(五)目标检测算法之Faster R-CNN
系列博客链接:
(一)目标检测概述 https://www.cnblogs.com/kongweisi/p/10894415.html
(二)目标检测算法之R-CNN https://www.cnblogs.com/kongweisi/p/10895055.html
(三)目标检测算法之SPPNet https://www.cnblogs.com/kongweisi/p/10899771.html
(四)目标检测算法之Fast R-CNN https://www.cnblogs.com/kongweisi/p/10900021.html
写在最前面:https://zhuanlan.zhihu.com/p/31426458,这是某知乎大佬关于我今天所写的超级棒的文章,放在最前面,完全可以不看我的文章去看这位大佬的。
当然,大佬的文章深度和精度都很足,因此文章篇幅比较长,想简单一些了解(其实我的也不是特别简单,很想简单点。。囧~~)Faster R-CNN的,可以直接读我的文章。
本文概述:
1、Faster R-CNN:区域生成网络+Fast R-CNN
候选区域生成(Region Proposal Network),特征提取,分类,位置精修
2、RPN原理
2.1 anchors
2.2 候选区域的训练
3、Faster R-CNN的训练
4、效果对比
5、Faster R-CNN总结
引言:
在Fast R-CNN还存在着瓶颈问题:Selective Search(选择性搜索)。要找出所有的候选框,这个也非常耗时。那我们有没有一个更加高效的方法来求出这些候选框呢?
1、Faster R-CNN
在Faster R-CNN中加入一个提取边缘的神经网络,也就说找候选框的工作也交给神经网络来做了。这样,目标检测的四个基本步骤(候选区域生成,特征提取,分类,位置精修)终于被统一到一个深度网络框架之内。
