Bellman-Ford算法与SPFA算法详解
PS:如果您只需要Bellman-Ford/SPFA/判负环模板,请到相应的模板部分
上一篇中简单讲解了用于多源最短路的Floyd算法。本篇要介绍的则是用与单源最短路的Bellman-Ford算法和它的一些优化(包括已死的SPFA)
Bellman-Ford算法
其实,和Floyd算法类似,Bellman-Ford算法同样是基于DP思想的,而且也是在不断的进行松弛操作(可以理解为「不断放宽对结果的要求」,比如在Floyd中就体现为不断第一维\(k\),具体解释在这里)
既然是单源最短路径问题,我们就不再需要在DP状态中指定起始点。于是,我们可以设计出这样的DP状态(和Floyd很类似):
\]
显然,初始值为:
\]
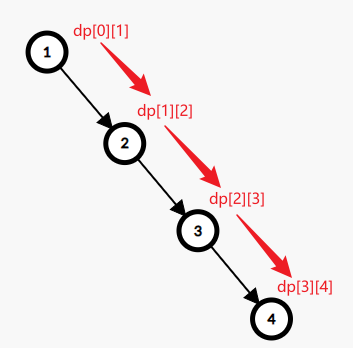
我们可以先考虑,如何从\(dp[0][u]\)转移出\(dp[1][u]\)(就是多一条边)。
于是很容易想到这个最显而易见又最暴力的方法:枚举每一条边\((u, v)\),并更新\(dp[1][v]=min(dp[1][v], dp[0][u]+w[u][v])(其中w[u][v]表示这条边的边权)\)
推广到任意\(dp[k-1][u]\)到\(dp[k][u]\)的转移,我们仍然可以使用这样的方法。
下面是代码实现:
struct Edge {
int u, v; // 边的两个端点
int w; // 边的权值
};
int n; // 点数
int m; // 边数
Edge e[MAXM]; // 所有的边
int dp[MAXN][MAXN]; // 解释见上方
void bellman_ford(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化为INF
dp[0][start] = 0;
for(int i = 1; i < n; i++) { // 一张图中的最长路径最多只包含n - 1边,所以更新n - 1遍就够了(因为点不能重复)
for(int j = 1; j <= n; j++) { // 先复制一遍
dp[i][j] = dp[i - 1][j];
}
for(int j = 1; j <= m; j++) { // 枚举每一条边
dp[i][e[j].v] = min(dp[i][e[j].v], dp[i - 1][e[j].u] + e[j].w);
}
}
}
显然,时间复杂度为\(O(nm)\),空间复杂度也是\(O(nm)\),代码复杂度为O(1)。
我们可以先考虑优化空间复杂度(压缩掉第一维\(k\)),于是,DP状态变为:
\]
转移方程为:
\]
关于状态压缩后的正确性:最有可能令人不理解的部分就是:在同一轮更新中,我们可能会用已经更新完的值再去更新别的值。这就导致,同一论更新中,不同节点被更新到的DP值对应的\(k\)可能不同。(如果没看懂,就看下面这张图)
但是实际上,我们其实并不关心到底走了几步,而只关心最短路的边权和。所以,像这样的“错位更新”并不会引起错误。
于是,我们可以得到新的代码:
struct Edge {
int u, v; // 边的两个端点
int w; // 边的权值
};
int n; // 点数
int m; // 边数
Edge e[MAXM]; // 所有的边
int dp[MAXN]; // 解释见上方
void bellman_ford(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化为INF
dp[start] = 0;
for(int i = 1; i < n; i++) { // 一张图中的最长路径最多只包含n - 1边,所以更新n - 1遍就够了(因为点不能重复)
for(int j = 1; j <= m; j++) { // 枚举每一条边
dp[e[j].v] = min(dp[e[j].v], dp[e[j].u] + e[j].w);
}
}
}
我们可以继续考虑优化时间复杂度。显然,如果在某一轮的更新后,发现并没有任何一个值被更新,那么就意味着:这张图已经不能再被更新了(已经求出\(s\)到每个点的最短路),那就可以直接break了。
所以,优化后的代码如下:
Bellman-Ford算法模板
struct Edge {
int v; // 边指向的节点
int w; // 边的权值
};
int n; // 点数
int m; // 边数
vector<Edge> g[MAXN]; // 保存从每个节点发出的边
int dp[MAXN]; // 解释见上方
void bellman_ford(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化为INF
dp[start] = 0;
