s函数中积分程序更改
function [sys,x0,str,ts,simStateCompliance] = int_hyo(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 1;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
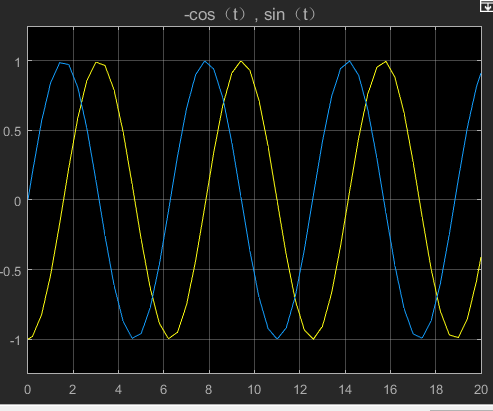
x0 = [-1]; %之前这里是0,改为1,应为x0代表-cos(t)在0初始时刻应该为-1
str = [];
ts = [0 0];
simStateCompliance = 'UnknownSimState';
function sys=mdlDerivatives(t,x,u)
sys = u;
function sys=mdlUpdate(t,x,u)
sys=[];
function sys=mdlOutputs(t,x,u)
sys=x ;
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1; % Example, set the next hit to be one second later.
sys = t + sampleTime;
function sys=mdlTerminate(t,x,u)
sys = [];
simulink模型为
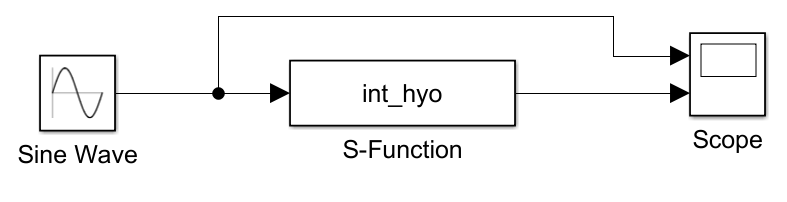
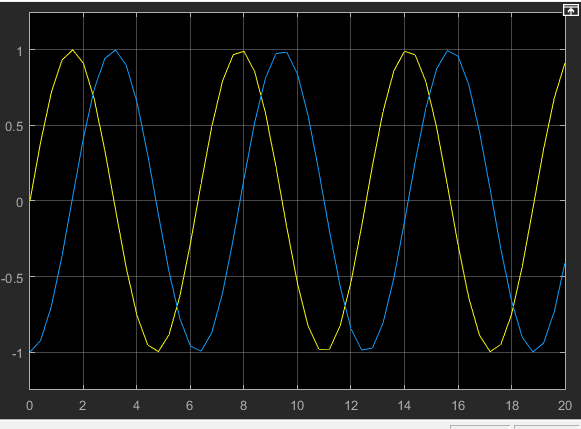
图像为
上面的x0 = [-1]; %之前这里是0,改为1,应为x0代表-cos(t)在0初始时刻应该为-1为什么这么改?
这是关于状态变量是什么的问题(x0表示状态变量,赋值是表示初始时刻状态变量的值),如果状态变量表示x = sin(t)时,这里为0,但是根据程序来看这里的状态变量选择的并不是x = sin(t),而是x = -cos(t),为什么这么说呢?
