ubuntu16.04 ROS安转及RVIZ启动
1、软件中心配置
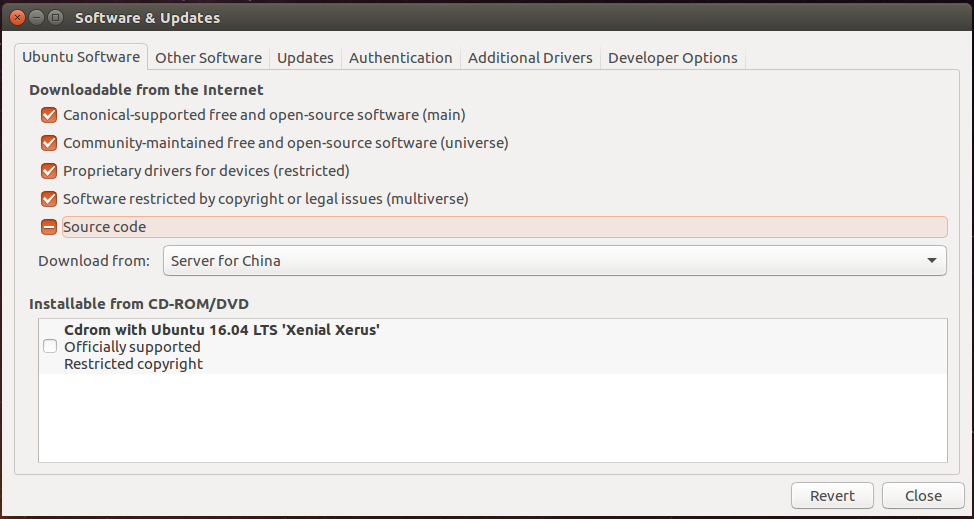
首先打开软件和更新对话框,打开后按照下图进行配置(确保你的"restricted", "universe," 和 "multiverse."前是打上勾的):
2、添加源
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置秘钥:
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
3、安装ROS
首先确保系统软件处于最新版
$ sudo apt-get update
然后我们就可以安装 ROS 啦,但是问题又出现了,ROS kinetic 也有很多版本,比如工业版,基础版,高级版,豪华版,至尊豪华...
既然我们想要学习ROS,那就安装至尊豪华全功能版吧,指令如下:
$ sudo apt-get install ros-kinetic-desktop-full
安装完成后,可以用下面的命令来查看可使用的包:
$ apt-cache search ros-kinetic
到现在,虽然是安装完了,但是还不能用ROS , 需要做一下设置:
(1)需要先初始化 rosdep
$ sudo rosdep init
$ rosdep update
(2)然后初始化环境变量:
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
上面两句非常重要,有的找不到 Package, 找不到node, 很多情况下都是没有添加source
(3)最后安装一个非常常用的插件:
$ sudo apt-get install python-rosinstall
4、测试ROS
启动ROS环境
$ roscore
看看是否显示 started core service [/rosout] 如果没问题,证明安装成功了。
5、启动RVIZ 步骤:
(1)启动 roscore
$ roscore
(2)另外打开一个控制台 输入以下命令:
$ rosrun rviz rviz
6、参考引用文档:
https://www.cnblogs.com/liu-fa/p/5779206.html
http://www.cnblogs.com/liu-fa/p/5761448.html
ubuntu16.04 ROS安转及RVIZ启动的更多相关文章
- Ubuntu16.04 + ROS下串口通讯
本文参考https://blog.csdn.net/weifengdq/article/details/84374690 由于工程需要,需要Ubuntu16.04 + ROS与STM32通讯,主要有两 ...
- ubuntu16.04 ROS环境下配置和运行SVO
ubuntu16.04 ROS环境下配置和运行SVO https://blog.csdn.net/nnUyi/article/details/78005552
- Ubuntu16.04 安装 Visual Studio Code之后启动不起来
$ cd ~/.config $ sudo rm -rf ./Code/ 参考博客:Ubuntu16.04 安装 Visual Studio Code之后启动不起来
- ubuntu16.04 程序开机自启动设置及启动优化
使用过程中,为了方便使用,有一些程序需要开机时自启动应用,下面将介绍一下ubuntu16.04下程序的开机自启动设置方法. 1 建立一个可执行程序的运行脚本如 keepalive.sh.内部写入要执 ...