for(int i = 1; i < n; i++) { // 一张图中的最长路径最多只包含n - 1边,所以更新n - 1遍就够了(因为点不能重复)
bool updated = 0; // 记录是否有节点被更新
for(int i = 1; i <= n; i++) { // 枚举每一个节点
if(dp[i] == 0x3f3f3f3f) { // 无法到达的节点
continue;
}
for(Edge &e : g[i]) { // 枚举从这个节点发出的每一条边
if(dp[i] + e.w < dp[e.v]) {
dp[e.v] = dp[i] + e.w;
updated = 1; // 标记有值被更新
}
}
}
if(!updated) {
break; // 没有节点被更新,直接退出
}
}
}
这就是最常见的Bellman-Ford朴素算法了。
同时,也可以看到,本次优化后的代码中将「直接储存所有边」的方式改为了使用「邻接表」。这是因为邻接表在图论算法中更加常用,也使得Bellman-Ford算法可以更容易地和其他算法配合使用。
SPFA算法
SPFA算法(Shortest Path Faster Algorithm),顾名思义就是一种让Bellman-Ford跑得更快的方法。
在上一部分的最后,我们对于没有更新的情况,直接break掉,来优化时间。但是,稍加思考就会发现:有的时候,我们会为了唯一几个被更新过的节点,而再把所有的节点遍历一遍,那么这样就会产生时间的浪费。所以,SPFA本质上就是使用队列来解决这样的问题。
下面是SPFA算法的基本步骤:
我们先设置好初始值(和Bellman-Ford一样),再将起点(\(s\))加入队列中。
每次从队列中取出一个节点,尝试用它去更新与它相连的节点;如果某个节点的最短距离被更新了,那么将这个节点加入队列。
回到步骤2
于是,很容易写出对应的代码:
SPFA算法模板
struct Edge {
int v; // 边指向的节点
int w; // 边的权值
};
int n; // 点数
int m; // 边数
vector<Edge> g[MAXN]; // 保存从每个节点发出的边
int dp[MAXN]; // 定义没有变
queue<int> q; // 储存点用的队列
bool vis[MAXN]; // 记录每个节点当前是否在队列中
void spfa(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化为INF
dp[start] = 0;
q.push(start);
vis[start] = 1; // 标记一下
while(!q.empty()) {
int x = q.front(); // 取出一个节点
q.pop();
vis[x] = 0; // 清除标记,因为下次还有可能入队
for(Edge &e : g[x]) { // 枚举从这个节点发出的每一条边
if(dp[x] + e.w < dp[e.v]) {
dp[e.v] = dp[x] + e.w;
if(!vis[e.v]) { // 如果这个节点现在不在队列中
q.push(e.v); // 那就把它加入队列
vis[e.v] = 1; // 标记一下
}
}
}
}
}
一道测试用的例题:P4779 【模板】单源最短路径(标准版)
Bellman-Ford & SPFA判断负环
负环,就是边权和为负数的环。负环是最短路算法中一个很重要的问题,因为只要进入一个负环,最短距离就会无限减小。当然,这肯定不是我们希望的,所以接下来就要介绍如何使用Bellman-Ford算法或SPFA算法来判断一张图中是否包含负环。
显然,一张有向图上的任意一条简单路径最多只包含\(n-1\)条边(否则不可能是 简单 的)。而且,当图中没有负环时,两点间的最短路径一定是简单路径。所以,如果发现从起点到某个节点\(u\)的最短路径包含多于\(n-1\)条边,那么这条路径上一定包含负环。
所以,我们只需要在算法中添加一些简单的判断就可以实现判负环了。
具体方法:
对于普通的Bellman_ford算法,我们可以在完成DP后,在进行一遍更新,如果存在任意节点与起点之间的最短路径是可以被更新的,那么可以确定图中一定存在负环
对于SPFA算法,我们可以在更新最短路径的同时,记录每条最短路径上的边数,如果发现某条最短路径的边数大于\(n-1\),那么可以确定图中一定存在负环
于是,我们可以写出分别使用这两种算法来判负环的代码:
Bellman-Ford判负环模板
struct Edge {
int v; // 边指向的节点
int w; // 边的权值
};
int n; // 点数
int m; // 边数
vector<Edge> g[MAXN]; // 保存从每个节点发出的边
int dp[MAXN];
bool bellman_ford_check_ncycle(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化为INF
