N} H_{j}^{O}\right\|\quad\quad\quad\quad(4)$
然后计算增强图表示 $H^{A}$:
$H^{A}=H^{O}+\eta d \Delta\quad\quad\quad\quad(5)$
其中 $\eta$ 缩放扰动的大小,$\Delta$ 是一个随机单位向量。
为实现标签不变增强,每次,随机生成多个扰动,并选择符合标签不变属性的合格候选增强。在这些合格的候选对象中,选择了最困难的一个,即最接近分类器的决策边界的一个,以提高模型的泛化能力。
2.2.4 Projection Head
使用带有参数 $\theta_{P}$ 的全连接层,从图级表示中得到对比学习的投影,如下所示:
$P^{(l+1)}=\sigma\left(P^{(l)} \cdot \theta_{P}^{(l)}\right) \quad\quad\quad\quad(6)$
采用一个 2 层多层感知器,从原始表示 $H^{O}$ 和增广表示 $H^{A}$ 中得到投影 $P^{O}$ 和 $P^{A}$。
2.2.5 Objective Function
目标函数包括对比损失和分类损失。对比损失采用 NT-Xent,但只保留正对部分如下:
$\mathcal{L}_{P}=\frac{-\left(P^{O}\right)^{\top} P^{A}}{\left\|P^{O}\right\|\left\|P^{A}\right\|} \quad\quad\quad\quad(7)$
对于分类损失,采用交叉熵,其定义为:
$\mathcal{L}_{C}=-\sum_{i=1}^{c}\left(Y_{i}^{O} \log P_{i}^{O}+Y_{i}^{O} \log P_{i}^{A}\right) \quad\quad\quad\quad(8)$
其中,$Y^{O}$ 是输入图的标签,$c$ 是图类别的数量。本文只计算带标签的图的 $\mathcal{L}_{C}$。$\text{Classifier}$ 的改进将有助于标签不变的增强,反过来有利于分类器的训练。
结合等式 $\text{Eq.7}$ 和 $\text{Eq.8}$ ,总体目标函数可以写成如下:
$\underset{\Theta}{\text{min}} \quad\mathcal{L}_{P}+\alpha \mathcal{L}_{C}\quad\quad\quad\quad(9)$
3 Experiments
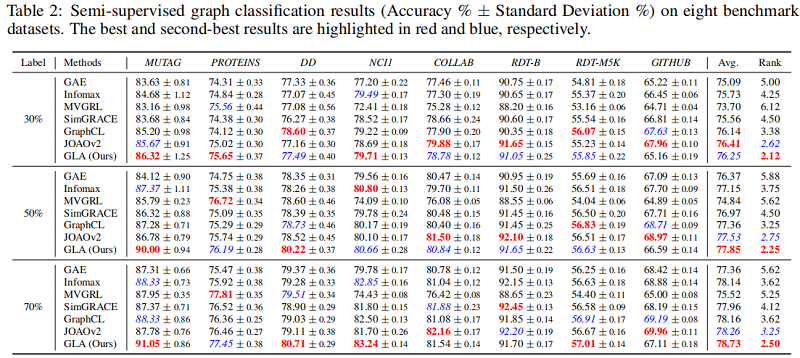
3.2 Semi-supervised graph classification results
3.3 Algorithmic Performance
3.4 In-depth Exploration
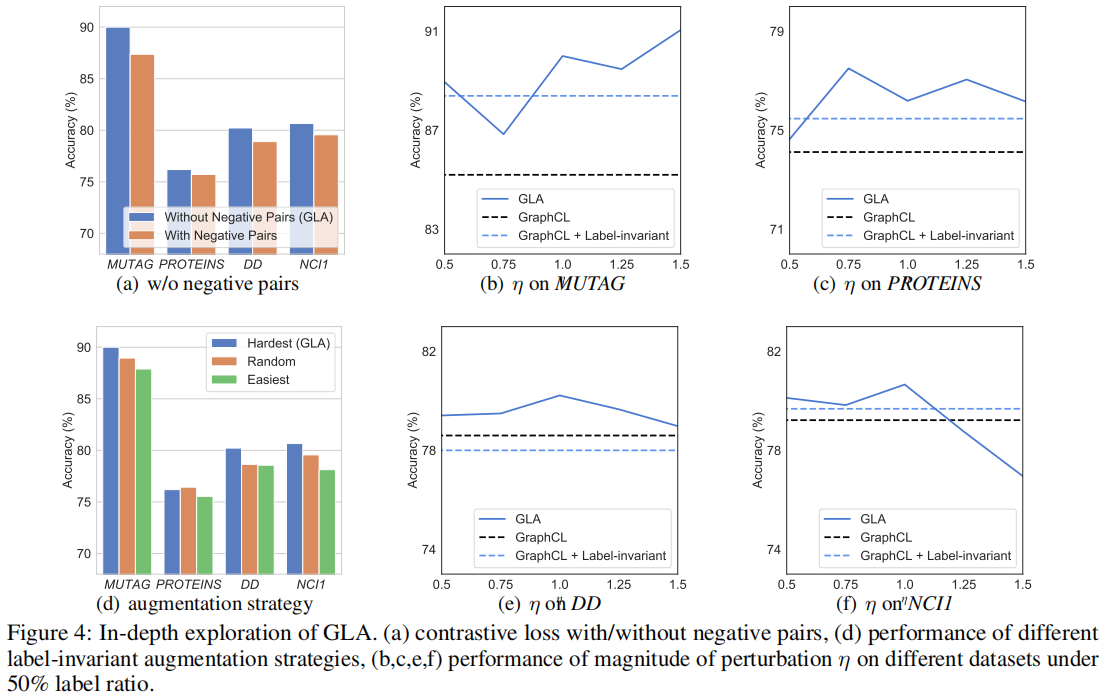
现有的图对比学习方法将来自不同源样本的增广图视为负对,并对这些负对采用实例级判别。由于这些方法分离了 pre-train 阶段和 fine-tuning 阶段,因此负对包含了来自不同源样本的增强样本,但在下游任务中具有相同的类别。
