LQR (线性二次型调节器)的直观推导及简单应用
转自:https://blog.csdn.net/heyijia0327/article/details/39270597
本文主要介绍LQR的直观推导,说明LQR目标函数J选择的直观含义以及简单介绍矩阵Q,R的选取,最后总结LQR控制器的设计步奏,并将其应用在一个简单的倒立摆例子上。
假设有一个线性系统能用状态向量的形式表示成:
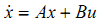
 ( 1 )
( 1 )
其中 

在介绍LQR前,先简单回顾一下现代控制理论中最基本的控制器--全状态反馈控制。
全状态反馈控制系统图形如下:
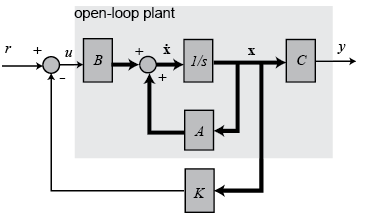
我们要设计一个状态反馈控制器

使得闭环系统能够满足我们期望的性能。我们把这种控制代入之前的系统状态方程得到
 ( 2 )
( 2 )
对于(1)式的开环系统,由现代控制理论我们知道开环传递函数的极点就是系统矩阵A的特征值。
(传递函数的分母是|s| -A|,|·|表示行列式)
现在变成了(2)的闭环形式,状态变换矩阵A变成了(A-BK)。因此通过配置反馈矩阵K,可以使得闭环系统的极点达到我们期望的状态。注意,这种控制器的设计与输出矩阵C,D没有关系。
那么,什么样的极点会使得系统性能很棒呢?并且,当系统变量很多的时候,即使设计好了极点,矩阵K也不好计算。
于是,LQR为我们设计最优控制器提供了一种思路。
在设计LQR控制器前,我们得设计一个能量函数,最优的控制轨迹应该使得该能量函数最小。一般选取如下形式的能量函数。
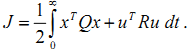
其中Q是你自己设计的半正定矩阵,R为正定矩阵。
可是,为什么能量函数(或称系统的目标函数)得设计成这个样子呢?
首先假设状态向量x(t)是1维的,那么

再来看看矩阵Q,R的选取,一般来说,Q值选得大意味着,要使得J小,那x(t)需要更小,也就是意味着闭环系统的矩阵(A-BK)的特征值处于S平面左边更远的地方,这样状态x(t)就以更快的速度衰减到0。另一方面,大的R表示更加关注输入变量u(t),u(t)的减小,意味着状态衰减将变慢。同时,Q为半正定矩阵意味着他的特征值非负,R为正定矩阵意味着它的特征值为正数。如果你选择Q,R都是对角矩阵的话,那么Q的对角元素为正数,允许出现几个0.R的对角元素只能是正数。
注意LQR调节器是将状态调节到0,这与轨迹跟踪不同,轨迹跟踪是使得系统误差为0。
轨迹跟踪实现方案线性二次型控制器(LQR)——轨迹跟踪器
知道了背景后,那如何设计反馈矩阵K使得能量函数J最小呢?
很多地方都是从最大值原理,Hamilton函数推导出来。这里用另外一种更容易接受的方式推导。
将u = -Kx 代入之前的能量函数得到:
 ( 3 )
( 3 )
为了找到K,我们先不防假设存在一个常量矩阵P使得:
 (4)
(4)
代入(3)式得:
 (5)
(5)
注意,我们已经假设闭环系统是稳定的,也就是t趋于无穷时,x(t)趋于0.
现在把(4)式左边的微分展开,并把状态变量x的微分用(2)式替代得到:
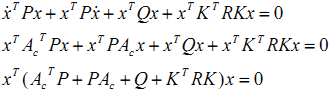
这个式子要始终成立的话,括号里的项必须恒等于0.

