PID参数整定
PID参数整定方法很多,常见的工程整定方法有临界比例度法、衰减曲线法和经验法。云南昌晖仪表制造有限公司以图文形式介绍以临界比例度法和衰减曲线法整定调节器PID参数方法。
临界比例度法
一个调节系统,在阶跃干扰作用下,出现既不发散也不衰减的等幅震荡过程,此过程成为等幅振荡过程,如下图所示。此时PID调节器的比例度为临界比例度δk,被调参数的工作周期为为临界周期Tk。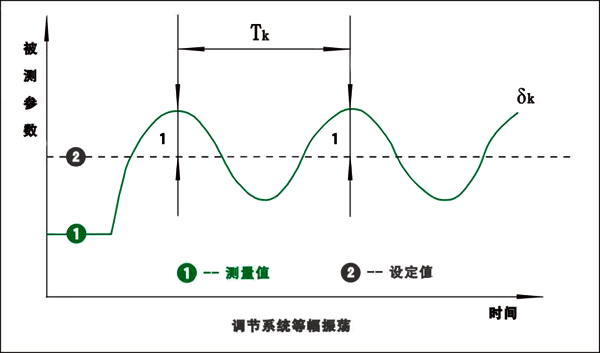
临界比例度法整定PID参数步骤
临界比例度法整定PID参数具体操作如下:
1、被控系统稳定后,把PID调节器的积分时间放到最大,微分时间放到零(相当于切除了积分和微分作用,只使用比例作用)。
2、通过外界干扰或使PID调节器设定值作一阶跃变化,观察由此而引起的测量值振荡。
3、从大到小逐步把PID调节器的比例度减小,看测量值振荡的变化是发散的还是衰减的,如是衰减的则应把比例度继续减小;如是发散的则应把比例度放大。
4、连续重复2和3步骤,直至测量值按恒定幅度和周期发生振荡,即持续4-5次等幅振荡为止。此时的比例度示值就是临界比例度δk。
5、从振荡波形图来看,来回振荡1次的时间就是临界周期Tk,即从振荡波的第一个波的顶点到第二个波的顶点的时间。如果有条件用记录仪,就比较好观察了,即可看振荡波幅值,还可看测量值输出曲线的峰-峰距离,把该测量值除以记录纸的走纸速度,就可计算出临界周期Tk;如果是DCS控制或使用无纸记录仪,在趋势记录曲线中可直接得出Tk。
临界比例度法PID参数整定经验公式
|
调节规律 |
调节器参数 |
||
|
比例度δ,单位:% |
积分时间Ti,单位:min |
微分时间Td,单位:min |
|
|
P |
2×δk |
--- |
--- |
|
PI |
2.2×δk |
0.85×Tk |
--- |
|
PD |
1.8×δk |
--- |
0.1×Tk |
|
PID |
1.7×δk |
0.5×Tk |
0.125×Tk |
6、将计算所得的调节器参数输入调节器后再次运行调节系统,观察过程变化情况。多数情况下系统均能稳定运行状态,如果还未达到理想控制状态,进需要对参数微调即可。
衰减曲线法
衰减曲线法整定调节器参数通常会按照4:1和10:1两种衰减方式进行,两种方法操作步骤相同,但分别适用于不同工况的调节器参数整定。
4:1衰减曲线法整定调节器参数
纯比例度作用下的自动调节系统,在比例度逐渐减小时,出现4:1衰减振荡过程,此时比例度为4:1衰减比例度δs,两个相邻同向波峰之间的距离为4:1衰减操作周期TS,如下图所示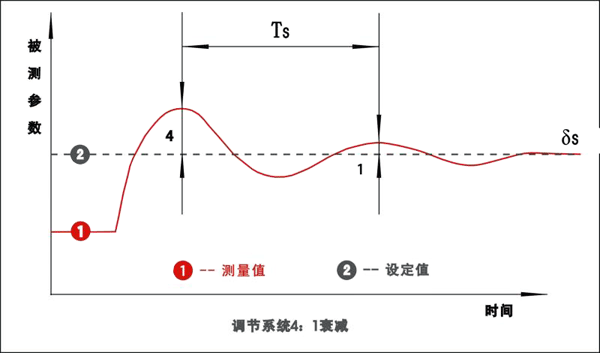
4:1衰减曲线法整定PID参数步骤
4:1衰减曲线法整定PID参数具体操作如下:
1、在闭合的控制系统中,将PID调节器变为纯比例作用,比例度放在较大的数值上。
2、系统达到稳定后,通过外界干扰或使PID调节器设定值作一阶跃变化,观察记录曲线的衰减比。
