Micropython教程之TPYBoard制作蓝牙+红外循迹小车
1.实验目的
学习在PC机系统中扩展简单I/O接口的方法。
进一步学习编制数据输出程序的设计方法。
学习蓝牙模块的接线方法及其工作原理。
学习L298N电机驱动板模块的接线方法。
学习蓝牙控制小车的工作原理。
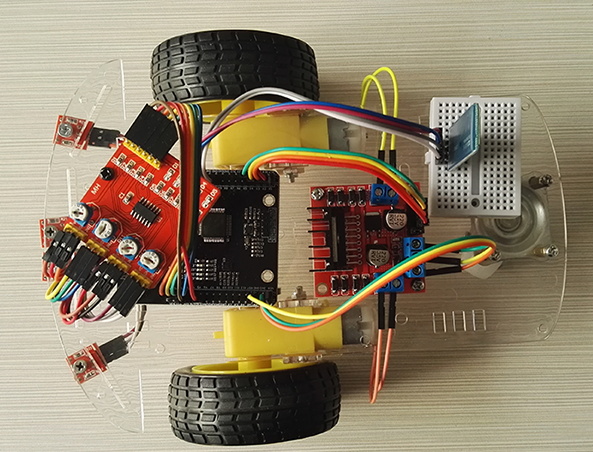
2.所需元器件
TPYBoardv102板子1块
蓝牙串口透传模块(HC-06)1个
L298N电机驱动板模块1个
智能小车底盘1个
数据线1条
杜邦线若干
智能蓝牙小车APP(Android版)点击下载
3.蓝牙串口模块原理
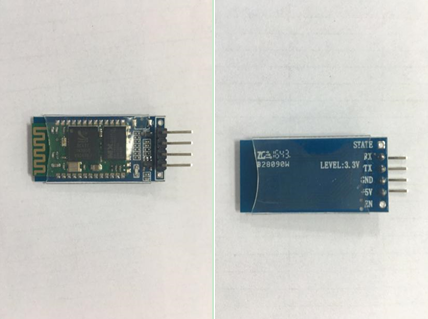
(1)引出接口包括EN,5V,GND,TX,RX,STATE,我们小车只用到RX,TX,GND,5V四个针脚
(2)模块默认波特率位9600,默认配对密码为1234,默认名称位为HC-06
(3)led指示蓝牙连接状态,闪烁表示没有蓝牙连接,常亮表示蓝牙已连接并打开了端口,当我们用安卓手机软件发送指令时,通过串口给TPYBoard发送指令,TPYBoard收到指令通过L298BN模块来驱动小车前进,后退,向左,向右或者停止。
如下表接线:
| 蓝牙模块(HC-06) | TPYBoardv10x |
|---|---|
| 5V | VIN(+5V) |
| GND | GND |
| RX | Y9(UART(3)-TX) |
| TX | Y10(UART(3)-RX) |
4.四路红外循迹模块
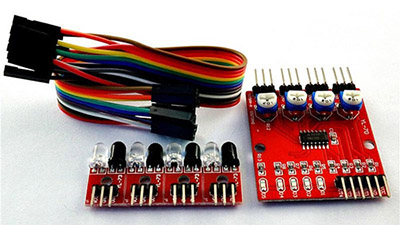
(1)当模块检测到前方障碍物信号时,电路板上红色指示灯点亮,同时OUT端口持续输出低电平信号,该模块检测距离2~60cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
(2)传感器属于红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
(3)传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器模块或者蜂鸣器模块;连接方式:VCC-VCC、GND-GND、OUT-IO。
(4)比较器采用LM339,工作稳定。
(5)可采用3.3V-5V直流电源对模块进行供电。当电源接通时,绿色电源指示灯点亮。
5.四路红外感应探头的安装
寻迹的原理其实就光的吸收,反射和散射。大家都知道,白色反射所有颜色的光,而黑色吸收所有颜色的光,这就为小车寻迹提供了有力的科学依据。在小车的车头上安装上红外探头(我是安装了四个),一字顺序排开。哪个探头接收不到反射或者散射回来的光时,说明这个探头此时正在黑色的寻迹带上。
6.判断反馈的信号
如果要是正前方的探头接收不到光,那么说明小车此时走在黑色的寻迹带上。可以使小车直线行走。如果左面的探头接收不到光,那么说明小车左面出现了黑色寻迹带,此时小车应该执行左转弯。右转弯同左转弯原理。如果要是小车前面,左面,右面三个方向全都接收不到光,或者是两个方向上的探头都接收不到光,到底是左转弯,右转弯还是继续直行,这个就要看你自己在程序里怎么做判断了。
7.探头的安装与接线
四路红外探头接线很简单,虽然有十八根线,但是有十二根是三根三根的分成四组,一一对应接线,其余的六根,是VCC和GND。还有四根是接到TPYBoardv10x开发板的IO口上的,用于接收四路红外循迹模块反馈的信号。