dp[start] = 0;
for(int i = 1; i < n; i++) { // 一张图中的最长路径最多只包含n - 1边,所以更新n - 1遍就够了(因为点不能重复)
bool updated = 0; // 记录是否有节点被更新
for(int i = 1; i <= n; i++) { // 枚举每一个节点
if(dp[i] == 0x3f3f3f3f) { // 无法到达的节点
continue;
}
for(Edge &e : g[i]) { // 枚举从这个节点发出的每一条边
if(dp[i] + e.w < dp[e.v]) {
dp[e.v] = dp[i] + e.w;
updated = 1; // 标记有值被更新
}
}
}
if(!updated) {
return 0; // 没有节点被更新,一定没有负环
}
}
for(int i = 1; i <= n; i++) { // 枚举每一个节点
if(dp[i] == 0x3f3f3f3f) { // 无法到达的节点
continue;
}
for(Edge &e : g[i]) { // 枚举从这个节点发出的每一条边
if(dp[i] + e.w < dp[e.v]) {
return 1; // 还能被更新说明有负环
}
}
}
return 0;
}
SPFA判负环模板
struct Edge {
int v; // 边指向的节点
int w; // 边的权值
};
int n; // 点数
int m; // 边数
vector<Edge> g[MAXN]; // 保存从每个节点发出的边
int dp[MAXN]; // dp的定义没有变
int cnt[MAXN]; // 记录从起点到节点u的最短路径中的边数
queue<int> q; // 储存点用的队列
bool vis[MAXN]; // 记录每个节点当前是否在队列中
bool spfa_check_ncycle(int start) { // SPFA判负环
memset(dp, 0x3f, sizeof(dp)); // 初始化为INF
dp[start] = 0;
q.push(start);
vis[start] = 1; // 标记一下
while(!q.empty()) {
int x = q.front(); // 取出一个节点
q.pop();
vis[x] = 0; // 清除标记,因为下次还有可能入队
for(Edge &e : g[x]) { // 枚举从这个节点发出的每一条边
if(dp[x] + e.w < dp[e.v]) {
dp[e.v] = dp[x] + e.w;
cnt[e.v] = cnt[e.v] + 1; // 多了当前这条边
if(cnt[e.v] >= n) { // 从起点到v的最短路径上有多于n - 1条边
return 1; // 一定出现了负环
}
if(!vis[e.v]) { // 如果这个节点现在不在队列中
q.push(e.v); // 那就把它加入队列
vis[e.v] = 1; // 标记一下
}
}
}
}
return 0; // 没有负环
}
一道测试用的例题:P3385 【模板】负环
Bellman-Ford算法与SPFA算法详解的更多相关文章
- 数据结构与算法--最短路径之Bellman算法、SPFA算法
数据结构与算法--最短路径之Bellman算法.SPFA算法 除了Floyd算法,另外一个使用广泛且可以处理负权边的是Bellman-Ford算法. Bellman-Ford算法 假设某个图有V个顶点 ...
- SSD算法及Caffe代码详解(最详细版本)
SSD(single shot multibox detector)算法及Caffe代码详解 https://blog.csdn.net/u014380165/article/details/7282 ...
- python 排序算法总结及实例详解
python 排序算法总结及实例详解 这篇文章主要介绍了python排序算法总结及实例详解的相关资料,需要的朋友可以参考下 总结了一下常见集中排序的算法 排序算法总结及实例详解"> 归 ...
- 最短路径——Bellman-Ford算法以及SPFA算法
说完dijkstra算法,有提到过朴素dij算法无法处理负权边的情况,这里就需要用到Bellman-Ford算法,抛弃贪心的想法,牺牲时间的基础上,换取负权有向图的处理正确. 单源最短路径 Bellm ...
- Bellman-ford算法、SPFA算法求解最短路模板
Bellman-ford 算法适用于含有负权边的最短路求解,复杂度是O( VE ),其原理是依次对每条边进行松弛操作,重复这个操作E-1次后则一定得到最短路,如果还能继续松弛,则有负环.这是因为最长的 ...