因为程序中调用了
function sys=mdlDerivatives(t,x,u)
sys = u;
function sys=mdlOutputs(t,x,u)
sys=x ;
输入(即sint(t))积分结果通过sys间接给了x状态变量,x是一个表示sin(t)积分后的变量,你想想这个状态变量到底是什么,不就是x = -cos(t)吗?如果不明白为什么积分后间接给x状态变量这句话,不要着急下面一篇文章能够让你清楚mdlDerivatives函数内部的原理
之前看到s函数那篇文章中积分这一节程序时,看到最后的图像感觉有问题,但是不知道程序中哪个地方出错了,主要还是不是很理解function sys=mdlDerivatives(t,x,u)的用法。看了一个博主的文章瞬间对这个子函数理解了,在这里将此博主的文章搬运过来便于阅读
原文链接:https://blog.csdn.net/qq_43159983/article/details/104644017
Matlab S函数 function sys=mdlDerivatives(t,x,u)
设函数为 h’’ = 1/J*(ut+dt)
1 s函数里 的x状态含义:
状态1: x(1) —表示状态值h
状态2: x(2) —表示状态值的导数(或称速度)h’
2 function sys=mdlDerivatives(t,x,u)
在控制系统中,该函数可用于描述微分方程,例如描述被控对象和自适应率等,并采用数值分析方法(如ODE方法)实现模型的自动求解。如下:
function sys=mdlDerivatives(t,x,u)
J=2;
dt=sin(t);
ut=u(1);
sys(1)=x(2);
sys(2)=1/J*(ut+dt); //注: 1/J*(ut+dt)为一个二阶导函数
function sys=mdlOutputs(t,x,u)
sys(1)=x(1);
sys(2)=x(2);
sys(1)根据x(2) 解出 函数里变量值 h ——状态1,即x(2)积分后赋给sys(1)。
sys(2)根据二阶导函数’1/J*(ut+dt)‘解出一阶导数 h’ ——状态2,即1/J*(ut+dt)积分后赋给sys(2)。
最后,sys通过中间变量x传输到Output的x里面。
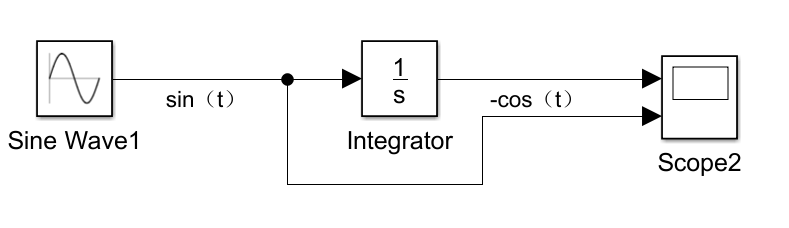
这里和simulink中的积分模块做下对比
simulink中的模型
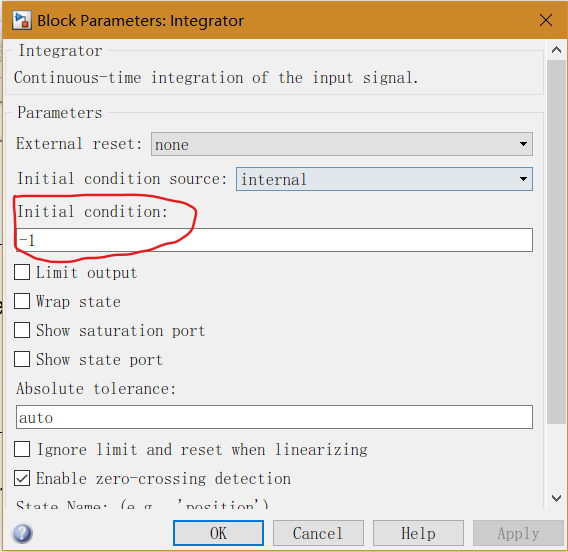
这里1/s模块内需要设置初始状态为-1(也是表示的-cos(t)初始时刻的值)
图像结果
s函数中积分程序更改的更多相关文章
- 重新认识Java中的程序入口即主函数各组成部分
主函数各组成部分深入理解 public static void main(String[] agrs) 主函数:是一个特殊的函数,作为程序的入口,可以被JVM调用 主函数的定义: public:代表着 ...
- linux中应用程序main函数中没有开辟进程的,它应该在那个进程中运行呢?
1.main函数是一个进程还是一个线程? 不知道你是用c创建的,还是用java创建的. 因为它们都是以main()做为入口开始运行的. 是一个线程,同时还是一个进程. 在现在的操作系统中,都是多线程的 ...
- C语言中的程序终止函数
在C语言的标准库<stdlib.h>中提供了一些与正常或者不正常的程序终止有关的函数,下面分别对其进行简单介绍. 参考文献: [1] C和指针,P298,342 [2] C程序设计语言现代 ...