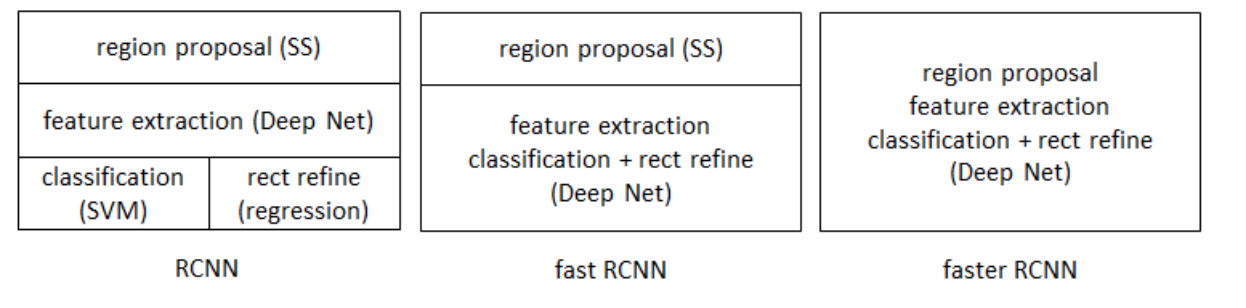
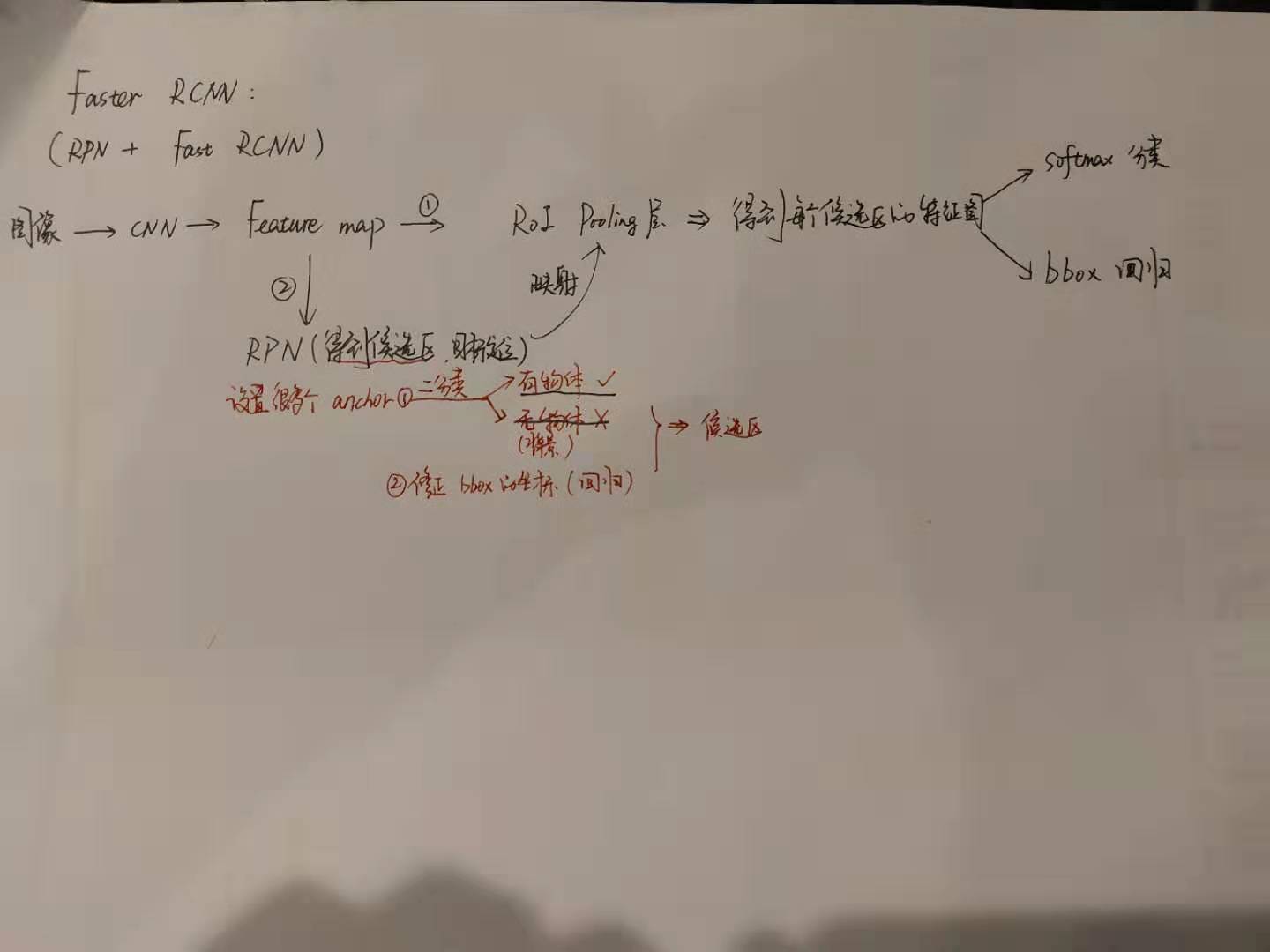
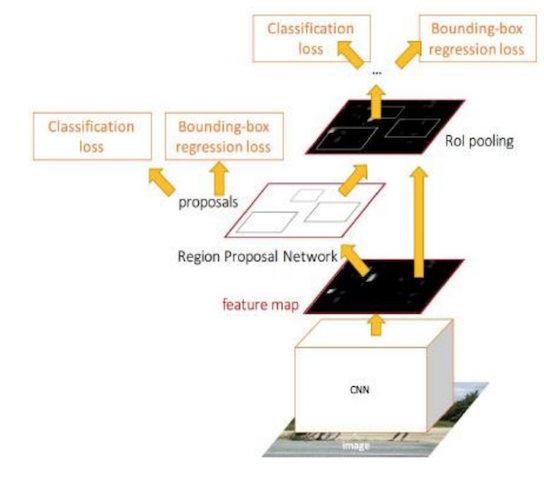
Faster R-CNN可以简单地看成是区域生成网络+Fast R-CNN的模型,用区域生成网络(Region Proposal Network,简称RPN)来代替Fast R-CNN中的选择性搜索方法,结构如下:
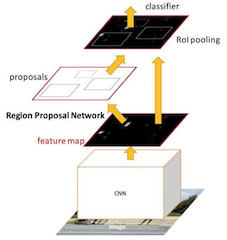
图1 Faster RCNN基本结构
- 1、首先向CNN网络(VGG-16)输入任意大小图片
- 2、Faster RCNN使用一组基础的conv+relu+pooling层提取feature map。该feature map被共享用于后续RPN层和RoI Pooling层。
- 3、Region Proposal Networks。RPN网络用于生成region proposals,该层通过softmax判断anchors属于foreground或者background,再利用bounding box regression修正anchors获得精确的region proposals,输出其Top-N(默认为300)的区域给RoI pooling。
- 生成anchors -> softmax分类器提取fg anchors -> bbox reg回归fg anchors -> Proposal Layer生成region proposals
- 4、第2步得到的高维特征图和第3步输出的区域,合并(可以理解成候选区映射到特征图中,类似第(三)节SPPNet中1.1"映射")输入RoI池化层(类), 该输出到全连接层判定目标类别。