Figure 4(a) 显示了我们在四个数据集上有负对和没有负对的 GLA 的性能。可以看到,与没有负对的默认设置相比,有负对的性能显著下降,而负对在所有四个数据集上都表现一致。与现有的图对比方法不同,GLA 集成了预训练阶段和微调阶段,其中以自监督的方式设计的负对不利于下游任务。这一发现也与最近的[10,9]在视觉对比学习领域的研究结果相一致。
4 Conclusion
本文研究了图的对比学习问题。从现有的方法和训练前的方法不同,我们提出了一种新的图标签不变增强(GLA)算法,该算法集成了训练前和微调阶段,通过扰动在表示空间中进行标签不变增强。具体来说,GLA首先检查增广表示是否服从标签不变属性,并从合格的样本中选择最困难的样本。通过这种方法,GLA在不生成任何原始图的情况下实现了对比增强,也增加了模型的泛化。在8个基准图数据集上的半监督设置下的广泛实验证明了我们的GLA的有效性。此外,我们还提供了额外的实验来验证我们的动机,并深入探讨了GLA在负对、增强空间和策略效应中的影响因素。
论文解读(GLA)《Label-invariant Augmentation for Semi-Supervised Graph Classification》的更多相关文章
- 论文解读(GraphDA)《Data Augmentation for Deep Graph Learning: A Survey》
论文信息 论文标题:Data Augmentation for Deep Graph Learning: A Survey论文作者:Kaize Ding, Zhe Xu, Hanghang Tong, ...
- 论文解读(GIN)《How Powerful are Graph Neural Networks》
Paper Information Title:<How Powerful are Graph Neural Networks?>Authors:Keyulu Xu, Weihua Hu, ...
- 论文解读(GraphMAE)《GraphMAE: Self-Supervised Masked Graph Autoencoders》
论文信息 论文标题:GraphMAE: Self-Supervised Masked Graph Autoencoders论文作者:Zhenyu Hou, Xiao Liu, Yukuo Cen, Y ...
- 论文解读(SEP)《Structural Entropy Guided Graph Hierarchical Pooling》
论文信息 论文标题:Structural Entropy Guided Graph Hierarchical Pooling论文作者:Junran Wu, Xueyuan Chen, Ke Xu, S ...
- 论文解读(SUBLIME)《Towards Unsupervised Deep Graph Structure Learning》
论文信息 论文标题:Towards Unsupervised Deep Graph Structure Learning论文作者:Yixin Liu, Yu Zheng, Daokun Zhang, ...
