关于torch.nn.Conv2d的笔记
先看一下CLASS有哪些参数:
torch.nn.Conv2d(
in_channels,
out_channels,
kernel_size,
stride=1,
padding=0,
dilation=1,
groups=1,
bias=True,
padding_mode='zeros'
)
可以对输入的张量进行 2D 卷积。
in_channels: 输入图片的 channel 数。
out_channels: 输出图片的 channel 数。
kernel_size: 卷积核的大小。
stride: 滑动的步长。
bias: 若设为 True,则对输出图像每个元素加上一个可以学习的 bias。
dilation: 核间点距。
padding: 控制补 $0$ 的数目。padding 是在卷积之前补 $0$,如果愿意的话,可以通过使用 torch.nn.Functional.pad 来补非 $0$ 的内容。padding 补 $0$ 的策略是四周都补,如果 padding 输入是一个二元组的话,则第一个参数表示高度上面的 padding,第2个参数表示宽度上面的 padding。
关于 padding 策略的例子:
x = torch.tensor([[[[-1.0, 2.0], [3.5, -4.0]]]])
print(x, x.shape) # N = 1, C = 1, (H,W) = (2,2)
layer1 = torch.nn.Conv2d(1, 1, kernel_size=(1, 1), padding=0)
layer2 = torch.nn.Conv2d(1, 1, kernel_size=(1, 1), padding=(1, 2))
y = layer1(x)
print(y, y.shape)
z = layer2(x)
print(z, z.shape)
结果:
tensor([[[[-1.0000, 2.0000],
[ 3.5000, -4.0000]]]]) torch.Size([1, 1, 2, 2])
tensor([[[[-0.3515, 0.4479],
[ 0.8476, -1.1510]]]], grad_fn=<ThnnConv2DBackward>) torch.Size([1, 1, 2, 2])
tensor([[[[-0.6553, -0.6553, -0.6553, -0.6553, -0.6553, -0.6553],
[-0.6553, -0.6553, 0.2367, -2.4393, -0.6553, -0.6553],
[-0.6553, -0.6553, -3.7772, 2.9127, -0.6553, -0.6553],
[-0.6553, -0.6553, -0.6553, -0.6553, -0.6553, -0.6553]]]],
grad_fn=<ThnnConv2DBackward>) torch.Size([1, 1, 4, 6])
可以看到 padding 为 $(1,2)$ 时,在高度上两边各增加了 $1$ 行,总共增加 $2$ 行。在宽度上两边各增加 $2$ 列,总共增加 $4$ 列。至于为什么增加的行列不是 $0$,这是因为有参数 bias 存在的缘故,此时 bias 值为 $-0.6553$(这个 bias 值初始值应该是一个随机数)。
关于 dilation:
默认情况下 dilation 为 $(1,1)$,就是正常的紧密排布的卷积核。
下图是 dilation 为 $(2,2)$ 的情况(没有 padding,stride 为 $(1,1)$),蓝色的是输入图像,绿色的是输出图像。
输入图像的 shape 是 $(N, C_{in}, H_{in}, W_{in})$,$N$ 是 batch size,$C_{in}$ 表示 channel 数,$H,W$ 分别表示高和宽。
输出图像的 shape $(N, C_{out}, H_{out}, W_{out})$ 可以通过计算得到:

这个式子很好理解,由于宽高的计算类似,所以只以高为例子来讲:
$H_{in} + 2 \times \rm{padding}[0]$ 即输入图像补完 $0$ 之后的高度,一个卷积核在图像上所能覆盖的高度为 $(\rm{kernel\_size}[0] - 1) \times \rm{dilation}[0] + 1$(例如上面动图就是 $(3 - 1) \times 2 + 1 = 5$),这两个值相减即为,步长为 $1$ 时,卷积核在图像高度上能滑动的次数。而这个次数除去实际步长 $stride[0]$ 再向下取整,即卷积核在图像高度上实际能滑动的次数。这个实际滑动次数加上 $1$ 即输出图像的高度。
需要注意的是:kernel_size, stride, padding, dilation 不但可以是一个单个的 int ——表示在高度和宽度使用同一个 int 作为参数,也可以使用一个 (int1, int2) 的二元组(其实本质上单个的 int 也可以看作一个二元组 (int, int))。在元组中,第1个参数对应高度维度,第2个参数对应宽度维度。
另外,对于卷积核,它其实并不是二维的,它具有长宽深三个维度;实际上它的 channel 数等于输入图像的 channel 数 $C_{in}$,而卷积核的个数即输出图像的 channel 数 $C_{out}$。
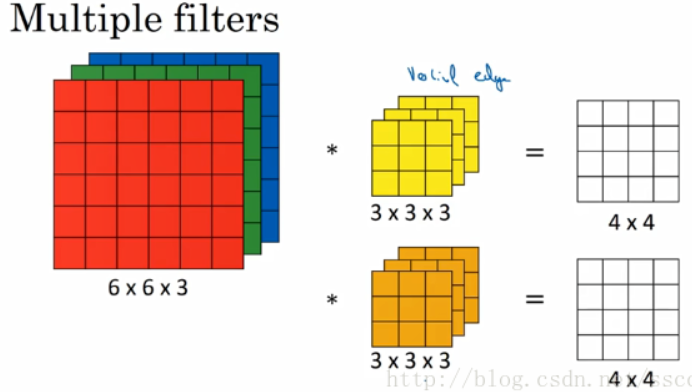
以上图为例,输入图像的 shape 是 $(C = 3, H = 6, W = 6)$,这里略去 batch size,第一个卷积核是 $(C = 3, H = 3, W = 3)$,他在输入图像上滑动并卷积后得到一张 $(C = 1, H = 4, W = 4)$ 的特征图(feature map),第二个卷积核类似得到第二张 $(C = 1, H = 4, W = 4)$ 特征图,那么输出图像就是把这两张特征图叠在一块儿,shape 即为 $(C = 2, H = 4, W = 4)$。
这里顺带记录一下 Batch norm 2D 是怎么做的:
如果把一个 shape 为 $(N, C, H, W)$ 类比为一摞书,这摞书总共有 N 本,每本均有 C 页,每页有 H 行,每行 W 个字符。BN 求均值时,相当于把这 $N$ 本书都选同一个页码加起来(例如第1本书的第36页,第2本书的第36页......),再除以每本书的该页上的字符的总数 $N \times H \times W$,因此可以把 BN 看成求“平均书”的操作(注意这个“平均书”每页只有一个字),求标准差时也是同理。
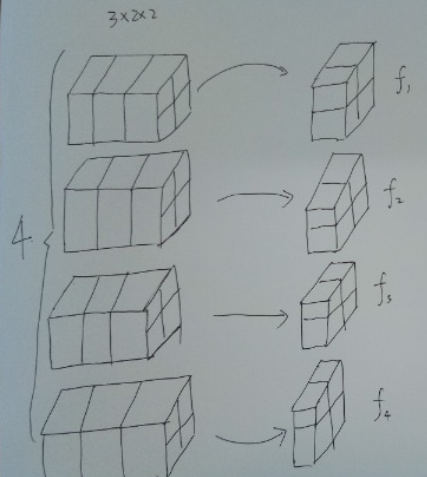
例如下图,输入的张量 shape 为 $(4, 3, 2, 2)$,对于所有 batch 中的同一个 channel 的元素进行求均值与方差,比如对于所有的 batch,都拿出来最后一个channel,一共有 $f_1 + f_2 + f_3 + f_4 = 4 + 4 + 4 + 4 = 16$ 个元素,然后去求这 $16$ 个元素的均值与方差。
求取完了均值与方差之后,对于这 $16$ 个元素中的每个元素分别进行归一化,然后乘以 $\gamma$ 加上 $\beta$,公式如下
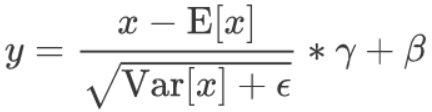
batch norm层能够学习到的参数,对于一个特定的 channel 而言实际上是两个参数 $\gamma, beta$,而对于所有的channel而言实际上就是 channel 数的两倍。
关于其他的 Normalization 做法的形象理解可以参考https://zhuanlan.zhihu.com/p/69659844
关于torch.nn.Conv2d的笔记的更多相关文章
- torch.nn.Conv2d()使用
API 输入:[ batch_size, channels, height_1, width_1 ] Conv2d输入参数:[ channels, output, height_2, width_2 ...
