OpenCV---图像二值化
一:什么是二值图像
彩色图像:三个通道0-,-,-,所以可以有2^24位空间 灰度图像:一个通道0-,所以有256种颜色 二值图像:只有两种颜色,黑和白,1白色,0黑色

二:图像二值化
(一)先获取阈值

(二)根据阈值去二值化图像

(三)OpenCV中的二值化方法

(四)补充阈值类型
原灰度图像的像素值

1.THRESH_BINARY:过门限的值为最大值,其他值为0


2.THRESH_BINARY_INV:过门限的值为0,其他值为最大值


3.THRESH_TRUNC:过门限的值为门限值,其他值不变


4.THRESH_TOZERO:过门限的值不变,其他设置为0


5.THRESH_TOZERO_INV:过门限的值为0,其他不变


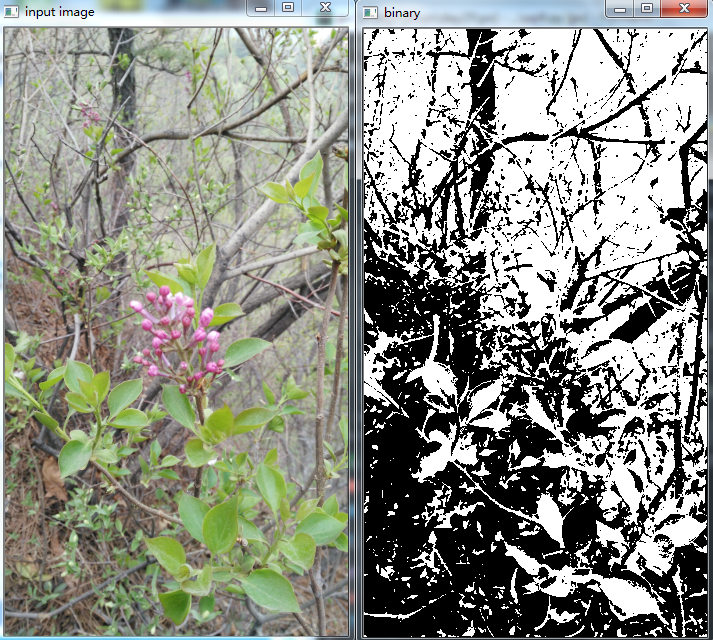
三:代码实现全局阈值
(一)全局阈值使用THRESH_OTSU大津法
def threshold_demo(image):
gray = cv.cvtColor(image,cv.COLOR_RGB2GRAY) #要二值化图像,要先进行灰度化处理
ret, binary = cv.threshold(gray,,,cv.THRESH_BINARY | cv.THRESH_OTSU)
print("threshold value: %s"%ret) #打印阈值,前面先进行了灰度处理0-255,我们使用该阈值进行处理,低于该阈值的图像部分全为黑,高于该阈值则为白色
cv.imshow("binary",binary) #显示二值化图像

threshold value: 140.0 #获取的阈值是140
(二)全局阈值使用THRESH_TRIANGLE(三角形算法)
ret, binary = cv.threshold(gray,,,cv.THRESH_BINARY | cv.THRESH_TRIANGLE)

threshold value: 67.0
(三)上面使用大津法和三角形算法都是自动去获取阈值,下面我们自己直接指定阈值
(1)THRESH_BINARY_INV大于阈值的都为0
ret, binary = cv.threshold(gray,,,cv.THRESH_BINARY_INV)

threshold value: 127.0
(2)THRESH_TRUNC截断大于127的值都为127
ret, binary = cv.threshold(gray,,,cv.THRESH_TRUNC)

(3)THRESH_TOZERO小于阈值的都为0和(1)相反
ret, binary = cv.threshold(gray,,,cv.THRESH_TOZERO)