- ubuntu16.04下部署tomcat9和java8启动一次需要七八分钟
一.环境如下 Ubuntu16.04 +tomcat9+openjdk1.8 二.问题 在tomcat的bin下执行./startup.sh 如下图没有问题 root@bogon:/usr/apac ...
- ubuntu16.04+ROS安装kinectV1
1.安装驱动 安装ROS软件包以下2种方式,任选一种即可,当然全部安装也没有问题 1)使用openni_launch sudo apt-get install ros-kinetic-openni-c ...
- Ubuntu16.04+Ros+Usb_Cam ORB SLAM2
转载自:https://www.jianshu.com/p/dbf39b9e4617亲测可用 1.其中编译ORB_SLAM2的 ./build.sh 和 ./build_ros.sh之前需要修改文 ...
- Ubuntu16.04的图形化界面无法启动问题
昨晚在 Ubuntu 下试图安装笔记本触控板的驱动的时候,突然 Ubuntu 的图形化界面不见了,尝试了 Ctrl + Alt + F1.F2.F3...无果,又在一些博客的指导下尝试在命令行使用 s ...
- Ubuntu16.04桌面系统如何配置和启动wireshark
上一篇介绍了在Ubuntu系统中安装wireshark 本篇介绍在Ubuntu系统中配置和启动wireshark: 安装好后,直接在终端运行$ wireshark.出于安全方面的考虑,普通用户不能够打 ...
随机推荐
- 2.SOAP 语法
SOAP 消息的基本结构 <?xml version="1.0"?> <soap:Envelope xmlns="http://www.w3.org/2 ...
- NGUI版虚拟摇杆
以下是我用nui实现的一个虚拟摇杆. 1,示图 2.代码例如以下,都有比較具体的凝视.就不说明了. using UnityEngine; using System.Collections; using ...
- C 标准库 - <stdlib.h>
C 标准库 - <stdlib.h> 简介 stdlib .h 头文件定义了四个变量类型.一些宏和各种通用工具函数. 库变量 下面是头文件 stdlib.h 中定义的变量类型: 序号 变量 ...
- 深度探究apk安装过程
一.先验知识 0.PcakageaManagerService版本号变化 1.概述 2.PackageManagerService服务启动流程 3. PackageManagerService入口 二 ...
- CloudStack管理VMware遇到的问题
话说前段安装了CloudStack并使用它来管理XenServer,这回要用它来管理VMware.虽说之前遇到了大大小小的问题都攻克了,但在VMware这一块还是遇到了一些麻烦. 在创建资源域.加入集 ...
- 在eclipse中查找指定文件 [多种方法]
在eclipse中查找指定文件 1.ctrl+h打开搜索界面 File Search: containing text填*,File name patterns填写hello.*,可以找到hell ...
- hdu4455 dp
pid=4455">http://acm.hdu.edu.cn/showproblem.php?pid=4455 Substrings Time Limit: 10000/5000 M ...
- mysql-介绍、MySQL部署、数据类型、存储引擎
数据库介绍 什么是数据? 数据(data)是事实或观察的结果,是对客观事物的逻辑归纳,是用于表示客观事物的未经加工的原始素材.数据是信息的表现形式和载体,可以是符号.文字.数字.语音.图像.视频等. ...
- 使用kubernetes 官网工具kubeadm部署kubernetes(使用阿里云镜像)
系列目录 kubernetes简介 Kubernetes节点架构图: kubernetes组件架构图: 准备基础环境 我们将使用kubeadm部署3个节点的 Kubernetes Cluster,整体 ...
- Tomcat多实例 - 单机
最近在研究Apache+Tomcat+负载均衡/集群的过程中,发现了一篇好的在单机上部署多个tomcat实例的blog. 感受:关于Apache+Tomcat+负载均衡/集群,国内关于这方面的资料是挺 ...