orocos_kdl学习(二):KDL Tree与机器人运动学
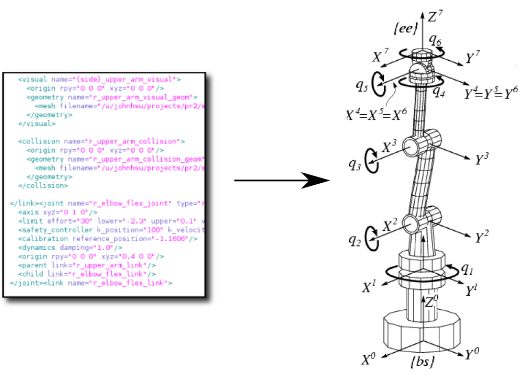
KDL(Kinematics and Dynamics Library)中定义了一个树来代表机器人的运动学和动力学参数,ROS中的kdl_parser提供了工具能将机器人描述文件URDF转换为KDL tree.
Kinematic Trees: 链或树形结构。已经有多种方式来定义机构的运动学结构,KDL使用图论中的术语来定义:
- A closed-loop mechanism is a graph, 闭链机构是一幅图
- an open-loop mechanism is a tree, 开链机构是一棵树
- an unbranched tree is a chain. 没有分支的树是一个运动链
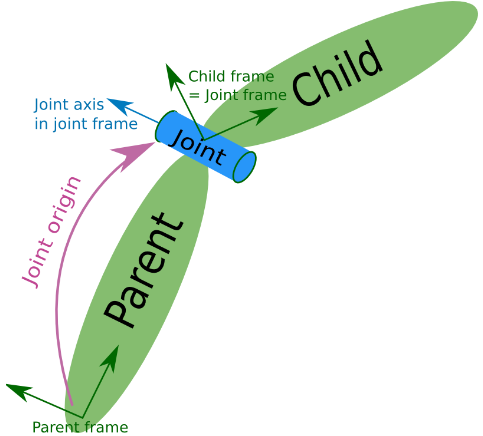
KDL Chain和KDL Tree都由最基本的KDL Segments元素串接而成,Segment可以理解为机构运动链上的一个运动部件。如下图所示KDL Segment包含关节KDL Joint 以及部件的质量/惯性属性KDL RigidBodyInertia,并且定义了一个参考坐标系Freference和末端坐标系Ftip
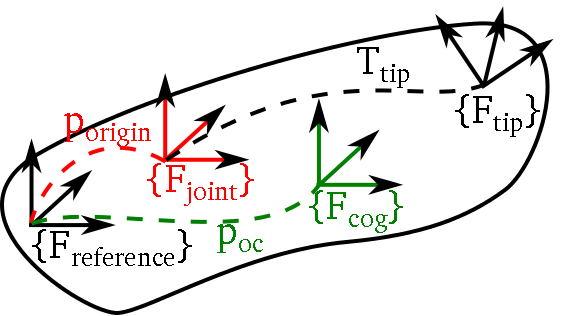
KDL segment
末端到关节坐标系的转换由Ttip描述。在一个运动链或树中,子部件会被添加到父部件的末端,因此上一个部件的Ftip就是下一个部件的参考坐标系Freference (tip frame of parent = reference frame of the child). 通常Fjoint和Freference是重合的,但是也可以存在偏移。
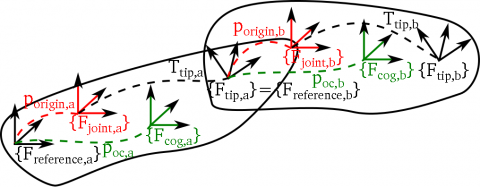
KDL chain
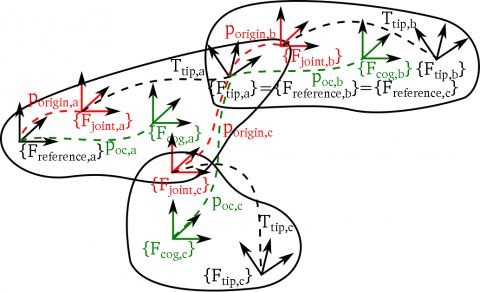
KDL tree
KDL中的定义与URDF中的定义基本是一样的:
也可以参考MATLAB Robotics System Toolbox中的对Rigid Body Tree Robot Model的描述:

Python中创建KDL tree
参考pykdl_utils,pykdl_utils中包含了kdl_parser.py(用于解析URDF文件并将其转换为KDL tree或chain),kdl_kinematics.py(封装了KDL kinematics的一系列函数,使得用Python调用更方便)等实用程序。下面先安装urdfdom_py(Python implementation of the URDF parser):
sudo apt-get install ros-indigo-urdfdom-py
然后在github上下载pykdl_utils的源代码,使用catkin_make进行编译。
convert URDF objects into PyKDL.Tree
首先通过urdf_parser_py来解析URDF文件,有下面几种使用方式:通过xml字符串解析、xml文件解析,以及从ROS 参数服务器获取robot_description字符串信息。
#! /usr/bin/env python # Load the urdf_parser_py manifest, you use your own package