这是一个关于K的二次型等式,当然这个二次型是我们不愿看到的,因为计算复杂。现在只要这个等式成立,我们何必不选择K使得两个二次项正好约掉了呢?这样既符合了要求,又简化了计算。
取  代入上式得:
代入上式得:

K的二次项没有了,可K的取值和P有关,而P是我们假设的一个量,P只要使得的(6)式成立就行了。而(6)式在现代控制理论中极其重要,它就是有名的Riccati 方程。
现在回过头总结下LQR控制器是怎么计算反馈矩阵K的:
1.选择参数矩阵Q,R
2.求解Riccati 方程得到矩阵P
3.计算
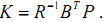
再看看LQR的结构图:
关于它的应用呢,比较典型的就是倒立摆控制器的设计。
倒立摆的状态变量为
A = [0 1 0 0
0 0 -1 0
0 0 0 1
0 0 9 0];
B = [0;0.1;0;-0.1];
C = [0 0 1 0]; %观测角度
D = 0; Q = [1 0 0 0
0 1 0 0
0 0 10 0
0 0 0 10
];
R = 0.1;
%由上面这个系统,可以计算出K
K = lqr(A,B,Q,R);
Ac = A - B*K;
%对系统进行模拟
x0 = [0.1;0;0.1;0]; %初始状态
t = 0:0.05:20;
u = zeros(size(t));
[y,x]=lsim(Ac,B,C,D,u,t,x0);
plot(t,y);
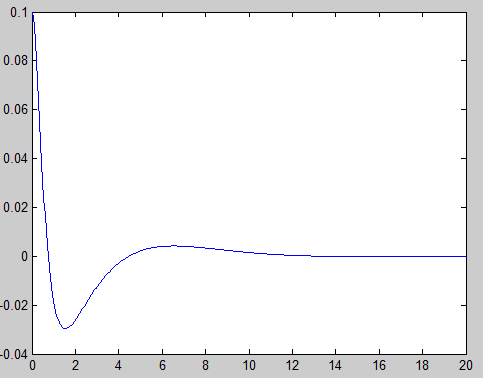
最后看到角度回到0,即平衡位置,控制器起到了作用,你可以选择不同的Q,R进行对比。
文章为总结性文章,有纰漏,请指出,谢谢。
reference:
1.F.L. Lewis .<< Linear Quadratic Regulator (LQR) State Feedback Design >>
2.http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace
3.http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace
LQR (线性二次型调节器)的直观推导及简单应用的更多相关文章
- GRU(Gated Recurrent Unit) 更新过程推导及简单代码实现
GRU(Gated Recurrent Unit) 更新过程推导及简单代码实现 RNN GRU matlab codes RNN网络考虑到了具有时间数列的样本数据,但是RNN仍存在着一些问题,比如随着 ...
- 线性二次型调节器LQR/LQC算法解析及求解器代码(matlab)
参考链接:http://120.52.51.14/stanford.edu/class/ee363/lectures/dlqr.pdf 本文参考讲义中的第20页PPT,根据Hamilton-Jacob ...
- BP神经网络的直观推导与Java实现
人工神经网络模拟人体对于外界刺激的反应.某种刺激经过人体多层神经细胞传递后,可以触发人脑中特定的区域做出反应.人体神经网络的作用就是把某种刺激与大脑中的特定区域关联起来了,这样我们对于不同的刺激就可以 ...
- Android -- 贝塞尔曲线公式的推导和简单使用
1,最近看了几个不错的自定义view,发现里面都会涉及到贝塞尔曲线知识,深刻的了解到贝塞尔曲线是进阶自定义view的一座大山,so,今天先和大家来了解了解. 2,贝塞尔曲线作用十分广泛,简单举几个的栗 ...
- Python3基础 生成器推导式 简单示例
Python : 3.7.0 OS : Ubuntu 18.04.1 LTS IDE : PyCharm 2018.2.4 Conda ...
- Python_迭代器、生成器、列表推导式,生成器表达式
1.迭代器 (1)可迭代对象 s1 = ' for i in s1: print(i) 可迭代对象 示例结果: D:\Python36\python.exe "E:/Python/课堂视频/ ...
