KL46 custom board SWD reset is never asserted - SWS Waveform
KL46 custom board SWD reset is never asserted
Hi everybody,
I'm trying to program a custom board based on the KL46. However the reset signal for the SWD port is stuck at logic LOW. My programmer is a P&E Multilink FX. I can successfully program my test app on an FRDM-KL46Z. But I get the following error on CW 10.5's console when I try to program my custom KL46 board:
"can not enter background mode"
Then CW 10.5 displays the "P&E Connection Assistant" dialog offering me to "Retry", "Abort" and/or edit the connection settings. If I click "Abort" I get a "Problem Occured" dialog with the following explanation:
"Error launching imatec-firmware_FLASH_PnE U-MultiLink
ARM GDI Protocol Adapter : Can't connect. The Debugger can not connect to the P&E device"
I found a PDF guide by P&E Micro with troubleshooting steps to follow when the background mode cannot be entered:
http://cache.freescale.com/files/microcontrollers/doc/support_info/USBMLUNIVERSALFX.pdf
1) Check for power on. Checked! Power is on.
2) Make sure the processor oscillator is running. Checked! The external oscillator is not running but I believe this is normal since it should be the KL46's responsibility to cause the external crystal oscillator to run. I'm using an 8 MHz crystal.
3) Look up the startup sequence for your microprocessor:
3.a) Reset is driven low (to processor). Checked! **It always stays at low.**
3.b) Activity appears on TCK, TDI and TDO. Cheked! I'm using the SWD interface and I see that SWD_CLK and SWD_DIO give a burst sequence and then the lines go back to logic low and stay like that.
3.c) Reset is released by the interface and will go high. Checked! **Reset always stays low.**
3.d) Activity appears on TCK, TDI and TDO (Debug activity). Checked! The SWD_CLK and SWD_DIO lines stay low indefinitely.
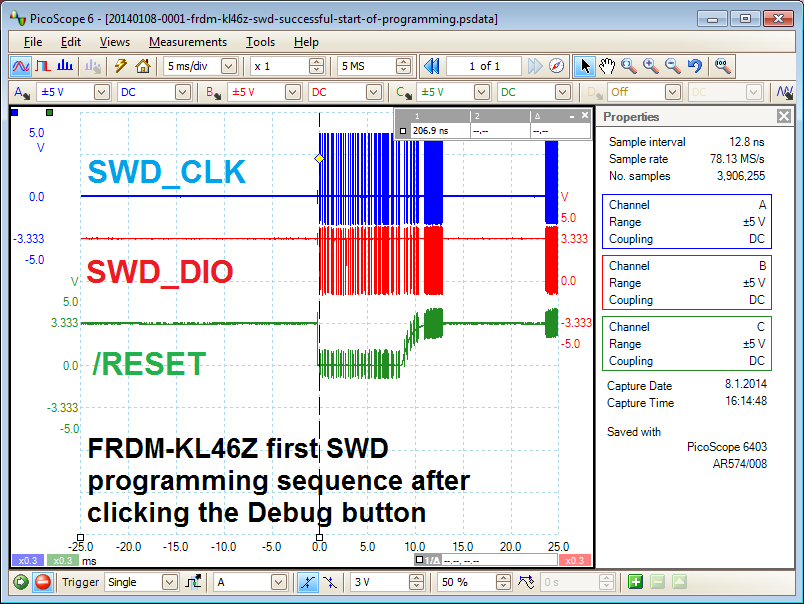
In contrast, the FRDM-KL46Z successfully passes these checks and I have been able to take oscilloscope captures of both the successful FRDM-KL46Z SWD programming attempts and the unsuccessful custom KL46 board SWD programming attempts. The burst sequence produced by the P&E Multilink FX on the SWD lines looks the same for both boards with the following exceptions:
The reset line is never asserted in the custom board and the SWD clock and data lines stay indefinitely low after the initial burst sequence.
In contrast, the burst sequence with the FRDM-KL46Z shows that the reset line is asserted at the beginning of the sequence and then it is released to logic HIGH at the end of the sequence. This is followed by an idle period and then new burst sequences are exchanged between the FRDM-KL46Z and the P&E Multilink FX.
I already checked that the SWD pins from the Multilink unit have continuity all the way the correct KL46 pins. I'm using a 64-pin LQFP package.
The pins are connected as follows:
TVCC to OUT3V3
GND to my custom board's GND plane (For example, I checked that the GND has continuity with the VSS pins on the KL46)
SWD_CLK/TCK to PTA0
SWD_DIO/TMS to PTA3
RESET_n to PTA20
TDI to PTA1
TDO to PTA2
The TDI and TDO lines are connected because that's what's shown in the FRDM-KL46Z's reference schematic. I checked these lines on an oscilloscope and I can tell that neither the FRDM-KL46Z or the custom board show any activity on them.