接线OK后,编写main.py,给TPYBoard通电就ok了,下面是源代码。
8.源代码
# main.py -- put your code here!
import pyb
from pyb import UART
from pyb import Pin N1 = Pin('X1', Pin.OUT_PP)
N2 = Pin('X2', Pin.OUT_PP)
N3 = Pin('X3', Pin.OUT_PP)
N4 = Pin('X4', Pin.OUT_PP) M1 = Pin('Y1', Pin.IN)
M2 = Pin('Y2', Pin.IN)
M3 = Pin('Y3', Pin.IN)
M4 = Pin('Y4', Pin.IN) blue=UART(3,9600)
mode='1'#1:表示蓝牙模式 2:循迹模式 def Stop():
N1.low()
N2.low()
N3.low()
N4.low()
def Back():
N1.high()
N2.low()
N3.high()
N4.low()
def Go():
N1.low()
N2.high()
N3.low()
N4.high()
def Left():
N1.high()
N2.low()
N3.low()
N4.high()
def Right():
N1.low()
N2.high()
N3.high()
N4.low()
while True:
if blue.any()>0:
data=blue.read().decode()
print(data)
if data.find('0')>-1:
#stop
Stop()
mode="1"
print('stop')
if data.find('1')>-1:
Go()
print('go')
if data.find('2')>-1:
Back()
pyb.delay(500)
Stop()
if data.find('3')>-1:
Left()
pyb.delay(250)
Stop()
if data.find('4')>-1:
Right()
pyb.delay(250)
Stop()
if data.find('5')>-1:
mode="1"
Stop()
if data.find('6')>-1:
mode="2"
else:
if mode=="2":
print('循迹模式')
if(M1.value() and M2.value() and M3.value()):
Stop()
mode="1"
if(M2.value() or M3.value()):
pyb.LED(2).on()
pyb.LED(3).off()
pyb.LED(4).off()
Go()
if M1.value():
pyb.LED(3).on()
pyb.LED(2).off()
pyb.LED(4).off()
Right()
pyb.delay(10)
if M4.value():
pyb.LED(4).on()
pyb.LED(2).off()
pyb.LED(3).off()
Left()
pyb.delay(10)
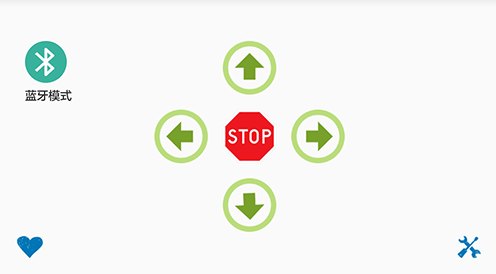
9.智能蓝牙小车APP的使用
下载安装后,打开[蓝牙智能小车]APP,进入操作界面。如下:
点击左下角的桃心图标,进入自定义编码界面。通过这个界面,我们可以自定义操作界面中各个按键发出去的指令内容。如下:

点击页面下方的关于我们,可以加入我们的技术交流群和关注微信公众号。如下:

接下来,回到一开始的操作界面,点击右下角的设置图标,进行蓝牙模块的连接。首先先点击[搜索蓝牙设备],界面会自动加载搜索到的蓝牙设备,当出现HC-06时,点击进行连接。

如果是第一次连接,需要进行配对,配对的密码默认1234。
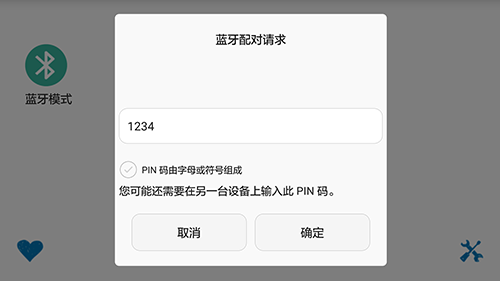
提示连接成功后,我们就可以通过四个方向键来操纵智能蓝牙小车了。
大家可以看到,右上角的图标,可以进行蓝牙模式和循迹模式的切换。当按下时,两种模式来回切换。当处于循迹模式时,界面如下。

Micropython教程之TPYBoard制作蓝牙+红外循迹小车的更多相关文章
- MicroPython教程之TPYBoard开发板DIY红外寻迹小车
智能小车现在差不多是电子竞赛或者DIY中的主流了,寻迹,壁障,遥控什么的,相信大家也都见得很多了,这次就大家探讨一下寻迹小车的制作方法,不同于以往的是这次的程序不用C语言写,而是要使用python语言 ...