# name on the condition but in this case, you need to depend on
# urdf_parser_py.
import roslib; roslib.load_manifest('urdfdom_py')
import rospy # Import the module from urdf_parser_py.urdf import URDF # 1. Parse a string containing the robot description in URDF.
# Pro: no need to have a roscore running.
# Cons: n/a
# Note: it is rare to receive the robot model as a string.
robot = URDF.from_xml_string("<robot name='myrobot'></robot>") # - OR - # 2. Load the module from a file.
# Pro: no need to have a roscore running.
# Cons: using hardcoded file location is not portable.
robot = URDF.from_xml_file() # - OR - # 3. Load the module from the parameter server.
# Pro: automatic, no arguments are needed, consistent
# with other ROS nodes.
# Cons: need roscore to be running and the parameter to
# to be set beforehand (through a roslaunch file for
# instance).
robot = URDF.from_parameter_server() # Print the robot
print(robot)
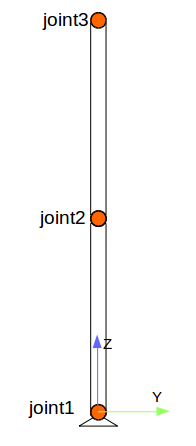
下面编写一个简单的robot.urdf文件,创建一个连杆机器人。joint1为与基座link0相连的基关节,joint3为末端关节。
<robot name="test_robot">
<link name="link0" />
<link name="link1" />
<link name="link2" />
<link name="link3" /> <joint name="joint1" type="continuous">
<parent link="link0"/>
<child link="link1"/>
<origin xyz="0 0 0" rpy="0 0 0" />
<axis xyz="1 0 0" />
</joint> <joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="0 0 1" rpy="0 0 0" />
<axis xyz="1 0 0" />
</joint> <joint name="joint3" type="continuous">
<parent link="link2"/>
<child link="link3"/>
<origin xyz="0 0 1" rpy="0 0 0" />
<axis xyz="1 0 0" />
</joint> </robot>
pykdl_utils中还提供了下列几个指令用于测试分析我们的机器人,如果ROS参数服务器中加载了/robot_description则命令行中的xml文件可以省略:
rosrun pykdl_utils kdl_parser.py [robot.xml]
rosrun pykdl_utils kdl_kinematics.py [robot.xml]
rosrun pykdl_utils joint_kinematics.py [robot.xml]
对于我们上面编写的robot.urdf文件,可以用下面命令进行测试:
rosrun pykdl_utils kdl_parser.py `rospack find test`/robot.urdf
下面是KDL运动学一些基本的用法,相关函数可以参考:KDLKinematics Class Reference
#! /usr/bin/env python # Import the module
from urdf_parser_py.urdf import URDF
from pykdl_utils.kdl_parser import kdl_tree_from_urdf_model
from pykdl_utils.kdl_kinematics import KDLKinematics robot = URDF.from_xml_file("/home/sc/catkin_ws/src/test/robot.urdf") tree = kdl_tree_from_urdf_model(robot)
print tree.getNrOfSegments() chain = tree.getChain("link0", "link3")
print chain.getNrOfJoints() # forwawrd kinematics
kdl_kin = KDLKinematics(robot, "link0", "link3")
q = [0, 0, 0]
pose = kdl_kin.forward(q) # forward kinematics (returns homogeneous 4x4 matrix)
print pose q_ik = kdl_kin.inverse(pose) # inverse kinematics
print q_ik if q_ik is not None:
pose_sol = kdl_kin.forward(q_ik) # should equal pose
print pose_sol J = kdl_kin.jacobian(q)
print 'J:', J
我们将URDF文件转换为KDL tree以后可以获取机构运动链/树的相关信息。KDLKinematics的构造函数根据urdf文件,以及机器人的基座base_link和末端end_link就可以创建出运动链:
def pykdl_utils.kdl_kinematics.KDLKinematics.__init__ (self, urdf, base_link, end_link, kdl_tree = None) # Parameters:
