如何在ROS中使用PCL(2)
记录关于我们运行roslaunch openni_launch openni.launch 命令时生成的话题以及这些话题的数据类型便于后期的处理,只有知道它们的数据结构,才能很好的对数据进行处理,我们观察到使用rostopic list的所有话题的列表,当然其中也有一些不经常使用的话题类型,比如下面这些话题是我们经常使用的
/camera/depth/image
/camera/depth/image_raw
/camera/depth/points
/camera/ir/image_raw
/camera/rgb/image_color
/camera/rgb/image_raw
发布的话题:
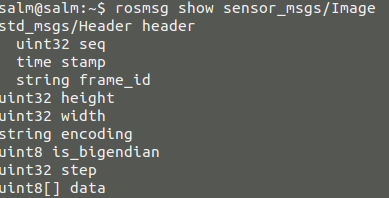
image_raw (sensor_msgs/Image) : 未处理的原始图像
使用命令查看sensor_msgs/Image的数据
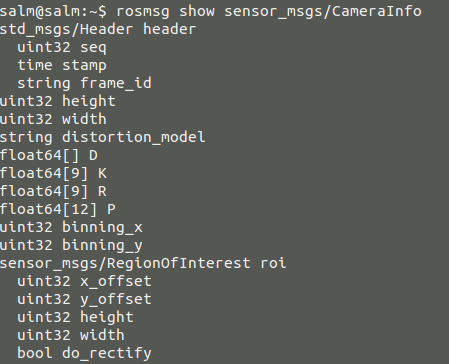
camera_info (sensor_msgs/CameraInfo):包含了相机标定配置以及相关数据
介绍几个ROS节点运行的几种工具。他们的作用是ROS格式点云或包与点云数据(PCD)文件格式之间的相互转换。
(1)bag_to_pcd
用法:rosrun pcl_ros bag_to_pcd <input_file.bag> <topic> <output_directory>
读取一个包文件,保存所有ROS点云消息在指定的PCD文件中。
(2)convert_pcd_to_image
用法:rosrun pcl_ros convert_pcd_to_image <cloud.pcd>
加载一个PCD文件,将其作为ROS图像消息每秒中发布五次。
(3) convert_pointcloud_to_image
用法:rosrun pcl_ros convert_pointcloud_to_image input:=/my_cloud output:=/my_image
查看图像:rosrun image_view image_view image:=/my_image
订阅一个ROS的点云的话题并以图像的信息发布出去。
(4)pcd_to_pointcloud
用法:rosrun pcl_ros pcd_to_pointcloud <file.pcd> [ <interval> ]
<file.pcd> is the (required) file name to read.
<interval> is the (optional) number of seconds to sleep between messages. If <interval> is zero or not specified the message is published once.
加载一个PCD文件,发布一次或多次作为ROS点云消息
(5)pointcloud_to_pcd
例如: rosrun pcl_ros pointcloud_to_pcd input:=/velodyne/pointcloud2
订阅一个ROS的话题和保存为点云PCD文件。每个消息被保存到一个单独的文件,名称是由一个可自定义的前缀参数,ROS时间的消息,和以PCD扩展的文件。
那么我们使用一个简单的例子来实现在ROS中进行平面的分割,同时注意到使用的数据转换的使用
/**************************************************************************
关于使用pcl/PointCloud<T>的举例应用。这一类型的数据格式是PCL库中定义的一种数据格式
这里面使用了两次数据转换从 sensor_msgs/PointCloud2 到 pcl/PointCloud<T> 和
从 pcl::ModelCoefficients 到 pcl_msgs::ModelCoefficients.
************************************************************************/
#include <iostream>
//ROS
#include <ros/ros.h>
// PCL specific includes
#include <sensor_msgs/PointCloud2.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/ros/conversions.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h> #include <pcl/io/pcd_io.h> //关于平面分割的头文件
#include <pcl/sample_consensus/model_types.h> //分割模型的头文件
#include <pcl/sample_consensus/method_types.h> //采样一致性的方法
#include <pcl/segmentation/sac_segmentation.h> //ransac分割法 ros::Publisher pub; void
cloud_cb (const sensor_msgs::PointCloud2ConstPtr& input)
{
// 将点云格式为sensor_msgs/PointCloud2 格式转为 pcl/PointCloud
pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::fromROSMsg (*input, cloud); //关键的一句数据的转换 pcl::ModelCoefficients coefficients; //申明模型的参数
pcl::PointIndices inliers; //申明存储模型的内点的索引
// 创建一个分割方法
pcl::SACSegmentation<pcl::PointXYZ> seg;
// 这一句可以选择最优化参数的因子
seg.setOptimizeCoefficients (true);
// 以下都是强制性的需要设置的
seg.setModelType (pcl::SACMODEL_PLANE); //平面模型
seg.setMethodType (pcl::SAC_RANSAC); //分割平面模型所使用的分割方法
seg.setDistanceThreshold (0.01); //设置最小的阀值距离 seg.setInputCloud (cloud.makeShared ()); //设置输入的点云
seg.segment (inliers, coefficients); //cloud.makeShared() 创建一个 boost shared_ptr // pcl_msgs::fromROSMsg(const sensor_msgs::PointCloud2 &, pcl::PointCloud<T>&);
//pcl::io::savePCDFileASCII("test_pcd.pcd",cloud); // 把提取出来的内点形成的平面模型的参数发布出去
pcl_msgs::ModelCoefficients ros_coefficients;
pcl_conversions::fromPCL(coefficients, ros_coefficients);
pub.publish (ros_coefficients);
} int
main (int argc, char** argv)
{
// Initialize ROS
ros::init (argc, argv, "my_pcl_tutorial");
ros::NodeHandle nh; // Create a ROS subscriber for the input point cloud
ros::Subscriber sub = nh.subscribe ("input", , cloud_cb); // Create a ROS publisher for the output model coefficients
pub = nh.advertise<pcl_msgs::ModelCoefficients> ("output", ); // Spin
ros::spin ();
}
在这里我们的input就是要订阅的话题/camera/depth/points
我们在rosrun 的时候注明input:=/camera/depth/points的这样就可以使用kienct发布的点云数据,同时你也可以指定点云的数据
如何在ROS中使用PCL(2)的更多相关文章
- 如何在ROS中使用PCL—数据格式(1)
在ROS中点云的数据类型 在ROS中表示点云的数据结构有: sensor_msgs::PointCloud sensor_msgs::PointCloud2 pcl::PointCl ...