- (转)Java程序利用main函数中args参数实现参数的传递
Java程序利用main函数中args参数实现参数的传递 1.运行Java程序的同时,可以通过输入参数给main函数中的接收参数数组args[],供程序内部使用!即当你在Java命令行后面带上参数,J ...
- 从Win32程序中的主函数中获取命令行参数
在标准C或者Win32控制台程序的main函数中,它们都有两个参数:"argc" 和 "argv",如下所示: int main(int argc, char ...
- 问题:C#控制台程序参数;结果:设置与读取C#控制台应用程序Main函数中的参数args
设置与读取C#控制台应用程序Main函数中的参数args 在项目属性面版->调试->命令行参数设置.空格分隔.读取:string[] str = Environment.GetComman ...
- 学习旧岛小程序 (5) observer 函数中修改属性的值
不要在一个属性的 observer 函数中修改属性的值 不然会造成内存泄露 错误代码: properties: { /* 期刊号 */ index: { type: String, observer ...
- C指针(2)——指针在函数中的应用(程序讲解)
3-1.c指针用作函数参数 #include<stdio.h> typedef unsigned char uint8_t; //类型自定义,通过typedef语句重新把unsigned ...
- 【spring 后台跳转前台】使用ajax访问的后台,后台正常执行,返回数据,但是不能进入前台的ajax回调函数中
问题: 使用ajax访问的后台,后台正常执行,并且正常返回数据,但是不能进入前台的ajax回调函数中 问题展示: 问题解决: 最后发现是因为后台的方法并未加注解:@ResponseBody,导致方法 ...
随机推荐
- CAS单点登录(一)——初识SSO
转载:https://blog.csdn.net/Anumbrella/article/details/80821486 一.初识CAS 首先我们来说一下CAS,CAS全称为Central Authe ...
- IntelliJ:自动生成JavaBean的读写方法
1.定义好一个class,其中写好private属性. 2.右键点击该class,在generate中选择自动根据模板生成的读写方法.
- 禁用所有控制台console.log()打印
在前端dev的环境下,经常会用到console.log()进行调试,以方便开发, 而在产品release的版本中,又不合适在浏览器的console中输出那么多的调试信息. 但是会经常因为没有删除这些开 ...
- Chapter08 面向对象(中级)
Chapter08 面向对象(中级) 8.1 IDEA的使用 1. 快捷键 删除当前行, 默认是 ctrl + Y 自己配置 ctrl + d 复制当前行, 自己配置 ctrl + alt + 向下光 ...
- JZ-066-机器人的运动范围
机器人的运动范围 题目描述 地上有一个m行和n列的方格.一个机器人从坐标0,0的格子开始移动,每一次只能向左,右,上,下四个方向移动一格,但是不能进入行坐标和列坐标的数位之和大于k的格子. 例如,当k ...
- 虚拟机服务启动失败报错npm ERR! code ELIFECYCLE
可能是由于node_modules模块中缺失或者某些东西冲突引起的,我们可以使用如下的方法解决这个: rm -rf node_modules 删除,不询问 rm package-lock.json 删 ...
- 联邦学习:按混合分布划分Non-IID样本
我们在博文<联邦学习:按病态独立同分布划分Non-IID样本>中学习了联邦学习开山论文[1]中按照病态独立同分布(Pathological Non-IID)划分样本. 在上一篇博文< ...
- 服务端&客户端注册进Eureka
目录 服务端(接口提供方) 创建项目 导入Eureka客户端POM 启动类添加注解 配置YML 暴漏接口 启动服务 集群 配置成功后页面如下 客户端(接口调用方) 修改Yml文件 配置类 启动类添加注 ...
- laravel 框架 ajax无页面刷新删除
....................HTML页面<!doctype html><html lang="en"><head> <meta ...
- linux定时任务 - crontab定时任务
crontab 定时任务命令 linux 系统则是由 cron (crond) 这个系统服务来控制的.Linux 系统上面原本就有非常多的计划性工作,因此这个系统服务是默认启动的.另 外, 由于使用者 ...