SPP(Spatial Pyramid Pooling)详解
一直对Fast RCNN中ROI Pooling层不解,不同大小的窗口输入怎么样才能得到同样大小的窗口输出呢,今天看到一篇博文讲得挺好的,摘录一下,方便查找。
Introduction
在一般的CNN结构中,在卷积层后面通常连接着全连接。而全连接层的特征数是固定的,所以在网络输入的时候,会固定输入的大小(fixed-size)。但在现实中,我们的输入的图像尺寸总是不能满足输入时要求的大小。然而通常的手法就是裁剪(crop)和拉伸(warp)。

这样做总是不好的:图像的纵横比(ratio aspect) 和 输入图像的尺寸是被改变的。这样就会扭曲原始的图像。而Kaiming He在这里提出了一个SPP(Spatial Pyramid Pooling)层能很好的解决这样的问题, 但SPP通常连接在最后一层卷基层。

SPP 显著特点
1) 不管输入尺寸是怎样,SPP 可以产生固定大小的输出
2) 使用多个窗口(pooling window)
3) SPP 可以使用同一图像不同尺寸(scale)作为输入, 得到同样长度的池化特征。
其它特点
1) 由于对输入图像的不同纵横比和不同尺寸,SPP同样可以处理,所以提高了图像的尺度不变(scale-invariance)和降低了过拟合(over-fitting)
2) 实验表明训练图像尺寸的多样性比单一尺寸的训练图像更容易使得网络收敛(convergence)
3) SPP 对于特定的CNN网络设计和结构是独立的。(也就是说,只要把SPP放在最后一层卷积层后面,对网络的结构是没有影响的, 它只是替换了原来的pooling层)
4) 不仅可以用于图像分类而且可以用来目标检测
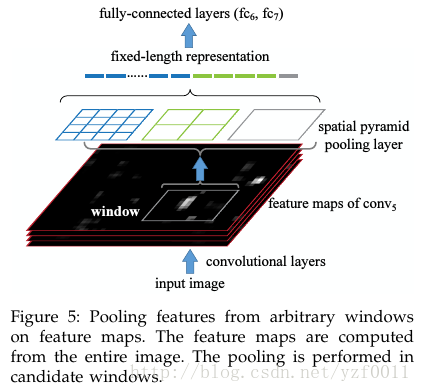
使用SPP的CNN
Convolutional Layers and Feature Maps
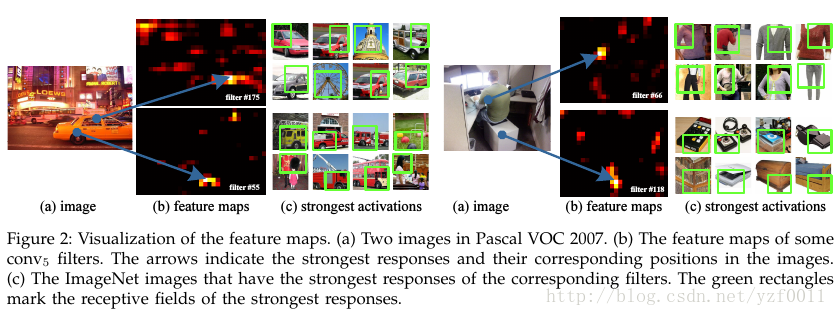
作者使用上图意在说明保留原图片的尺寸对实验的特征提取和结果都很重要
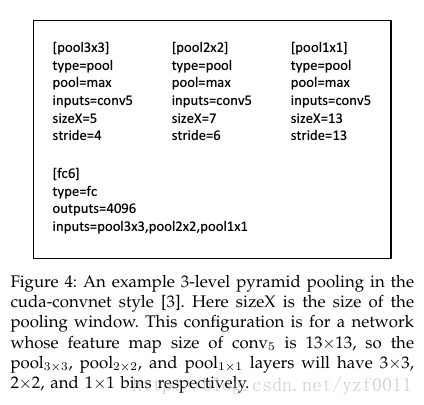
The Spatial Pyramid Pooling Layer

为什么会得固定大小的输出?