Thanks in advance, any suggestions are welcome! I will let you know if I find the solution.
What is the correct SWD sequence that I should see when I first click the debug button and what does this sequence mean (command by command)? Maybe this is the question I should actually be asking.
I have oscilloscope captures of a successful programming sequence for the FRDM-KL46Z board. But I don't really understand them. I have read the following documents and tutorials about SWD but I'm still not quite sure of how to apply this knowledge to analyze the SWD transfers I see for the successful programming of the FRDM-KL46Z board and the unsuccessful programming of the custom KL46 board.
Here's the documents I've read:
Serial Wire Debug and the CoreSight Debug and Trace Architecture
www.arm.com/files/pdf/Serial_Wire_Debug.pdf
NXP's Introduction to Cortex Serial Wire Debugging
http://www.lpcware.com/content/blog/introduction-cortex-serial-wire-debugging-part-one
http://www.lpcware.com/content/blog/introduction-cortex-serial-wire-debugging-part-two
http://www.lpcware.com/content/blog/introduction-cortex-serial-wire-debugging-part-three
The SWD commands I see at the beginning of the successful FRDM-KL46Z programming sequence don't seem to match the 46 cycle format mentioned in ARM's SWD document. Neither do they match the SWD unlock sequence described in NXP's SWD documentation. NXP states that these are the following steps to unlock SWD:
1) The Host needs to switch the target from JTAG to SWD mode by clocking 0xE79E onto SWDCLK/SWDIO
2) SWD connection sequence- clock out more than 50 binary 1s
3) Must read the Debug Port IDCODE register (address 0)
4) Turn on Debug Port by settings bits 28 and 30 at DP address 4
5) Write AP select (debug port address 8) to 0xF0 (to prep for AP read of 0xFC)
6) Unlock Access Port by reading AP ID register (AP address 0xFC)
If the FRDM-KL46Z's successful SWD programming sequence does not match the SWD documentation then how is it possible for the Multilink programmer to successfully program the board? Is it the case that Freescale and P&E Micro have implemented a custom or proprietary initialization sequence?
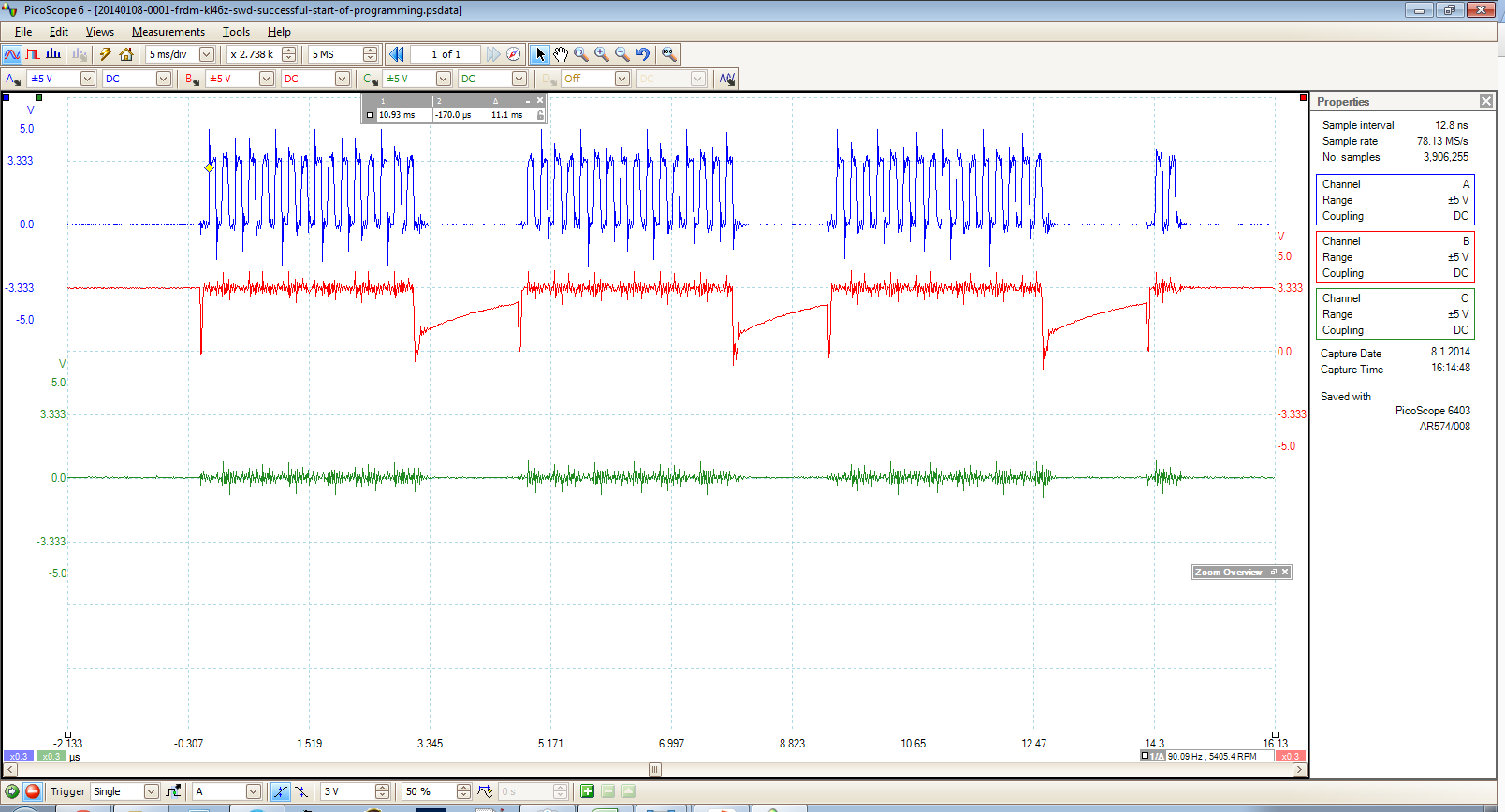
Here's the first burst sequence I see when I try to program the FRDM-K46Z board:
Zooming in into the first burst:

Zooming in even more on the section right after the reset is asserted:
Thanks in advance. I will keep posting any hints and discoveries in the meantime.
I'm using PE multilink universal(not FX) .
My custom KL24 board couldn't launch from multilink.
I added chip capacitors from SWDIO to GND and SWCLK to GND. ( 100pF)
I accessed target board from multilnk.
When reset pin doesn't assert , Please try to remove A 1uF capacitor of reset to GND.
So reset signal alternates H and L about 100us.
Hi Kenji,
Thank you for your suggestions!
Adding 100pF bypass capacitors to the SWD CLK and SWD DIO lines somehow allowed the reset line to toggle for one day but the problem is back.
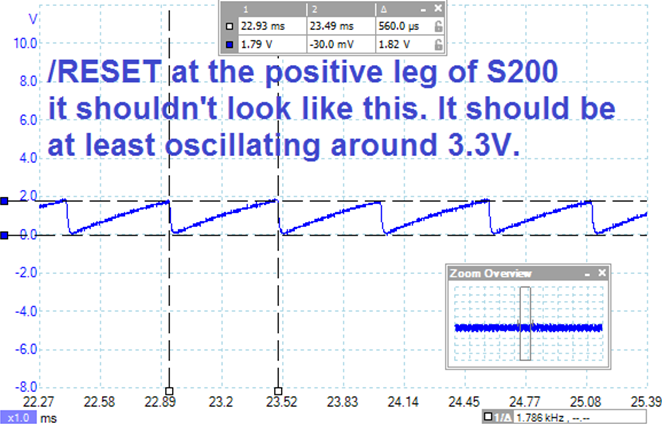
After additional tests I've come to conclude that there's something wrong with the custom board around the reset button. There's something causing the reset pin to "see" a sawtooth waveform at around 1.7 kHz, sometimes higher, sometimes lower. It depends on what I connect to the board or if I try to add larger bypass capacitors to supress this sawtooth "ripple". Also the ripple doesn't oscillate around 3.3 V. It oscillates between 0 V and 2.0 V. That's too large of an oscillation. The reset signal is probably oscillating in and out of the hysteresis zone of the KL46's reset input pin. It's ok to have some small ripple in this line but not with this kind of amplitude. So that tells me that changing my 10 kOhm pull up resistor will not completely solve this problem. In any case, I looked at an FRDM-KL46's reset and power signals and they look very clean. So I know this problem with the custom board can be cleaned up quite a bit.
Today I'm going to look further and more carefully into the custom board with an oscilloscope and a microscope to figure out the source of the problem. I will write back to let you know how the problem was solved.
Hi everybody,
The problem was fixed by fixing some solder points in the adapter board
that I'm using to match the Multilink's ribbon cable to the custom board's miniature flex cable connector.
K10 custom board
Below is a scope of SWDIO (red) and SWDCLK(yellow).
- The first rising clock edge after the first falling data edge is the SWD stop bit
- The line is driven high and then "parked"
- The first clock of the group of 4, should be the turnaround clock
- For the next 3 clocks, my chip should ACK with b100 (little-indian)

At the rising edge for each bit of ACK, there is a small drop in the data line...