# urdf URDF object of robot.
# base_link Name of the root link of the kinematic chain.
# end_link Name of the end link of the kinematic chain.
# kdl_tree Optional KDL.Tree object to use. If None, one will be generated from the URDF.
正运动学的计算函数forward参数就是关节角度;逆运动学计算函数inverse的参数为末端位姿矩阵,因为是数值解,还可以指定初始值,以及关节角的范围。
# Inverse kinematics for a given pose, returning the joint angles required to obtain the target pose.
def pykdl_utils.kdl_kinematics.KDLKinematics.inverse(self, pose, q_guess = None, min_joints = None, max_joints = None )
# Parameters:
# pose Pose-like object represeting the target pose of the end effector.
# q_guess List of joint angles to seed the IK search.
# min_joints List of joint angles to lower bound the angles on the IK search. If None, the safety limits are used.
# max_joints List of joint angles to upper bound the angles on the IK search. If None, the safety limits are used.
C++中创建KDL tree
为了使用KDL parser需要在package.xml中添加相关依赖项:
<package>
...
<build_depend package="kdl_parser" />
...
<run_depend package="kdl_parser" />
...
</package>
另外还需要在C++程序中加入相关的头文件:
#include <kdl_parser/kdl_parser.hpp>
下面有多种从urdf创建KDL tree的方式:
1. From a file
KDL::Tree my_tree;
if (!kdl_parser::treeFromFile("filename", my_tree)){
ROS_ERROR("Failed to construct kdl tree");
return false;
}
2. From the parameter server
KDL::Tree my_tree;
ros::NodeHandle node;
std::string robot_desc_string;
node.param("robot_description", robot_desc_string, std::string());
if (!kdl_parser::treeFromString(robot_desc_string, my_tree)){
ROS_ERROR("Failed to construct kdl tree");
return false;
}
3. From an xml element
KDL::Tree my_tree;
TiXmlDocument xml_doc;
xml_doc.Parse(xml_string.c_str());
xml_root = xml_doc.FirstChildElement("robot");
if (!xml_root){
ROS_ERROR("Failed to get robot from xml document");
return false;
}
if (!kdl_parser::treeFromXml(xml_root, my_tree)){
ROS_ERROR("Failed to construct kdl tree");
return false;
}
4. From a URDF model
KDL::Tree my_tree;
urdf::Model my_model;
if (!my_model.initXml(....)){
ROS_ERROR("Failed to parse urdf robot model");
return false;
}
if (!kdl_parser::treeFromUrdfModel(my_model, my_tree)){
ROS_ERROR("Failed to construct kdl tree");
return false;
}
参考:
Robotics System Toolbox—Rigid Body Tree Robot Model
orocos_kdl学习(二):KDL Tree与机器人运动学的更多相关文章
- TRAC-IK机器人运动学求解器
TRAC-IK和Orocos KDL类似,也是一种基于数值解的机器人运动学求解器,但是在算法层面上进行了很多改进(Specifically, KDL’s convergence algorithms ...
- emberjs学习二(ember-data和localstorage_adapter)
emberjs学习二(ember-data和localstorage_adapter) 准备工作 首先我们加入ember-data和ember-localstorage-adapter两个依赖项,使用 ...