- 5、利用proposal feature maps计算每个region proposal的不同类别概率,同时bounding box regression获得检测框最终的精确位置

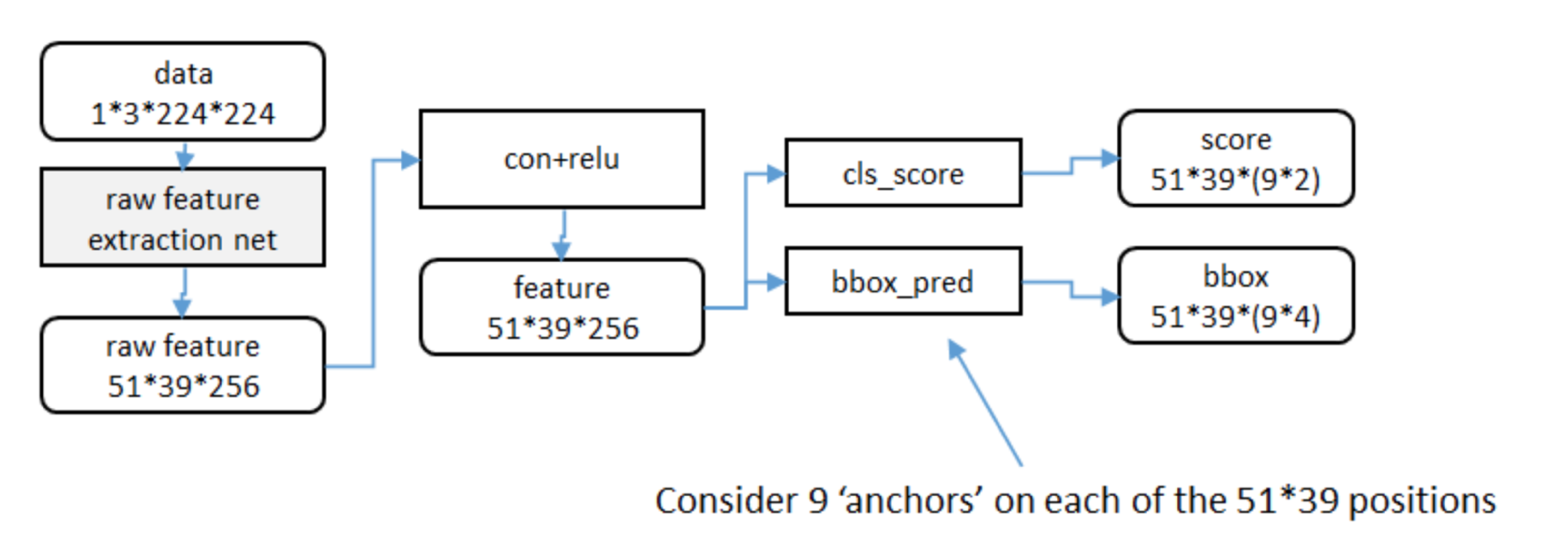
图2 Faster RCNN基本结构
解释:
图2展示了python版本中的VGG16模型中的faster_rcnn_test.pt的网络结构,可以清晰的看到该网络对于一副任意大小PxQ的图像,首先缩放至固定大小MxN,然后将MxN图像送入网络;
而Conv layers中包含了13个conv层+13个relu层+4个pooling层;RPN网络首先经过3x3卷积,再分别生成foreground anchors与bounding box regression偏移量,然后计算出region proposals;
而Roi Pooling层则利用region proposals从feature maps中提取region proposal feature送入后续全连接和softmax网络作classification(即分类region proposal到底是什么object)。
2、 RPN(Region Proposal Networks)原理
RPN网络的主要作用是得出比较准确的候选区域。整个过程分为两步
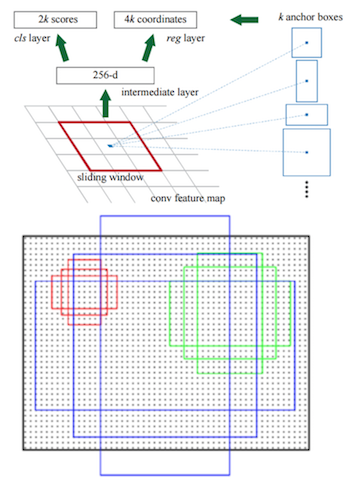
- 用n×n(默认3×3=9)的大小窗口去扫描特征图,每个滑窗位置映射到一个低维的向量(默认256维),并为每个滑窗位置考虑k种(在论文设计中k=9)可能的参考窗口(论文中称为anchors,锚框)
