ROS串口通信
身处机器人行业,不想一直只做低端的单片机控制,老是待在舒适区,所以一直都想学一下ROS系统,但看了几个月资料后,感觉还是云里雾里,似懂非懂,感念似乎都很清楚,但要实际去做,却又感觉无从下手。
于是想先找点眼前马上能用的着东西来实验一下,串口无疑是最合适的,来个ROS串口通信,就简单的跟单片机通通信也是不错的,反正其他难的也还做不了;
当然之前看的资料也没白看,系统安装、基本概念、基本操作都得心里有底,因为Linux基础并不是很好,所以还是比较畏惧敲命令的方式的,不管在Linux系统上做什么,我都还是很乐意去找相应IDE,ROS也不例外,官网上教程全是命令行,痛苦了一阵子之后,实在觉得没必要回到原始人状态,写代码就不用说了,光是那一堆依赖都能让人崩溃,于是网上一顿搜,发现ROS开发也是有IDE的,那个欣喜之情啊,简直溢于言表;马上下载安装上了,用了一段时间,发现这工具有很多bug,有时候莫名其妙的错误,但无妨,至少不用再自己去手动添加依赖了,我心足以!
下面详细介绍如何利用RoboWare-Studio创建一个可以跟串口通信的小例子;
1、创建工作空间,打开Studio创建一个工作区就行了,工作区中的src文件夹会自动创建,编译一下;
2、在src文件夹上右键选择添加C++节点,输入节点名和相应的依赖即可;依赖后面可以随时改;
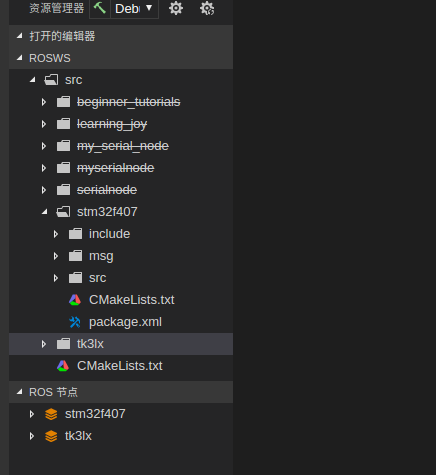
3、创建节点后,里面的src文件夹自动创建,下一步就可以创建C++文件了,如下部分,是串口操作:
其中操作非常简单,定义了一个订阅句柄,用来接收其他节点发布的数据,然后在回调当中,用串口直接发送出去,另外定义一个发布句柄,在主循环不断扫描串口,读取数据,
如果有读到数据,则发布出去,其他节点订阅后既可查看单片机上发的数据;
其中无论订阅还是发布都使用到了一个自定义消息,用来规定要传输数据的格式,添加Msg文件夹后,再添加msg文件,内容如下:
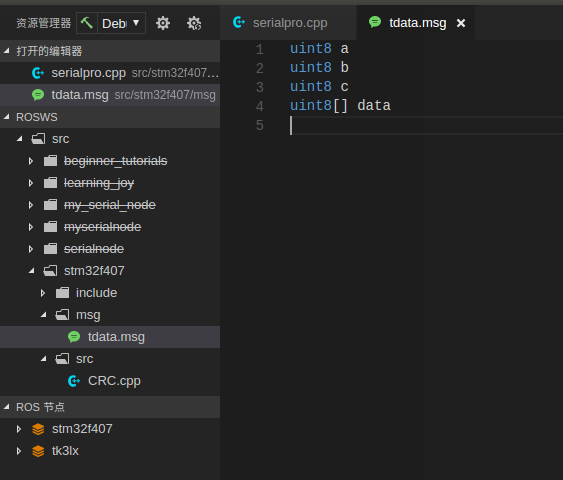
这便是两个话题对应消息格式;
上面这个节点主要用作直接对硬件串口进行收发,它只管收发,并不理会收发的数据是什么,具体流程为,如果接收其他节点发布的消息,则将之原样发送到串口,如何
扫描到串口有数据,则将读到的数据发布到话题上;
所以如果我们要发特定数据并对接收到的做数据处理,则需添加另外一个节点,名称定为datapro,内容如下:
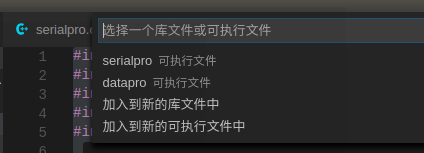
之前一直没搞懂他们的区别,都是选的“加入到新的可执行文件中”,如何选这一项,则改类的代码会单独形成一个可执行文件,在运行时需要单独开启,所以如果两个
功能相对独立,则可以选一项,但是如果代码是调用关系,比如上面的CRC类实际上是被datapro调用的,所以这里我们选择第二项会更好,运行时我们只需要驱动datapro就
可以使用CRC类功能;
另外Studio工具有一个bug是,添加C++类时,会报错,提示找不到头文件,这问题折腾了很久,后来发现需要把自动生成的头文件,提到上一级目标才可编译通过,即将
头文件直接到include文件夹下。
另一个小提醒就是,每次添加新文件或新类时,最好点一下刷新按钮,有时候看不到添加的类文件,需要手动刷新一下才会出来;
ROS串口通信的更多相关文章
- .NET 串口通信
这段时间做了一个和硬件设备通信的小项目,涉及到扫描头.输送线.称重机.贴标机等硬件.和各设备之间通信使用的是串口或网络(Socket)的方式.扫描头和贴标机使用的网络通信,输送线和称重机使用的是串口通 ...