- 神经网络前向后向传播(理论推导+代码) 单层神经网络相当于logistic regression
建立神经网络的主要步骤是: 1. 定义模型结构(例如输入特征的数量) 2. 初始化模型的参数 3. 循环: # 3.1 计算当前损失(正向传播) # 3.2 计算当前梯度(反向传播) # 3.3 更新 ...
- javaweb servlet jsp简单笔记
第二章: 1: web 俗称 : 万维网 www 2: web开发 的三大核心: HTML(网页) ,URL(定位),HTTP:(协议) 页面的分类: 静态页面: html+css 动态页面:jsp ...
- 【OI】关于快速幂的简单理解
都知道算某个数的幂需要线性的复杂度,为了优化复杂度,就出现了所谓的快速幂. 快速幂的代码很短,但是要原理需要一点心思. 首先,我们知道, a^b = a^c * a^d (c+d=b) 那么,不就可以 ...
随机推荐
- Oracle的发展历程
我们学习的是ORACLE(甲骨文)公司(就是收购Sun公司的甲骨文公司)的Oracle数据库(Oracle Database).Oracle数据库是关系型数据库中的大型数据库,存储量大,而且也非常安全 ...
- Maven目录结构, war目录结构
Maven目录结构 src/main/java 存放java servlet类文件 src/main/webapp 存放jsp文件 war目录结构 Maven web项目目录结构
- CentOS8安装Geant4笔记(一):Geant4介绍、编译和安装
前言 在服务器CentOS8.2上安装geant4软件. GEANT4 介绍 Geant4 是一个用于模拟粒子穿过物质的工具包.其应用领域包括高能.核物理和加速器物理,以及医学和空间科学研 ...
- 如何建立自己的代理IP池,减少爬虫被封的几率
如何建立自己的代理IP池,减少爬虫被封的几率 在爬虫过程中,难免会遇到各种各样的反爬虫,运气不好,还会被对方网站给封了自己的IP,就访问不了对方的网站,爬虫也就凉凉. 代理参数-proxies 首先我 ...
- linux文本编辑工具
文本编辑工具VIM vim 主要有三种工作模式,分别是命令模式.插入模式和编辑模式,输入 vim 文件名 我们可以进入命令模式,输入字符 i或者a或者o我们可以进入插入模式,进入插入模式之后我们可以进 ...
- php 23种设计模型 - 代理模式
代理模式(Proxy) 在代理模式(Proxy Pattern)中,一个类代表另一个类的功能.这种类型的设计模式属于结构型模式. 在代理模式中,我们创建具有现有对象的对象,以便向外界提供功能接口. 介 ...
- ASP.NET Core 6框架揭秘实例演示[21]:如何承载你的后台服务
借助 .NET提供的服务承载(Hosting)系统,我们可以将一个或者多个长时间运行的后台服务寄宿或者承载我们创建的应用中.任何需要在后台长时间运行的操作都可以定义成标准化的服务并利用该系统来承载,A ...
- mysql 完整备份和恢复
mysql 完整备份和恢复 一.MySQL完整备份操作 1.直接打包数据库文件夹 创建数据库auth: MariaDB [(none)]> create database auth;Quer ...
- 一文详解Redis键过期策略
摘要:Redis采用的过期策略:惰性删除+定期删除. 本文分享自华为云社区<Redis键过期策略详解>,作者:JavaEdge. 1 设置带过期时间的 key # 时间复杂度:O(1),最 ...
- info sharp Are you trying to install as a root or sudo user? Try again with the --unsafe-perm flag
执行 npm install 编译出错,提示 ERR! sharp EACCES: permission denied, mkdir '/root/.npm' info sharp Are you t ...