相关知识补充
(1)threshold方法
①OpenC的threshold函数进行全局阈值。其函数原型为:threshold(src, thresh, maxval, type[, dst]) -> retval, dst
src参数表示输入图像(多通道,8位或32位浮点)。
thresh参数表示阈值。
maxval参数表示与THRESH_BINARY和THRESH_BINARY_INV阈值类型一起使用设置的最大值。
type参数表示阈值类型。
retval参数表示返回的阈值。若是全局固定阈值算法,则返回thresh参数值。若是全局自适应阈值算法,则返回自适应计算得出的合适阈值。
dst参数表示输出与src相同大小和类型以及相同通道数的图像。
②type参数阈值类型这部分参考博客:https://blog.csdn.net/iracer/article/details/49232703 ,写的很不错。
(2)cv.THRESH_OTSU类型
推文:OTSU算法
cv2.threshold函数是有两个返回值的, 第一个返回值,得到图像的阈值,
第二个返回值,也就是阈值处理后的图像,
cv.threshold(gray,,,cv.THRESH_BINARY | cv.THRESH_OTSU) #这是我们自己设置的
我们自己不一定能够找到一个最好的阈值,去二分化图像,所以我们需要算法自己去寻找一个阈值,而cv.THRESH_OTSU就可以满足这个需求,去找到一个最好的阈值。
注意:他非常适用于图像灰度直方图具有双峰的情况,他会在双峰之间找到一个值作为阈值,对于非双峰图像,可能并不是很好用。
因为cv.THRESH_OTSU方法会产生一个阈值,那么函数cv2.threshold的的第二个参数(设置阈值)就是0(None)了,并且在cv2.threshold的方法参数中还得加上语句cv2.THRESH_OTSU。
这里面第三个参数maxval参数表示与THRESH_BINARY和THRESH_BINARY_INV阈值类型一起使用设置的最大值。
而我们使用的灰度图像最大则为255,所以设置为255即可
(3)cv.THRESH_TRIANGLE类型(有丢失)适用于单个波峰
THRESH_OTSU flag, use Otsu algorithm to choose the optimal threshold value
THRESH_TRIANGLE flag, use Triangle algorithm to choose the optimal threshold value
ret, binary = cv.threshold(gray,,,cv.THRESH_BINARY | cv.THRESH_TRIANGLE)
(4)cv.THRESH_OTSU类型和cv.THRESH_TRIANGLE类型
THRESH_OTSU和THRESH_TRIANGLE和前面的说到的二值化方法组合使用,好处是不用自己指定thresh值,系统会进行计算并且作为返回值返回。
区别是:
THRESH_OTSU最适用于双波峰
THRESH_TRIANGLE最适用于单个波峰,最开始用于医学分割细胞等
四:代码实现局部阈值(更加清晰)
(一)ADAPTIVE_THRESH_MEAN_C
def local_threshold(image):
gray = cv.cvtColor(image,cv.COLOR_RGB2GRAY) #要二值化图像,要先进行灰度化处理
dst = cv.adaptiveThreshold(gray,,cv.ADAPTIVE_THRESH_MEAN_C,cv.THRESH_BINARY,,)
cv.imshow("local_threshold", dst)
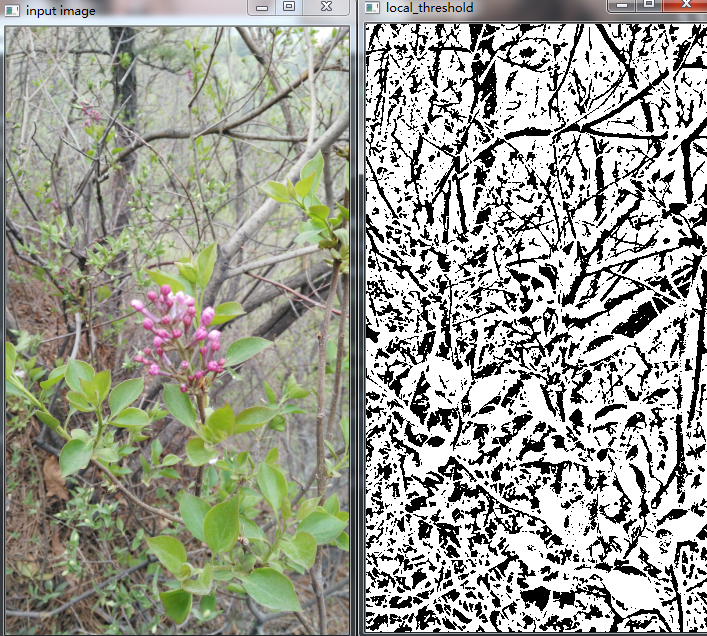
(二)ADAPTIVE_THRESH_GAUSSIAN_C轮廓更加清晰
dst = cv.adaptiveThreshold(gray,,cv.ADAPTIVE_THRESH_GAUSSIAN_C,cv.THRESH_BINARY,,)