注意我们上面曾提到使用多个窗口(pooling窗口,上图中蓝色,青绿,银灰的窗口, 然后对feature maps 进行pooling,将分别得到的结果进行合并就会得到固定长度的输出), 这就是得到固定输出的秘密原因。
我们接下来用一个例子来弄懂这张图
Single-size network
我们先假定固定输入图像的尺寸s=224, 而此网络卷积层最后输出256层feature-maps, 且每个feature-map大小为13×13(a=13),全连接层总共256×(9+4+1)个神经元, 即输全连接层输入大小为256×(9+4+1)。即我们需要在每个feature-map得到一个数目为(f=9+4+1)的特征。
由于pooling窗口(w×ww×w)很明显如果我们用一个pooling窗口怎么也很难得到f=9+4+1,再加上如果输入图像尺度变化的话,是根本不可能。
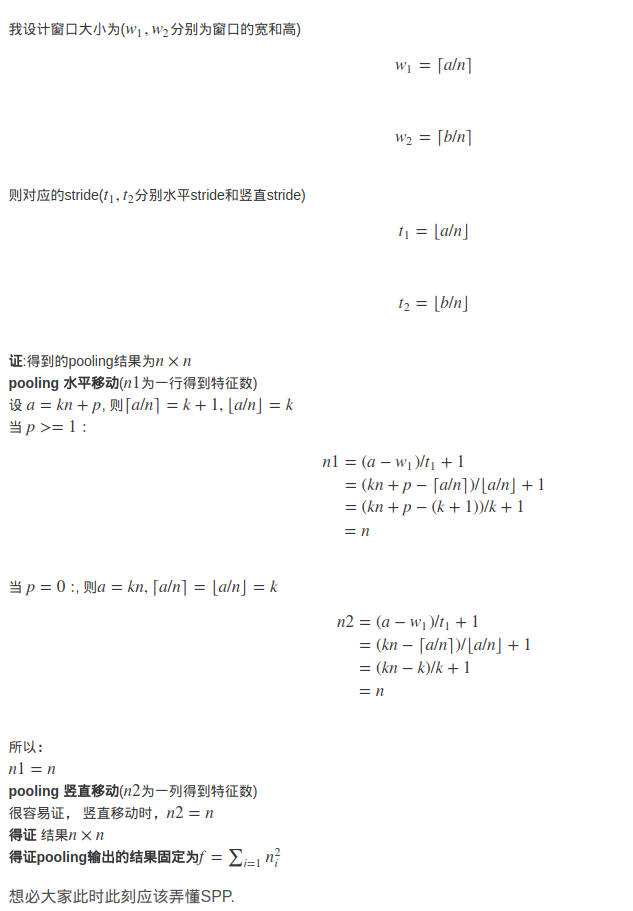
这里用了3个pooling窗口(w×w), 而对应的pooling stride 为t, 经多这3个窗口pooling池化得到3个n×n,n=3,2,1的结果。
饼画好了,怎么得到我们的窗口大小w和stride t呢?
n=2,n=1以此类推,将3个pooling后的结果合并,很容易发现和我们的期望一致。
muti-size training(证明其可能性)
有这一公理以及其推理:
公理: 任何一个数都可以写成若干个数的平方和。
推理: 任何一个数的平方(为一个数)可以表达成若干个数的平方和

由于我们的输入图像尺寸是多样的,致使我们在最后一层得到的每个featrue-map大小为a×b(a 和 b大小是可变的)且feature-maps数为c,我们全连接层的输入为c×f, 也就是我们每个feature-map 要得到f个特征。
由公理可得
SPP分类
作者在分类的时候得到如下几个结果
1) 多窗口的pooling会提高实验的准确率
2) 输入同一图像的不同尺寸,会提高实验准确率(从尺度空间来看,提高了尺度不变性(scale invariance))
3) 用了多View(multi-view)来测试,也提高了测试结果
4)图像输入的尺寸对实验的结果是有影响的(因为目标特征区域有大有有小)
5)因为我们替代的是网络的Poooling层,对整个网络结构没有影响,所以可以使得整个网络可以正常训练。
SPP目标检测
是基于RCNN而改进的,现在有比其更快的Fast-RCNN, 和Faster-RCNN。我们在这里主要提出论文中的重要的点。
1) 在目标检测中,许多实验可以从feature-maps中使用窗口,来提取目标特征。见原文描述:
regions of the feature maps, while R-CNN extracts directly from image regions. In previous works, the Deformable Part Model (DPM) [23] extracts features from windows in HOG [24] feature maps, and the Selective Search (SS) method [20] extracts from win- dows in encoded SIFT feature maps. The Overfeat detection method [5] also extracts from windows of deep convolutional feature maps, but needs to pre- define the window size. On the contrary, our method enables feature extraction in arbitrary windows from the deep convolutional feature maps.