- 低维特征向量输入两个并行连接的1 x 1卷积层然后得出两个部分:reg窗口回归层(用于修正位置)和cls窗口分类层(是否为前景或背景概率)
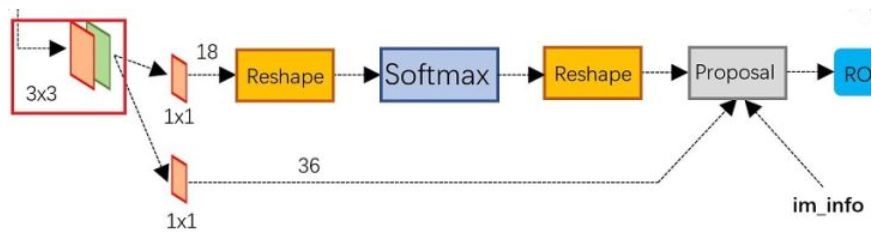
图3 RPN层基本结构
上图3展示了RPN网络的具体结构。可以看到RPN网络实际分为2条线,上面一条通过softmax分类anchors获得foreground和background(检测目标是foreground),
下面一条用于计算对于anchors的bounding box regression偏移量,以获得精确的proposal。而最后的Proposal层则负责综合foreground anchors和bounding box regression偏移量获取proposals,
同时剔除太小和超出边界的proposals(有一些分类实在太烂的区域,我们直接丢掉,否则计算量会非常大)。其实整个网络到了Proposal Layer这里,就完成了相当于目标定位(相当于完成了选择性搜索(SS)生成候选区)的功能。
2.1 anchors
举个例子:
- 3*3卷积核的中心点对应原图上的位置,将该点作为anchor的中心点,在原图中框出多尺度、多种长宽比的anchors, 三种尺度{ 128,256,512 }, 三种长宽比{1:1,1:2,2:1}
解释:
所谓anchors,实际上就是一组的矩形。
[[ -84. -40. 99. 55.]
[-176. -88. 191. 103.]
[-360. -184. 375. 199.]
[ -56. -56. 71. 71.]
[-120. -120. 135. 135.]
[-248. -248. 263. 263.]
[ -36. -80. 51. 95.]
[ -80. -168. 95. 183.]
[-168. -344. 183. 359.]]