- 集成学习二: Boosting
目录 集成学习二: Boosting 引言 Adaboost Adaboost 算法 前向分步算法 前向分步算法 Boosting Tree 回归树 提升回归树 Gradient Boosting 参 ...
- Android JNI学习(二)——实战JNI之“hello world”
本系列文章如下: Android JNI(一)——NDK与JNI基础 Android JNI学习(二)——实战JNI之“hello world” Android JNI学习(三)——Java与Nati ...
- ReactJS入门学习二
ReactJS入门学习二 阅读目录 React的背景和基本原理 理解React.render() 什么是JSX? 为什么要使用JSX? JSX的语法 如何在JSX中如何使用事件 如何在JSX中如何使用 ...
- TweenMax动画库学习(二)
目录 TweenMax动画库学习(一) TweenMax动画库学习(二) TweenMax动画库学习(三) Tw ...
- Hbase深入学习(二) 安装hbase
Hbase深入学习(二) 安装hbase This guidedescribes setup of a standalone hbase instance that uses the local fi ...
- Struts2框架学习(二) Action
Struts2框架学习(二) Action Struts2框架中的Action类是一个单独的javabean对象.不像Struts1中还要去继承HttpServlet,耦合度减小了. 1,流程 拦截器 ...
- Python学习二:词典基础详解
作者:NiceCui 本文谢绝转载,如需转载需征得作者本人同意,谢谢. 本文链接:http://www.cnblogs.com/NiceCui/p/7862377.html 邮箱:moyi@moyib ...
随机推荐
- canvas抛物线运动轨迹
本来是想做一个贝塞尔曲线运动轨迹的 公式太复杂了,懒得算,公式在最后 我先画了一个抛物线,我确定了两个点,起点(0,0),终点(200,200) 用坐标系可算出方程 y=-0.005x^2 现在找出终 ...
- python多进程和多线程
多任务才有多进程和线程: 线程是最小的执行单元,而进程由至少一个线程组成.如何调度进程和线程,完全由操作系统决定,程序自己不能决定什么时候执行,执行多长时间. 多进程和多线程的程序涉及到同步.数据共享 ...
- linux安装目录
Linux 的软件安装目录是也是有讲究的,理解这一点,在对系统管理是有益的 /usr:系统级的目录,可以理解为C:/Windows/,/usr/lib理解为C:/Windows/System32./u ...
- asp.net core web项目目录解读
Connected Services 和传统.net web项目相比,它的功能类似于添加webservice或者wcf service的引用.暂时用不到,有兴趣的小伙伴可以深入了解.右键这个目录可以看 ...
- URAL - 1078 Segments
URAL - 1078 题目大意:有n条线段,一个线段a 完全覆盖另一个线段b 当且仅当,a.l < b.l && a.r>b.r.问你 一个线段覆盖一个线段再覆盖一个线段 ...
- Python进行URL解码
import urllib rawurl=xxx url=urllib.unquote(rawurl) 所用模块:urllib 所用函数:urllib.unquote() 案例 import urll ...
- ZooKeeper典型应用场景:分布式锁
分布式锁是控制分布式系统之间同步访问共享资源的一种方式.如果不同的系统或是同一个系统的不同主机之间共享了一个或一组资源,那么访问这些资源的时候,往往需要通过一些互斥手段来防止彼此之间的干扰,以保证一致 ...
- 细说java中的类
前言 最近在学习<java编程思想> 学到了内部类 类不就是class吗 天天用 还能讲出花来了不成... 其实不然,在java中,类的种类和使用方式多种多样,花样繁多.其中主要有 普通类 ...
- 【Ray Tracing The Next Week 超详解】 光线追踪2-6 Cornell box
Chapter 6:Rectangles and Lights 今天,我们来学习长方形区域光照 先看效果 light 首先我们需要设计一个发光的材质 /// light.hpp // ------- ...
- [漏洞分析]thinkphp 5.x全版本任意代码执行分析全记录
0x00 简介 2018年12月10日中午,thinkphp官方公众号发布了一个更新通知,包含了一个5.x系列所有版本存在被getshell的高风险漏洞. 吃完饭回来看到这个公告都傻眼了,整个tp5系 ...