- 论文解读(GSAT)《Interpretable and Generalizable Graph Learning via Stochastic Attention Mechanism》
论文信息 论文标题:Interpretable and Generalizable Graph Learning via Stochastic Attention Mechanism论文作者:Siqi ...
- 论文解读(GMT)《Accurate Learning of Graph Representations with Graph Multiset Pooling》
论文信息 论文标题:Accurate Learning of Graph Representations with Graph Multiset Pooling论文作者:Jinheon Baek, M ...
- 论文解读(ClusterSCL)《ClusterSCL: Cluster-Aware Supervised Contrastive Learning on Graphs》
论文信息 论文标题:ClusterSCL: Cluster-Aware Supervised Contrastive Learning on Graphs论文作者:Yanling Wang, Jing ...
- 论文解读(PPNP)《Predict then Propagate: Graph Neural Networks meet Personalized PageRank》
论文信息 论文标题:Predict then Propagate: Graph Neural Networks meet Personalized PageRank论文作者:Johannes Gast ...
- 论文解读(DropEdge)《DropEdge: Towards Deep Graph Convolutional Networks on Node Classification》
论文信息 论文标题:DropEdge: Towards Deep Graph Convolutional Networks on Node Classification论文作者:Yu Rong, We ...
随机推荐
- 点击>>>解锁Apache Hadoop Meetup 2021!
" 10月16日,属于开源发烧友的狂欢日来啦! Apache Hadoop Meetup 2021 开源大数据行业交流盛会盛大开启!让我们相约北京,一起嗨翻初秋~ 在当今信息化时代,逐渐成熟 ...
- Canvas 非线性图形(一):文本
基础 画布除了绘制图形以外还可以绘制文本,画布中的文本可以设置字体大小.字体格式.对齐方式(横向和纵向对齐方式),并且还可以制作很炫酷的文本,比如渐变文字. 文本有以下三个属性,控制文本的字体大小.字 ...
- [ARC119E] Pancakes (二维偏序,分类讨论)
题面 一个长为 N N N 的序列 S S S ,最多翻转序列中一个区间,最小化 ∑ i = 2 N ∣ S i − S i − 1 ∣ \sum_{i=2}^{N}|S_i-S_{i-1}| i=2 ...
- ansible 003 常用模块
常用模块 file 模块 管理被控端文件 回显为绿色则,未变更,符合要求 黄色则改变 红色则报错 因为默认值为file,那么文件不存在,报错 改为touch则创建 将state改为directory变 ...
- 函数索引引用的函数必须是immutable类型
用户在使用中,可能会用到基于函数的索引,但是函数是非 immutable 类型的,导致函数索引无法创建.如: test=# create index ind_t1 on t1(to_char(crea ...
- 注解@DependsOn解析
作用 @DependsOn注解可以定义在类和方法上,意思是我这个组件要依赖于另一个组件,也就是说被依赖的组件会比该组件先注册到IOC容器中. 在哪里被解析 解析的地方在 ComponentScanAn ...
- Python数据科学手册-机器学习: 流形学习
PCA对非线性的数据集处理效果不太好. 另一种方法 流形学习 manifold learning 是一种无监督评估器,试图将一个低维度流形嵌入到一个高纬度 空间来描述数据集 . 类似 一张纸 (二维) ...
- thinkphp5.1中适配百度富文本编辑器ueditor
百度富文本编辑器ueditor虽然很老,但是功能齐全,我近期需要能批量粘贴图片的功能,但是找不到,很无奈.然后现在就分享一下如何把ueditor适配到thinkphp5.1,有知道如何批量上传图片的艾 ...
- kindeditor获取html内容之终极大法
请允许我哔哔两句,真是难受啊,有问题去百度,结果百了一堆乱七八糟的内容,有头没尾,有尾没头的,搞得我晕头转向,现在把kindeditor获取HTML的终极打法无偿分享出来,这可是我配置查找了一下午的成 ...
- ELK基于ElastAlert实现日志的微信报警
文章转载自:https://mp.weixin.qq.com/s/W9b28CFBEmxBPz5bGd1-hw 教程pdf文件下载地址 https://files.cnblogs.com/files/ ...