- 关联规则算法(The Apriori algorithm)详解
一.前言 在学习The Apriori algorithm算法时,参考了多篇博客和一篇论文,尽管这些都是很优秀的文章,但是并没有一篇文章详解了算法的整个流程,故整理多篇文章,并加入自己的一些注解,有了 ...
- SSD(single shot multibox detector)算法及Caffe代码详解[转]
转自:AI之路 这篇博客主要介绍SSD算法,该算法是最近一年比较优秀的object detection算法,主要特点在于采用了特征融合. 论文:SSD single shot multibox det ...
- 算法笔记--sg函数详解及其模板
算法笔记 参考资料:https://wenku.baidu.com/view/25540742a8956bec0975e3a8.html sg函数大神详解:http://blog.csdn.net/l ...
- Floyd算法(三)之 Java详解
前面分别通过C和C++实现了弗洛伊德算法,本文介绍弗洛伊德算法的Java实现. 目录 1. 弗洛伊德算法介绍 2. 弗洛伊德算法图解 3. 弗洛伊德算法的代码说明 4. 弗洛伊德算法的源码 转载请注明 ...
随机推荐
- linux篇-rpm包安装mysql数据库
3.1上传以下两个rpm包到服务器上 MySQL-server-5.6.27-1.el6.x86_64.rpm MySQL-client-5.6.27-1.el6.x86_64.rpm 3.2卸载一个 ...
- C#实现找二维数组中的鞍点
鞍点定义:该位置上的元素值在行中最大,在该列上最小 代码示例: using System; using System.Collections.Generic; using System.Linq; u ...
- Servlet表单数据
1.GET 方法 GET 方法向页面请求发送已编码的用户信息.页面和已编码的信息中间用 ? 字符分隔,如下所示: http://www.test.com/hello?key1=value1&k ...
- TypeError: this.getOptions is not a function
我在vue ui界面中安装版本依赖包后报这个错误 less-loader/sass-loader安装的版本过高 解决办法 删除原有的版本依赖包,安装更低版本的依赖包. 如 @6.0.1为选择安装的版本 ...
- Docker 与 K8S学习笔记(二十三)—— Kubernetes集群搭建
小伙伴们,好久不见,这几个月实在太忙,所以一直没有更新,今天刚好有空,咱们继续k8s的学习,由于我们后面需要深入学习Pod的调度,所以我们原先使用MiniKube搭建的实验环境就不能满足我们的需求了, ...
- Python使用EasyOCR库对行程码图片进行OCR文字识别介绍与实践
关注「WeiyiGeek」点我,点我 设为「特别关注」,每天带你在B站玩转网络安全运维.应用开发.物联网IOT学习! 希望各位看友[关注.点赞.评论.收藏.投币],助力每一个梦想. 文章目录 0x00 ...
- Jmeter(五十三) - 从入门到精通高级篇 - 懒人教你在Linux系统中安装Jmeter(详解教程)
1.简介 我们绝大多数使用的都是Windows操作系统,因此在Windows系统上安装JMeter已经成了家常便饭,而且安装也相对简单,但是服务器为了安全.灵活小巧,特别是前几年的勒索病毒,现在绝大多 ...
- 【C#/VB.NET】 将PDF转为SVG/Image, SVG/Image转PDF
SVG是一种图形文件格式,它的英文全称为Scalable Vector Graphics,意思为可缩放的矢量图形.它在放大或者改变尺寸的情况下其图形质量不会有所损失,且与 JPG 和 GIF 图像比起 ...
- 软件成分分析(SCA)完全指南
上一篇文章中,我们讨论了 DAST 的概念.重要性及其工作原理.那在开发过程中如何查找开源软件包中的漏洞并学习如何修复?本指南带你一起了解 SCA 工具及其最佳实践. 如今,绝大多数代码驱动的应用程序 ...
- 记安装AWVS14过程踩的坑
由于之前的AWVS14用着用着无法扫描了,一扫就是失败,一气之下就重装系统了.重装系统后发现安装还是不行,折腾了好久,终于找到方法了. 安装acunetix_14.1.210324124.exe 没啥 ...