- BluetoothChat用于蓝牙串口通信的修改方法
本人最近在研究嵌入式的串口通信,任务是要写一个手机端的遥控器用来遥控双轮平衡小车.界面只用了一个小时就写好了,重要的问题是如何与板子所带的SPP-CA蓝牙模块进行通信. SPP-CA模块自带代码,在这 ...
- Win10 IoT C#开发 4 - UART 串口通信
Windows 10 IoT Core 是微软针对物联网市场的一个重要产品,既可以开发设备UI与用户交互式操作,又可以控制GPIO等接口,使得原来嵌入式繁琐的开发变得简单.通过Remote Debug ...
- 使用Java实现简单串口通信
最近一门课要求编写一个上位机串口通信工具,我基于Java编写了一个带有图形界面的简单串口通信工具,下面详述一下过程,供大家参考 ^_^ 一: 首先,你需要下载一个额外的支持Java串口通信操作的jar ...
- Java 串口通信
在Windows系统下,用Java开发串口通信相关的程序时,需要用到几个文件. (1)win32com.dll 要放在jdk\jre\bin目录下. (2)comm.jar 和javax.comm.p ...
- .NET 串口通信中断接收,包含0X1A(作为EOF)
.NET串口通信中将`0X1A`当做EOF处理,.NET接收到EOF会触发一次接收中断,此时事件形参`SerialDataReceivedEventArgs`值为枚举 `Eof`,其他为`Chars` ...
- STC12C5A60S2 双串口通信
STC12C5A60S2单片机是一款功能比较强大的单片机,它拥有两个全双工串行通信接口,串口1的功能及操作与传统51单片机串行口相同:特殊的是STC12C5A60S2单片机内部有一个独立波特率发生器, ...
- mfc 调用Windows的API函数实现同步异步串口通信(源码)
在工业控制中,工控机(一般都基于Windows平台)经常需要与智能仪表通过串口进行通信.串口通信方便易行,应用广泛. 一般情况下,工控机和各智能仪表通过RS485总线进行通信.RS485的通信方式是半 ...
- VS2008基于对话框的MFC上位机串口通信(C++实现)简单例程
首先,在 vs2008 环境下创建 MFC 运用程序 设置项目名称为 ComTest(这个地方随意命名,根据个人习惯),点击确定后,点击下一步 出现如下界面 选择"基于对话框"模式 ...
随机推荐
- ES--08
71.内核原理探秘_最后优化写入流程实现海量磁盘文件合并(segment merge,optimize) 课程大纲 每秒一个segment file,文件过多,而且每次search都要搜索所有的seg ...
- iOS -- Effective Objective-C 阅读笔记 (5)
1: 理解 '对象等同性' 概念 理解: 根据'等同性' 来比较对象是一个非常有用的功能, 不过按照 == 操作符比较出来的结果未必是我们想要的, 因为该操作比较的是两个指针本身, 而不是其所指的对象 ...
- vue组件,通过props父组件给子组件传值,WTF, 子组件报错undefined???
如果是正常操作,找了半天又找不到为什么undefined, 那很可能是props的命名出了问题: 不要用小驼峰式命名 例如这种childrenData 这种形式就会报错undefined 请尽量用全 ...
- 记账本-NABCD分析
N(Need)需求 这个软件主要解决了大学生管理自己财务状况的问题,随着手机支付的日趋流行大家对财务的概念就变成了银行卡账户余额的一串数字,在不知不觉中,这串数字就一变小,也就出现了月光族.由此看来, ...
- swiper2 swiper-slide 之间的间距调整
1.在css中调整间距(我的这个是一行显示三个) swiper-slide-active 可以对这个类进行操作 这个类是显示在页面上的第一个元素 2.设置js //热门新闻 swiper var ne ...
- Peer-to-Peer (P2P) communication across middleboxes
Internet Draft B. FordDocument: draft-ford-midcom- ...
- 分享腾讯云的Linux服务器连接速度很慢的解决心得(原创)
最近发觉连接服务器非常慢,之前没有出现过这种情况. 我在这个腾讯云的服务器上弄了很多虚拟服务器,估计是数据量太大 造成了冗余数据较多的原因,咨询了下腾讯云的小哥, 给我了个明确的回复: 您反馈Xshe ...
- js单元测试
最近研究了js的单元测试,分享一下心得. 说起单元测试以前还真是不太了解,这次索性了解一番,测试有很多包含单元测试,性能测试,安全测试和功能测试等几方面,本次只介绍一下单元测试. 前端进行单元测试主要 ...
- BeautifulSoup学习 之结构
Beautiful Soup将复杂HTML文档转换成一个复杂的树形结构,每个节点都是Python对象,所有对象可以归纳为4种: Tag NavigableString BeautifulSoup Co ...
- Fliptile [POJ3279] [开关问题]
题意 给定一张n*m的方格图,有1,0两种数字,每次可以选取一个十字进行翻转,1变成0,0变成1,问最少需要翻转几次,使它全部变成0,全部如果有重复的,按字典序最小的进行输出: 输入 第一行n,m 下 ...