其中每行的4个值 表矩形左上和右下角点坐标。9个矩形共有3种形状,长宽比为大约为
三种,如图4。实际上通过anchors就引入了检测中常用到的多尺度方法。
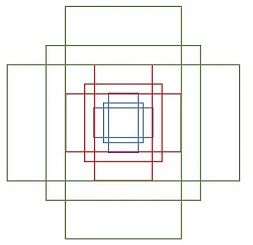
图4 anchors示意图
注:关于上面的anchors size,其实是根据检测图像设置的。在python demo中,会把任意大小的输入图像reshape成800x600(即图2中的M=800,N=600)。再回头来看anchors的大小,anchors中长宽1:2中最大为352x704,长宽2:1中最大736x384,基本是cover了800x600的各个尺度和形状。
那么这9个anchors是做什么的呢?借用Faster RCNN论文中的原图,如图5,遍历Conv layers计算获得的feature maps,为每一个点(每一个像素的中心)都配备这9种anchors作为初始的检测框。这样做获得检测框很不准确,不用担心,后面还有2次bounding box regression可以修正检测框位置。
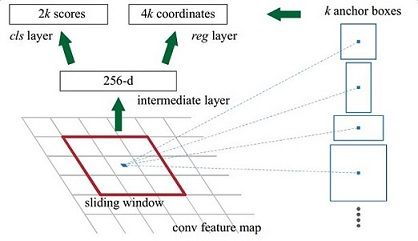
图5
其实RPN最终就是在原图尺度上,设置了密密麻麻的候选Anchor。然后用cnn去判断哪些Anchor是里面有目标的foreground anchor,哪些是没目标的backgroud。所以,仅仅是个二分类而已!
而anchor的个数也是我们关心的一个问题,如下图经过CNN后得到的特征是51 x 39(通道数忽略),那么对于9种形状的anchor,一共有51 x 39 x 9 = 17901个anchor从RPN层输出,对于更高维度的图像,输出的特征会更大,带来训练参数过大的问题。
2.2 候选区域的训练
- 训练样本anchor标记
- 1.每个ground-truth box有着最高的IoU的anchor标记为正样本
- 2.剩下的anchor/anchors与任何ground-truth box的IoU大于0.7记为正样本,IoU小于0.3,记为负样本
- 3.剩下的样本全部忽略
- 正负样本比例为1:3
- 训练损失
- RPN classification (anchor good / bad) ,二分类,是否有物体,是、否
- RPN regression (anchor -> proposal) ,回归
- 注:这里使用的损失函数和Fast R-CNN内的损失函数原理类似,同时最小化两种代价
候选区域的训练是为了让得出来的正确的候选区域, 并且候选区域经过了回归微调。
在这基础之上做Fast RCNN训练是得到特征向量做分类预测和回归预测。
3、Faster R-CNN的训练
Faster R-CNN的训练分为两部分,即两个网络的训练。前面已经说明了RPN的训练损失,这里输出结果部分的的损失(这两个网络的损失合并一起训练):
Fast R-CNN classification (over classes) ,所有类别分类N+1
Fast R-CNN regression (bbox regression)
4、效果对比

5、Faster R-CNN总结
- 优点
- 提出RPN网络
- 端到端网络模型
- 缺点
- 训练参数过大
- 对于真实训练使用来说还是依然过于耗时
可以改进的需求:
- RPN(Region Proposal Networks) 改进 对于小目标选择利用多尺度特征信息进行RPN
- 速度提升 如YOLO系列算法,删去了RPN,直接对Region Proposal(候选区)进行分类回归,极大的提升了网络的速度
(五)目标检测算法之Faster R-CNN的更多相关文章
- 第三十一节,目标检测算法之 Faster R-CNN算法详解
Ren, Shaoqing, et al. “Faster R-CNN: Towards real-time object detection with region proposal network ...
- 目标检测算法之Faster R-CNN算法详解
Fast R-CNN存在的问题:选择性搜索,非常耗时. 解决:加入一个提取边缘的神经网络,将候选框的选取交给神经网络. 在Fast R-CNN中引入Region Proposal Network(RP ...
- (六)目标检测算法之YOLO
系列文章链接: (一)目标检测概述 https://www.cnblogs.com/kongweisi/p/10894415.html (二)目标检测算法之R-CNN https://www.cnbl ...
- (七)目标检测算法之SSD
系列博客链接: (一)目标检测概述 https://www.cnblogs.com/kongweisi/p/10894415.html (二)目标检测算法之R-CNN https://www.cnbl ...