- Micropython教程之TPYBoardv102 DIY蓝牙智能小车实例
1.实验目的 1.学习在PC机系统中扩展简单I/O接口的方法. 2.进一步学习编制数据输出程序的设计方法. 3.学习蓝牙模块的接线方法及其工作原理. 4.学习L298N电机驱动板模块的接线方法. 5. ...
- MicroPython教程之TPYBoard开发板DIY小型家庭气象站
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生.跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢? 海拔高度测量 对 ...
- MicroPython教程之TPYBoard v102 CAN总线通信
0x00前言 CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是ISO国际标准化的串行通信协议.CAN总线结构简单,只需2根线与外部相连,并且内部集成了错误探测和管 ...
- Micropython教程之TPYBoard开发板驱动舵机教程(萝卜学科编程教育)
大家应该都看到过机器人的手臂啊腿脚啊什么的一抽一抽的在动弹吧...是不是和机械舞一样的有节奏,现在很多机器人模型里面的动力器件都是舵机. 但是大家一般见到的动力器件都是像步进电机,直流电机这一类的动力 ...
- 基于STM32单片机的简单红外循迹的实现
初步接触STM32,采用两路红外传感器实现小车循迹,稍显简略,如有不好的地方,欢迎大家指点改正
- [Mugeda HTML5技术教程之12]制作跨屏互动应用
mugeda动画平台还可以用来制作跨屏互动的动画应用,比如在PC端的大屏幕上显示动画的主界面,同时会显示出供手机扫描的二维码,手机扫描后会在手机上显示手机端动画界面.通过手机就可以和PC端的显示界面跨 ...
- [Mugeda HTML5技术教程之19]制作可定制贺卡
本文档通过一个实例介绍可定制贺卡的动画的制作过程.实例包含两部分: 1. 动画部分:介绍动画制作过程中如何给祝福词和落款的文本对象命名,如何给定制按钮定义表单动作. 2. 代码部分:介绍贺卡的脚本逻辑 ...
- arduino循迹小车
int MotorRight1=14; int MotorRight2=15; int MotorLeft1=16; int MotorLeft2=17; int MotorRPWM=3; int M ...
随机推荐
- Python的变量及简单数据类型
Python的变量及简单类型 1. 变量 在Python编程中,变量是用来存放值或对像的容器.变量的名称可以自定义,但需遵循一定的规范,否则可能会引发一些错误.Python的变量可以分为数字.字符和 ...
- SharePoint 2010 Url Shortener --SharePoint 2010 短URL生成器
SharePoint 2010 Url Shortener --SharePoint 2010 短URL生成器 项目描写叙述 本项目加入了这种功能.在SP站点中能够生成短URLs. 这些URLs指向列 ...
- Weka学习 -- StringToWordVector 源代码学习(1)
代码整个运行流程 參数设置 input数据,设置数据格式 batchFinished(),处理数据(Tokenzier,Stemming,Stopwords) determineDictionary( ...
- 基于C++11的线程池
1.封装的线程对象 class task : public std::tr1::enable_shared_from_this<task> { public: task():exit_(f ...
- Android 防内存泄露handler
Android 防内存泄露handler 1.使用弱引用 WeakRefHander /** * 作者: allen on 15/11/24.感谢开源作者https://coding.net/u/co ...
- JAVA入门[16]-form表单,上传文件
一.如何传递参数 使用 @RequestParam 可以传递查询参数.例如:http://localhost:8092/category/detail?id=1 @RequestMapping(&qu ...
- 如何处理使用js兼容所有浏览器的问题
首先:如何处理兼容问题 1.如果两个都是属性,用逻辑||做兼容 2.如果有一个是方法,用三元做兼容 3.如果是多个属性或方法,封装函数做兼容 分享两个小知识点: 1.取消拖拽的默认行为: docume ...
- 「mysql优化专题」什么是慢查询?如何通过慢查询日志优化?(10)
日志就跟人们写的日记一样,记录着过往的事情.但是人的日记是主观的(记自己想记的内容),而数据库的日志是客观的,根据记录内容分为以下好几种日志(技术文): a.错误日志:记录启动.运行或停止mysqld ...
- eclipse点击空白处自动打开项目
如图 选择上面的 Link with Editor 即可
- Java之路上,让我们Stand Up Again
在开始之前,先发表一下个人想法吧. 在读书的时候每天忙的不可开交,也就没有了所谓的自由,突然参加工作,传统的朝八晚五,标准的八小时工作制,每天都是两点一线,工作中涉及商业机密,公司的东西也不能带回家, ...