3、从大到小改变比例度,直至出现4:1衰减比为止,记下此时的比例度δs(叫4:1衰减比例度)并从曲线上得出衰减周期Ts(在4∶1曲线中为峰-峰时间)。对有些控制对象,控制过程进行较快,难以从记录曲线上找出衰减比。这时只要被控量波动2次就能达到稳定状态,可近似认为是4:1的衰减过程,其波动1次时间为Ts。
4、得到了衰减比例度Ps和衰减周期Ts后,就可根据表中的经验公式求出PID调节器的PID参数。
4:1衰减曲线法PID参数整定经验公式
|
调节规律 |
调节器参数 |
||
|
比例度δ,单位:% |
积分时间Ti,单位:min |
微分时间Td,单位:min |
|
|
P |
δs |
--- |
--- |
|
PI |
0.2×δs |
0.5×Ts |
--- |
|
PID |
0.8×δs |
0.3×Ts |
0.1×Ts |
5、将比例度放在比计算值略大的数值上,逐步引入积分和微分作用。
6、将比例度降至计算值上,观察运行,适当调整。
10:1衰减曲线法整定调节器参数
在部分调节系统中,由于采用4:1衰减比仍嫌振荡比较厉害,则可采用10:1的衰减过程,如下图所示。这种情况下由于衰减太快,要测量操作周期比较困难,但可测取从施加干扰开始至第一个波峰飞升时间Tr。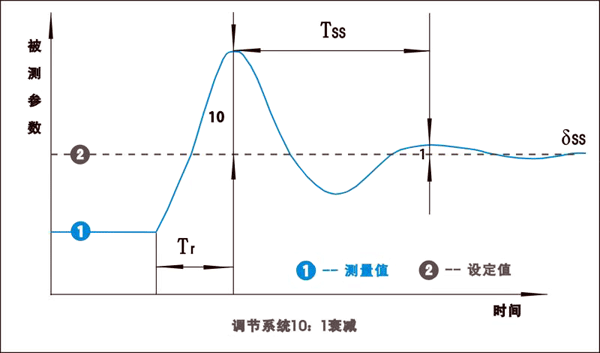
10:1衰减曲线法整定调节参数步骤和4:1衰减曲线法完全一致,仅采用的整定参数和经验公式不同。
10:1衰减曲线法PID参数整定经验公式
|
调节规律 |
调节器参数 |
||
|
比例度δ,单位:% |
积分时间Ti,单位:min |
微分时间Td,单位:min |
|
|
P |
δss |
--- |
--- |
|
PI |
1.2×δss |
2×Tr |
--- |
|
PID |
0.8×δss |
1.2×Tr |
0.4×Tr |
衰减曲线法比较简便,适用于一般情况下的各种参数的控制系统。但对于干扰频繁,记录曲线不规则,不断有小摆动时,由于不易得到正确的衰减比例度δs和衰减周期Ts,使得这种方法难于应用。
昌晖傻瓜式PID调节器YR-GFD和人工智能调节器YR-GND具有先进的PID控制算法和自整定功能,使用者启动仪表自整定功能后,不需要人工干预就可以自动算出最佳PID参数,控制无超调和欠调,PID参数还不用您手动设置,赶紧去看看哦!!
能熟练进行PID参数整定,将自动控制系统投自动,这代表着工程技术人员的自动化技能水平,但很多人并未真正掌握PID控制和PID参数整定。在本站“PID调节器”产品页面免费分享白志刚工程师编著的《自动调节系统解析与PID整定》一书,书中内容没有高深的理论公式,全是实战干货,理解了此书内容真谛,高中学历的仪表人也能整定PID参数,将PID控制弄透彻!对您有帮助,还是免费的,赶快去产品页面“PID调节器”免费领取这本书! 
PID参数整定的更多相关文章
- PID参数整定快速入门(调节器参数整定方法)
PID调节器参数整定方法很多,常见的工程整定方法有临界比例度法.衰减曲线法和经验法.云润仪表以图文形式分别介绍调节器参数整定方法. 临界比例度法一个调节系统,在阶跃干扰作用下,出现既不发散也不衰减的等 ...