- 深度学习笔记之目标检测算法系列(包括RCNN、Fast RCNN、Faster RCNN和SSD)
不多说,直接上干货! 本文一系列目标检测算法:RCNN, Fast RCNN, Faster RCNN代表当下目标检测的前沿水平,在github都给出了基于Caffe的源码. • RCNN RCN ...
- 基于候选区域的深度学习目标检测算法R-CNN,Fast R-CNN,Faster R-CNN
参考文献 [1]Rich feature hierarchies for accurate object detection and semantic segmentation [2]Fast R-C ...
- 目标检测算法的总结(R-CNN、Fast R-CNN、Faster R-CNN、YOLO、SSD、FNP、ALEXnet、RetianNet、VGG Net-16)
目标检测解决的是计算机视觉任务的基本问题:即What objects are where?图像中有什么目标,在哪里?这意味着,我们不仅要用算法判断图片中是不是要检测的目标, 还要在图片中标记出它的位置 ...
- Domain Adaptive Faster R-CNN:经典域自适应目标检测算法,解决现实中痛点,代码开源 | CVPR2018
论文从理论的角度出发,对目标检测的域自适应问题进行了深入的研究,基于H-divergence的对抗训练提出了DA Faster R-CNN,从图片级和实例级两种角度进行域对齐,并且加入一致性正则化来学 ...
- 第二十九节,目标检测算法之R-CNN算法详解
Girshick, Ross, et al. “Rich feature hierarchies for accurate object detection and semantic segmenta ...
随机推荐
- K8s QoS Pod资源服务质量控制
Kubernetes 中如果一个 Node 节点上的 Pod 占用资源过多并且不断飙升导致 Node 节点资源不足,可能会导致为了保证节点可用,将容器被杀掉.在遇见这种情况时候,我们希望先杀掉那些不太 ...
- APC 篇—— APC 挂入
写在前面 此系列是本人一个字一个字码出来的,包括示例和实验截图.由于系统内核的复杂性,故可能有错误或者不全面的地方,如有错误,欢迎批评指正,本教程将会长期更新. 如有好的建议,欢迎反馈.码字不易, ...
- Linux 配置mysql 免安装版。
二.Linux配置 mysql ? 1.linux配置mysql(要求全部使用免安装版) 5.1.从官网下载mysql5.tar.gz 5.2.使用xftp把mysql的压缩包上传到服务器上 5.3. ...
- javac、java、javap 的使用详解
简介 JDK中常用命令 切换目录 切换目录 进入D:\zs 第一种 第二种 其他常用命令 cls: 实现清屏 cd..: 切换到上一级目录 javac 简介 来编译.java文件的.命令行下直接输入j ...
- 前后端数据json交换的问题
问题1:前端发送给后端数据了,后端也接收到了,后端同时返回数据给前端了,但是前端的ajax请求中的success(data){}中的方法不执行 解决:排查了很多问题,结果都一一排除了,最后发现后端发送 ...
- 乐动ld06激光雷达sdk改bug记录分享
前言: 工作中,有使用过乐动ld06款激光雷达,此款雷达将常规雷达的转动的电机部分内置于自己的保护罩内,减少了雷达本身转动积灰等其他外界影响,探测半径是12m,是一款不错的雷达. 不过今天的主要内容不 ...
- 测试人员学Java入门指南
目标读者 本指南特别适合有Python基础的同学学习Java入门,对于没有任何编程经验的同学可能会存在困难. 为什么测试人员要学Java 选择Java,应该不错.TesterHome测试论坛知名大佬基 ...
- A*算法及其matlab实现
教程 基本理论教程 A*算法程序 最简单的A*算法
- VScode git无法使用,Error: command 'git.push' not found 源代码管理无法使用的问题及解决方法
正常条件下,只要电脑中安装了Git,VScode就可以直接使用. 在开始界面有下图所示的功能: 在源代码管理栏目中: 如果没能正常工作,就看不到这些功能. 可能在用某些与git相关的功能时,如安装了G ...
- 手把手带你基于嵌入式Linux移植samba服务
摘要:Samba是在Linux和UNIX系统上实现SMB协议的一个免费软件,由服务器及客户端程序构成. 本文分享自华为云社区<嵌入式Linux下移植samba服务--<基于北斗和4G ca ...