- 我是如何在SQLServer中处理每天四亿三千万记录的
首先声明,我只是个程序员,不是专业的DBA,以下这篇文章是从一个问题的解决过程去写的,而不是一开始就给大家一个正确的结果,如果文中有不对的地方,请各位数据库大牛给予指正,以便我能够更好的处理此次业务. ...
- 如何在SpringBoot中使用JSP ?但强烈不推荐,果断改Themeleaf吧
做WEB项目,一定都用过JSP这个大牌.Spring MVC里面也可以很方便的将JSP与一个View关联起来,使用还是非常方便的.当你从一个传统的Spring MVC项目转入一个Spring Boot ...
- 如何在latex 中插入EPS格式图片
如何在latex 中插入EPS格式图片 第一步:生成.eps格式的图片 1.利用visio画图,另存为pdf格式的图片 利用Adobe Acrobat裁边,使图片大小合适 另存为.eps格式,如下图所 ...
- 如何正确的使用json?如何在.Net中使用json?
什么是json json是一种轻量级的数据交换格式,由N组键值对组成的字符串,完全独立于语言的文本格式. 为什么要使用json 在很久很久以前,调用第三方API时,我们通常是采用xml进行数据交互,但 ...
- [原创]如何在Parcelable中使用泛型
[原创]如何在Parcelable中使用泛型 实体类在实现Parcelable接口时,除了要实现它的几个方法之外,还另外要定义一个静态常量CREATOR,如下例所示: public static cl ...
- 如何在springMVC 中对REST服务使用mockmvc 做测试
如何在springMVC 中对REST服务使用mockmvc 做测试 博客分类: java 基础 springMVCmockMVC单元测试 spring 集成测试中对mock 的集成实在是太棒了!但 ...
- 如何在tomcat中如何部署java EE项目
如何在tomcat中如何部署java EE项目 1.直接把项目复制到Tomcat安装目录的webapps目录中,这是最简单的一种Tomcat项目部署的方法,也是初学者最常用的方法.2.在tomcat安 ...
- 【转】我是如何在SQLServer中处理每天四亿三千万记录的
原文转自:http://blog.jobbole.com/80395/ 首先声明,我只是个程序员,不是专业的DBA,以下这篇文章是从一个问题的解决过程去写的,而不是一开始就给大家一个正确的结果,如果文 ...
随机推荐
- zookeeper 的监控指标
一 应用场景描述 在目前公司的业务中,没有太多使用ZooKeeper作为协同服务的场景.但是我们将使用Codis作为Redis的集群部署方案,Codis依赖ZooKeeper来存储配置信息.所以做好Z ...
- SQL SERVER 的排序规则
有时候查询数据库的时候会发现(比如做重名检查的时候):数据库的查询时对大小写不敏感的,也就是 A 和 a 是一样的. 也就是说 select * from tabletest where name = ...
- Shader中ColorMask的使用
ColorMask可以对输出颜色进行Mask处理 使用方法和Cull这些标记差不多 SubShader { ColorMask R Cull Off .... 如果ColorMask填0就什么都不显示
- [100]tar命令打包(排除目录或文件)
在linux中可以用tar打包目录以方便传输or备份,我们先来看一个例子 Linux下tar命令exclude选项排除指定文件或目录 test 文件夹有如下文件 [root@lee ~]# ll te ...
- CNN及其可解释性
https://stats385.github.io/readings https://arxiv.org/pdf/1311.2901.pdf A Mathematical Theory of Dee ...
- EF事务处理封装公用
/// <summary> /// EF事务封装 公用类 /// </summary> public class TransactionCommon { DbContextTr ...
- 不忘初心,回归本质 .net core
static void Main(string[] args) { ; object j = i;//装箱 就是把值类型转换成引用类型 int k = (int)j;//拆箱 就是把引用类型转换成值类 ...
- iOS开发-通讯录有界面
// // ViewController.m // 06-通讯录(有界面) // #import "ViewController.h" #import <AddressB ...
- error: insufficient permissions for device(解决adb shell问题)
今天在linux下连接平板usb,试用adb shell时出现error: insufficient permissions for device, 而且我们输入adb devices显示: xxna ...
- ubuntu+nginx+laravel
1, 到http://v4.golaravel.com/docs/4.2/installation 点击下载最新版Laravel框架.然后解压 2,把laravel-master下的文件夹拷入到php ...