2)接下来分析目标检测的整体过程:
从上面的描述,我们应该懂了作者的意思。作者是整体先对整张图片进行卷积然后,在把其中的目标窗口拿出来Pooling,得到的结果用作全连接层的输入。
特点:只需要计算一次卷积层,训练速度快。
文章转自: https://blog.csdn.net/yzf0011/article/details/75212513
SPP(Spatial Pyramid Pooling)详解的更多相关文章
- 空间金字塔池化(Spatial Pyramid Pooling, SPP)原理和代码实现(Pytorch)
想直接看公式的可跳至第三节 3.公式修正 一.为什么需要SPP 首先需要知道为什么会需要SPP. 我们都知道卷积神经网络(CNN)由卷积层和全连接层组成,其中卷积层对于输入数据的大小并没有要求,唯一对 ...
- Spatial pyramid pooling (SPP)-net (空间金字塔池化)笔记(转)
在学习r-cnn系列时,一直看到SPP-net的身影,许多有疑问的地方在这篇论文里找到了答案. 论文:Spatial Pyramid Pooling in Deep Convolutional Net ...
- 空间金字塔池化(Spatial Pyramid Pooling,SPP)
基于空间金字塔池化的卷积神经网络物体检测 原文地址:http://blog.csdn.net/hjimce/article/details/50187655 作者:hjimce 一.相关理论 本篇博文 ...
- 目标检测--Spatial pyramid pooling in deep convolutional networks for visual recognition(PAMI, 2015)
Spatial pyramid pooling in deep convolutional networks for visual recognition 作者: Kaiming He, Xiangy ...
- Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition
Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition Kaiming He, Xiangyu Zh ...
- 深度学习论文翻译解析(九):Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition
论文标题:Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition 标题翻译:用于视觉识别的深度卷积神 ...
- 利用pytorch复现spatial pyramid pooling层
sppnet不讲了,懒得写...直接上代码 from math import floor, ceil import torch import torch.nn as nn import torch.n ...
- SPPNet论文翻译-空间金字塔池化Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition
http://www.dengfanxin.cn/?p=403 原文地址 我对物体检测的一篇重要著作SPPNet的论文的主要部分进行了翻译工作.SPPNet的初衷非常明晰,就是希望网络对输入的尺寸更加 ...
- SPP Net(Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition)论文理解
论文地址:https://arxiv.org/pdf/1406.4729.pdf 论文翻译请移步:http://www.dengfanxin.cn/?p=403 一.背景: 传统的CNN要求输入图像尺 ...
随机推荐
- PAT甲 1009. Product of Polynomials (25) 2016-09-09 23:02 96人阅读 评论(0) 收藏
1009. Product of Polynomials (25) 时间限制 400 ms 内存限制 65536 kB 代码长度限制 16000 B 判题程序 Standard 作者 CHEN, Yu ...
- Informatica增量抽取时间的设置
使用数据库或者系统变量的当前时间 Informatica中的$$SYSDATE是表示当前系统时间的系统变量. 通过这个变量,我们对每天抽取的数据可以使用以下表达式来实现增量抽取: 时间戳字段>= ...
- java编程中Properties类的具体作用和使用!
如果不熟悉 java.util.Properties类,那么现在告诉您它是用来在一个文件中存储键-值对的,其中键和值是用等号分隔的.(如清单 1 所示).最近更新的java.util.Properti ...
- 一、配置etcd数据库
etcd服务作为Kubernetes集群的主数据库,在安装Kubernetes各服务之前需要首先安装和启动. 1. 安装etcd yum -y install etcd 2. 修改etcd配置文件 ...
- C# npoi 从excel导入datagridviews 批量联网核查
DataSet ds = new DataSet(); OpenFileDialog openFileDialog = new OpenFileDialog(); openFileDialog.Fil ...
- ASP.NET Core 装X利器SignalR:电子画板
电子画板开发需求 教师端需求: 教师登录后能创建房间(教室) 学生加入房间后有通知提醒 教师能够解散房间 基本的画板功能 学生端需求: 能够切换不同在线的房间 能够收到新建房间的通知 能够收到房间 ...
- Easyui datagrid绑定数据,新增,修改,删除写法
@{ ViewBag.Title = "xw_xsfl"; } <script type="text/javascript"> var editIn ...
- CSS2.1SPEC:视觉格式化模型之width属性详解(下)
本文承接CSS2.1SPEC:视觉格式化模型之width属性详解(上),继续分析CSS视觉格式化模型中width以及相关值的计算问题: 注:与上节不同,本节的demo中由于出现了float,absol ...
- CRUD组件的高阶使用
1.list页面自定列显示: class PermissionConfig(sites.AryaConfig): def dabo(self, obj=None, is_header=Fa ...
- Canvas+Js制作动量守恒的小球碰撞
目的:通过js实现小球碰撞并实现动量守恒 canvas我们就不多说了,有用着呢. 我们可以通过canvas画2D图形(圆.方块.三角形等等)3D图形(球体.正方体等待). 当然这只是基础的皮毛而已,c ...