相关知识补充
(1)adaptiveThreshold方法
def adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C, dst=None): # real signature unknown; restored from __doc__
OpenCV的adaptiveThreshold函数进行局部阈值。函数原型为:adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C[, dst]) -> dst src参数表示输入图像(8位单通道图像)。 maxValue参数表示使用 THRESH_BINARY 和 THRESH_BINARY_INV 的最大值. adaptiveMethod参数表示自适应阈值算法,平均 (ADAPTIVE_THRESH_MEAN_C)或高斯(ADAPTIVE_THRESH_GAUSSIAN_C)。
thresholdType参数表示阈值类型,必须为THRESH_BINARY或THRESH_BINARY_INV的阈值类型。 blockSize参数表示块大小(奇数且大于1,比如3,,........ )。 C参数是常数,表示从平均值或加权平均值中减去的数。 通常情况下,这是正值,但也可能为零或负值。
在使用平均和高斯两种算法情况下,通过计算每个像素周围blockSize x blockSize大小像素块的加权均值并减去常量C即可得到自适应阈值。
如果使用平均的方法,则所有像素周围的权值相同;
如果使用高斯的方法,则每个像素周围像素的权值则根据其到中心点的距离通过高斯方程得到。
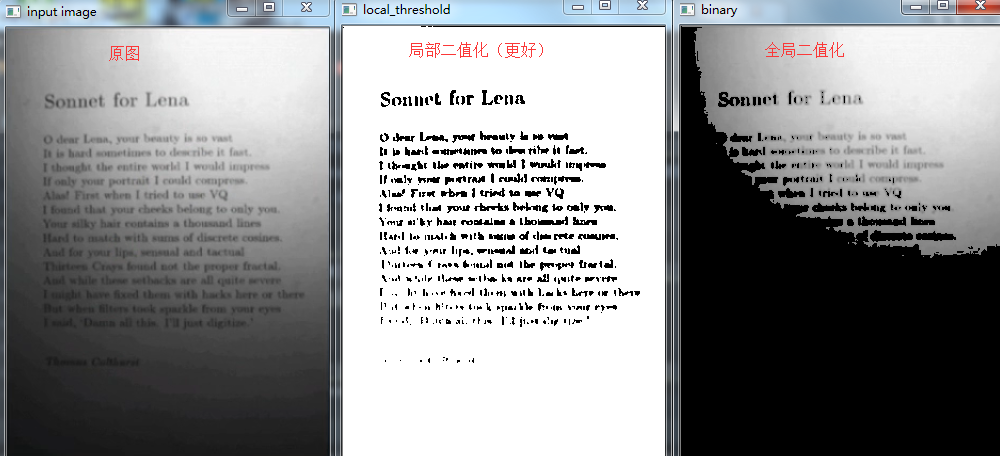
五:全局和局部的比较
六:自己计算阈值
def custom_threshold(image):
gray = cv.cvtColor(image,cv.COLOR_RGB2GRAY) #要二值化图像,要先进行灰度化处理
h,w=gray.shape[:] #求宽高
m = np.reshape(gray,[,w*h]) #将图像转一维数组,一行,w*h列,转换维度要保证其size不变
mean = m.sum() / (w*h) #求平均值来当做阈值,来分割图像
print("mean :",mean)
ret,binary = cv.threshold(gray,mean,,cv.THRESH_BINARY)
cv.imshow("binary",binary)
相关知识补充:
(1)reshape方法
def reshape(a, newshape, order='C'):
numpy的reshape函数是给数组一个新的形状而不改变其数据,函数原型:reshape(a, newshape, order='C') a参数表示需要重新形成的原始数组。 newshape参数表示int或int类型元组(tuple),若为(, ),表示生成的新数组是1行3列。 order参数表表示使用此索引顺序读取a的元素,并使用此索引顺序将元素放置到重新形成的数组中。 函数返回值:如果可能的话,这将是一个新的视图对象; 否则,它会成为副本。
注意:将图像转一维数组,转换维度要保证其size不变,newshape==》[行,列]一行n列,要保证其容量大小不变
OpenCV---图像二值化的更多相关文章
- opencv图像二值化的函数cvThreshold()。 cvAdaptiveThreshol
OpenCV中对图像进行二值化的关键函数——cvThreshold(). 函数功能:采用Canny方法对图像进行边缘检测 函数原型: void cvThreshold( const CvArr* sr ...
- Python+OpenCV图像处理(十)—— 图像二值化
简介:图像二值化就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程. 一.普通图像二值化 代码如下: import cv2 as cv import numpy ...
- [python-opencv]图像二值化【图像阈值】
图像二值化[图像阈值]简介: 如果灰度图像的像素值大于阈值,则为其分配一个值(可以是白色255),否则为其分配另一个值(可以是黑色0) 图像二值化就是将灰度图像上的像素值设置为0或255,也就是将整个 ...
- OpenCV_基于局部自适应阈值的图像二值化
在图像处理应用中二值化操作是一个很常用的处理方式,例如零器件图片的处理.文本图片和验证码图片中字符的提取.车牌识别中的字符分割,以及视频图像中的运动目标检测中的前景分割,等等. 较为常用的图像二值化方 ...
- C# 指针操作图像 二值化处理