- 我的四轴专用PID参数整定方法及原理---超长文慎入(转)
给四轴调了好久的PID,总算是调好了,现分享PID参数整定的心得给大家,还请大家喷的时候手下留情. 首先说明一下,这篇文章的主旨并不是直接教你怎么调,而是告诉你这么调有什么道理,还要告诉大家为什么'只 ...
- 增量式pid和位置式PID参数整定过程对比
//增量式PID float IncPIDCalc(PID_Typedef* PIDx,float SetValue,float MeaValue)//err»ý·Ö·ÖÀë³£Êý { PIDx-& ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- PID控制最通俗的解释与PID参数的整定方法
转自->这里 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解.阅读本文 ...
- PID控制算法的c语言实现十二 模糊PID的参数整定
这几天一直在考虑如何能够把这一节的内容说清楚,对于PID而言应用并没有多大难度,按照基本的算法设计思路和成熟的参数整定方法,就算是没有经过特殊训练和培训的人,也能够在较短的时间内容学会使用PID算法. ...
- PID参数调整的口诀
PID参数调整的口诀:参数整定找最佳,从小到大顺序查先是比例后积分,最后再把微分加曲线振荡很频繁,比例度盘要放大曲线漂浮绕大湾,比例度盘往小扳曲线偏离回复慢,积分时间往下降曲线波动周期长,积分时间再加 ...
- PID参数
大家奉上一篇关于PID算法及参数整定的知识! 1.位置表达式 位置式表达式是指任一时刻PID控制器输出的调节量的表达式. PID控制的表达式为 式中的y(t)为时刻t控制器输出的控制量,式中的y(0) ...
- PID参数调节口诀
参数整定找最佳, 从小到大顺序查. 先是比例后积分, 最后再把微分加. 曲线振荡很频繁, 比例度盘要放大. 曲线漂浮绕大弯, 比例度盘往小扳. 曲线偏离回复慢, 积分时间往下降. 曲线波动周期长, 积 ...
随机推荐
- Linux命令(ping-telnet-netstat-curl-ps)
转至:https://www.jianshu.com/p/577bbd15a6f8 1.ping命令 ping命令用来测试主机之间网络的连通性.执行ping指令会使用ICMP传输协议,发出要求回应的信 ...
- c++ stringstream 实现字符串与int之间的转换
#include <iostream> #include <sstream> using namespace std; int main() { //string转int st ...
- jieba:统计一篇文章中词语数
jieba官方文档 1.jieba分词的四种模式 精确模式.全模式.搜索引擎模式.paddle模式 精确模式:把文本精确的切分开,不存在冗余单词,适合文本分析: 全模式:把文本中所有可能的词语都扫描出 ...
- Anaconda Navigator:this application failed to start because it could not find or load ...windows in
原因:在Anaconda的根目录下,有一个叫 qt.conf的文件,用记事本或者Notepad打开 该问题是这些路径错误导致的(比如你把Anaconda挪动了位置,导致这里边的路径还是原来的位置). ...
- VS Code 启动占用100%Cpu问题解决办法
打开VS Code之后,点击文件->首选项->设置 search.followSymlinks
- Python 列表的(元素的删除)
del:根据索引值删除元素 del 可以删除列表中的单个元素,格式为: del listname[index] 其中,listname 表示列表名称,index 表示元素的索引值.del 也可以删除中 ...
- 面试官:Java中对象都存放在堆中吗?你知道逃逸分析?
面试官:Java虚拟机的内存分为哪几个区域? 我(微笑着):程序计数器.虚拟机栈.本地方法栈.堆.方法区 面试官:对象一般存放在哪个区域? 我:堆. 面试官:对象都存放在堆中吗? 我:是的. 面试官: ...
- JS类型判断&原型链
JS类型检测主要有四种 1.typeof Obj 2.L instanceof R 3.Object.prototype.toString.call/apply(); 4.Obj.constructo ...
- 『现学现忘』Docker常用命令 — 20、容器常用命令(二)
提示:接上一篇 目录 9.后台启动容器 10.查看容器日志 11.查看容器内运行的进程 12.查看容器内部细节 9.后台启动容器 后台启动容器也叫启动守护式容器. 命令:docker run -d 镜 ...
- Cocoapods插件机制浅析
原文链接 背景 虽然做iOS开发的过程中使用过 Cocoapods, 但是对里面的细节了解其实不算太多,直到这两年做织女项目时,通过对Cocoapods进行Qt支持改造才开始深入了解部分细节,这个过程 ...