- 关于torch.nn.Linear的笔记
关于该类: torch.nn.Linear(in_features, out_features, bias=True) 可以对输入数据进行线性变换: $y = x A^T + b$ in_featu ...
- [pytorch笔记] torch.nn vs torch.nn.functional; model.eval() vs torch.no_grad(); nn.Sequential() vs nn.moduleList
1. torch.nn与torch.nn.functional之间的区别和联系 https://blog.csdn.net/GZHermit/article/details/78730856 nn和n ...
- PyTorch官方中文文档:torch.nn
torch.nn Parameters class torch.nn.Parameter() 艾伯特(http://www.aibbt.com/)国内第一家人工智能门户,微信公众号:aibbtcom ...
- pytorch中文文档-torch.nn常用函数-待添加-明天继续
https://pytorch.org/docs/stable/nn.html 1)卷积层 class torch.nn.Conv2d(in_channels, out_channels, kerne ...
- PyTorch : torch.nn.xxx 和 torch.nn.functional.xxx
PyTorch : torch.nn.xxx 和 torch.nn.functional.xxx 在写 PyTorch 代码时,我们会发现一些功能重复的操作,比如卷积.激活.池化等操作.这些操作分别可 ...
- nn.Conv2d 参数及输入输出详解
Torch.nn.Conv2d(in_channels,out_channels,kernel_size,stride=1,padding=0,dilation=1,groups=1,bias=Tru ...
- Pytorch中nn.Conv2d的用法
Pytorch中nn.Conv2d的用法 nn.Conv2d是二维卷积方法,相对应的还有一维卷积方法nn.Conv1d,常用于文本数据的处理,而nn.Conv2d一般用于二维图像. 先看一下接口定义: ...
- Pytorch本人疑问(1) torch.nn和torch.nn.functional之间的区别
在写代码时发现我们在定义Model时,有两种定义方法: torch.nn.Conv2d()和torch.nn.functional.conv2d() 那么这两种方法到底有什么区别呢,我们通过下述代码看 ...
随机推荐
- python默认参数问题
我们在定义默认参数时,有时会遇到一写似乎难以理解的问题.比如,在第二次调用函数时,默认参数记住了上一次执行的结果: >>> def test(L=[3,]): ... L.appen ...
- Mybatis注解开发单表CRUD
Mybatis注解开发单表CRUD mybatis注解开发和xml开发不可兼容,要么全部使用注解,要么全部使用xml,个人建议注解,简单. 当实体类属性名称和数据库表属性名称一致时:无需配置Resul ...
- s2010编译C++ 链栈的使用
// CTest.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" #include <iostream> #include &l ...
- 洛谷P2296 寻找道路
\(\Large\textbf{Description:} \large {在有向图 G 中,每条边的长度均为 1,现给定起点和终点,请你在图中找一条从起点到终点的路径,该路径满足以下条件:}\) \ ...
- iOS大V博客
王巍的博客:王巍目前在日本横滨任职于LINE.工作内容主要进行Unity3D开发,8小时之外经常进行iOS/Mac开发.他的陈列柜中已有多款应用,其中番茄工作法工具非常棒. http://onevca ...
- STM32F103 USB虚拟串口 驱动例程移植
1)驱动下载及安装.目前ST公司支持WIN7版本号为:VCP_V1.3.1_Setup.exe (在官网上搜索stsw-stm32102即是了):先安装驱动后再插入USB不然安装不成功. 2)固件下载 ...
- 016.CI4框架CodeIgniter数据库操作之:Insert插入一条数据
01.在Model中,写入插入的语句 <?php namespace App\Models\System; use CodeIgniter\Model; class User_model ext ...
- 007.CI4框架CodeIgniter, 加载自己的helper辅助类,调用自己helper中定义各种全局函数
01. 我们在Helpers文件中创建一个Tx_helper.php的文件,里面就下一个函数 <?php //输出 function ShowMessage($AMsg) { echo &quo ...
- mysql limit查询入门
- 吴裕雄--天生自然java开发常用类库学习笔记:大数操作
import java.math.* ; class MyMath{ public static double add(double d1,double d2){ // 进行加法计算 BigDecim ...