Possibly:
1) My chip is trying to pull the line low but can't or doesn't:
- Assume there are no electrical shorts
- Assume there is insufficient filtering and other neglected design issues and/or errata
- If the chip IS responsible for the drop, then it is alive and was not destroyed during soldering
- If the chip IS alive, it seems to be aware of WHEN it should respond, indicating that the internal oscillator is probably running correctly
- What would cause a correctly soldered and otherwise-working chip to exhibit this behavior?
2) My chip is doing nothing:
- I fried every one of them while soldering
- The drop is the result of the debugger sampling the line
- Is this possible/reasonable and likely?
There is no feedback from anything besides the "it didn't work" dialog.
KL46 custom board SWD reset is never asserted - SWS Waveform的更多相关文章
- swddude -- A SWD programmer for ARM Cortex microcontrollers.
Introducing swddude I love the ARM Cortex-M series of microcontrollers. The sheer computational po ...
- Programming internal SRAM over SWD
https://github.com/MarkDing/swd_programing_sram // // Copyright (c) 2013 SILICON LABORATORIES, INC. ...
- SWD Connect/Transfer Source Code
Serial Wire Debug interface The Serial Wire Debug protocol operates with a synchronous serial interf ...
- cmsis dap interface firmware
cmsis dap interface firmware The source code of the mbed HDK (tools + libraries) is available in thi ...
- Ubuntu16.04下的stm32环境配置
安装stlink 必须安装libusb-1.0-0-dev, 其他安装不起作用 -dev git clone https://github.com/texane/stlink.git cd stlin ...
- uboot的readme
## (C) Copyright 2000 - 2008# Wolfgang Denk, DENX Software Engineering, wd@denx.de.## See file CREDI ...
- Linux内核配置选项
http://blog.csdn.net/wdsfup/article/details/52302142 http://www.manew.com/blog-166674-12962.html Gen ...
- 深入linux kernel内核配置选项
============================================================================== 深入linux kernel内核配置选项 ...
- intel 82599网卡(ixgbe系列)术语表
Intel® 82599 10 GbE Controller Datasheet 15.0 Glossary and Acronyms 术语表 缩写 英文解释 中文解释 1 KB A value of ...
随机推荐
- Anaconda+django写出第一个web app(七)
今天来实现如何在页面弹出一些信息,比如注册成功后弹出注册成功的信息.这一点可以通过materialize里的Toasts来实现. django自带的messages可以告诉我们是否注册成功,以及注册失 ...
- linux的lemon安装示范
\(First\): 1. 准备好 lemon原文件 2. 解压压缩包(名字必须是lemon) 第二步:找到readme.md这个文件 第三步:了解一下安装指南 第四步:打开终端 注意:源代码目录就是 ...
- java交互方式中的同步与异步
JAVA中交互方式分为同步和异步两种: 1.同步交互:指发送一个请求,需要等待返回,然后才能够发送下一个请求,有个等待过程; 2.异步交互:指发送一个请求,不需要等待返回,随时可以再发送下一个请求,即 ...
- Net::HTTP 一次添加 cookie, body 发送post请求
use Net::HTTP::Request; use Net::HTTP::URL; use Net::HTTP::Transport; my $url = Net::HTTP::URL.new(& ...
- 记录自己对EventLoop和性能问题处理的一点心得【转】
转自:http://www.cnblogs.com/lanyuliuyun/p/4483384.html 1.EventLoop 这里说的EventLoop不是指某一个具体的库或是框架,而是指一种程序 ...
- Phantomjs 抓取、分析某个页面加载时浏览器发起的所有的子请求
var page = require('webpage').create(), system = require('system'), address; if (system.args.length ...
- Oracle 用脚本安装第二个数据库
安装第二个数据库: 登录oracle用户进入家目录,添加配置环境变量: vi .bash_profier ORACLE_SID=prod2 临时环境变量: $export ORACLE_HOME= ...
- 移动端HTML5开发 选择方案
如今出现了大量的CSS前端框架,但真正优秀的框架只有少数几个. 本文将会比较其中五个最佳的框架.每个框架都有自己的优点和缺点,以及具体的应用领域,你可以根据自己的具体项目需求进行选择.此外,许多选项都 ...
- Linix下修改mysql服务器编码
1. 找到mysql的配置文件,拷贝到etc目录下,第一步很重要 把/usr/share/doc/mysql-server-5.1.52/my-large.cnf 复制到 /etc/my.cnf 即用 ...
- 当Python与数模相遇
数模有一个题目要处理杭州自行车在每个站点可用数量和已经借出数量,这数据在www.hzbus.cn上可以获取,它是10分钟更新一次的.这些数据手动获取,需要不停的刷页面,从6:00am到9:00pm,显 ...