/// <summary> /// 二值化图像 /// </summary> /// <param name="bmp"></param& ...
- openCV_java 图像二值化
较为常用的图像二值化方法有:1)全局固定阈值:2)局部自适应阈值:3)OTSU等. 局部自适应阈值则是根据像素的邻域块的像素值分布来确定该像素位置上的二值化阈值.这样做的好处在于每个像素位置处的二值化 ...
- MATLAB:图像二值化、互补图(反运算)(im2bw,imcomplement函数)
图像二值化.反运算过程涉及到im2bw,imcomplement函数,反运算可以这么理解:原本黑的区域变为白的区域,白的区域变为黑的区域. 实现过程如下: close all; %关闭当前所有图形窗口 ...
- Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化 [函数名称] P分位法图像二值化 [算法说明] 所谓P分位法图像分割,就是在知道图像中目标所占的比率Rat ...
- Win8 Metro(C#)数字图像处理--2.55OSTU法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.55OSTU法图像二值化 [函数名称] Ostu法图像二值化 WriteableBitmap OstuThSegment(Writ ...
- Win8 Metro(C#)数字图像处理--2.56简单统计法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.56简单统计法图像二值化 [函数名称] 简单统计法图像二值化 WriteableBitmap StatisticalThSegment(Wr ...
随机推荐
- Python20-Day01
简述编译型与解释型语言的区别,且分别列出你知道的哪些语言属于编译型,哪些属于解释 编译型语言是一种以编译器来实现的编程语言,优缺点:执行速度快,调试麻烦 编译型语言:Java,Go,C,C++ 解释性 ...
- 智能客服 对话实现--python aiml包
利用了python的aiml包进行应答 什么是AIML? AIML是Richard Wallace开发的. 他开发了一个叫A.L.I.C.E(Artificial Linguistics Intern ...
- 软工实践 - 第三十次作业 Beta答辩总结
福大软工 · 第十二次作业 - Beta答辩总结 组长本次博客作业链接 项目宣传视频链接 本组成员 1 . 队长:白晨曦 031602101 2 . 队员:蔡子阳 031602102 3 . 队员:陈 ...
- 404 Note Found 现场编程
目录 组员职责分工 github 的提交日志截图 程序运行截图 程序运行环境 GUI界面 基础功能实现 运行视频 LCG算法 过滤(降权)算法 算法思路 红黑树 附加功能一 背景 实现 附加功能二(迭 ...
- 从入门到不放弃——OO第一次作业总结
写在最前面: 我是一个这学期之前从未接触过java的小白,对面向对象的理解可能也只是停留在大一python讲过几节课的面向对象.幸运的是,可能由于前三次作业难度还是较低,并未给我造成太大的困难,接下来 ...
- static关键字的新用法
static关键字的新用法和总结: static这个关键字,也可以像“self”一样,代表“当前类”,用于访问一个类的“静态属性或静态方法”: 但, static,在应用中,更灵活,因此更常见! 因为 ...
- Mybatis 点点滴滴
相比 Hibernate ,Mybatis 实在是学习门槛低多了. 1 . 类属性和表字段的自动对应 当向数据库中插入一行数据时,<insert>标签中的占位符#{}中的占位符的值写 mo ...
- bzoj2788-Festival
题意 有 \(n\) 个变量,有两种限制,分别有 \(m_1,m_2\) 种.限制如下: \(a_x+1=a_y\) \(a_x\le a_y\) 求 \(\{x_i\}\) 集合的大小.\(n\le ...
- Linux进入单用户模式(passwd root修改密码)
进入单用户模式——passwd root修改密码 1.在grub 页面输入a,进入修改内核模式 2.在内核的结尾“/”,输入空格,在输入single,回车 3.启动系统,进入单用户模式 4.Passw ...
- 【Java】CSVUtils
package com.msk.ds.logic; import java.io.*; import java.util.List; /** * Created by Administrator on ...