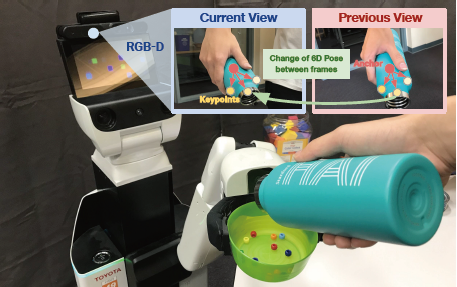
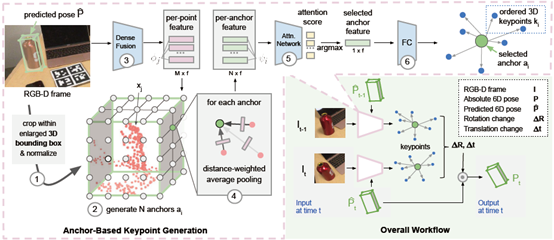
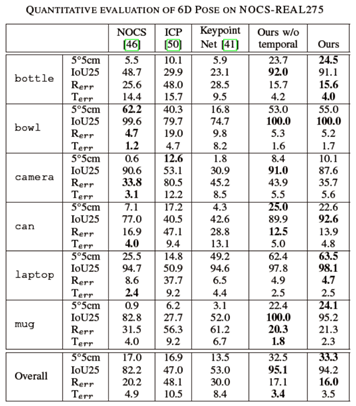
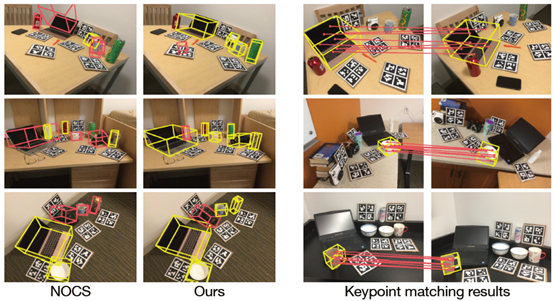
李飞飞团队最新论文:基于anchor关键点的类别级物体6D位姿跟踪
李飞飞团队最新论文:基于anchor关键点的类别级物体6D位姿跟踪的更多相关文章
- ICRA 2019最佳论文公布 李飞飞组的研究《Making Sense of Vision and Touch: Self-Supervised Learning of Multimodal Representations for Contact-Rich Tasks》获得了最佳论文
机器人领域顶级会议 ICRA 2019 正在加拿大蒙特利尔举行(当地时间 5 月 20 日-24 日),刚刚大会公布了最佳论文奖项,来自斯坦福大学李飞飞组的研究<Making Sense of ...
- 李飞飞确认将离职!谷歌云AI总帅换人,卡耐基·梅隆老教授接棒
https://mp.weixin.qq.com/s/i1uwZALu1BcOq0jAMvPdBw 看点:李飞飞正式回归斯坦福,新任谷歌云AI总帅还是个教授,不过这次是全职. 智东西9月11日凌晨消息 ...
- 李飞飞、吴恩达、Bengio等人的15大顶级深度学习课程
目前,深度学习和深度强化学习已经在实践中得到了广泛的运用.资源型博客sky2learn整理了15个深度学习和深入强化学习相关的在线课程,其中包括它们在自然语言处理(NLP),计算机视觉和控制系统中的应 ...
- 2017年度好视频,吴恩达、李飞飞、Hinton、OpenAI、NIPS、CVPR、CS231n全都在
我们经常被问:机器翻译迭代了好几轮,专业翻译的饭碗都端不稳了,字幕组到底还能做什么? 对于这个问题,我们自己感受最深,却又来不及解释,就已经边感受边做地冲出去了很远,摸爬滚打了一整年. 其实,现在看来 ...
- DTCC 2020 | 阿里云李飞飞:云原生分布式数据库与数据仓库系统点亮数据上云之路
简介: 数据库将面临怎样的变革?云原生数据库与数据仓库有哪些独特优势?在日前的 DTCC 2020大会上,阿里巴巴集团副总裁.阿里云数据库产品事业部总裁.ACM杰出科学家李飞飞就<云原生分布式数 ...
- CVPR2020最新论文扫描盘点(下)
CVPR2020最新论文扫描盘点(下) 最近计算机视觉三大顶会之一CVPR2020接收结果已经公布,一共有1470篇论文被接收,接收率为22%,相比去年降低3个百分点,竞争越来越激烈.这里整理来自Tw ...
- CS231n 斯坦福李飞飞视觉识别课程
本文是个人在学习<CS231n 斯坦福李飞飞视觉识别课程>的学习笔记. 第一讲:课程简介 课时1 计算机视觉概述 课时2 计算机视觉历史背景 课时3 课程后勤 选读书籍<DeepLe ...
- CVPR2020最新论文扫描盘点(上)
CVPR2020最新论文扫描盘点(上) 最近计算机视觉三大顶会之一CVPR2020接收结果已经公布,一共有1470篇论文被接收,接收率为22%,相比去年降低3个百分点,竞争越来越激烈.这里整理来自Tw ...
- 物体的三维识别与6D位姿估计:PPF系列论文介绍(三)
作者:仲夏夜之星 Date:2020-04-08 来源:物体的三维识别与6D位姿估计:PPF系列论文介绍(三) 文章“A Method for 6D Pose Estimation of Free-F ...
随机推荐
- OAuth 2.0学习笔记
文章目录 OAuth的作用就是让"客户端"安全可控地获取"用户"的授权,与"服务商提供商"进行互动. OAuth在"客户端&quo ...
- C++ Primer Plus 学习之 类继承
主要介绍了类的继承.虚函数.类继承的动态内存分配问题.继承与友元函数. 公有派生 基类的公有成员和私有成员都会成为派生类的一部分. 基类的私有成员只能通过基类的公有或者保护方法访问.但是,基类指针或引 ...
- android 应用程序与服务端交互
http://www.cnblogs.com/freeliver54/archive/2012/06/13/2547765.html 简述了Service的一些基础知识以及Service和Thread ...
- 传智播客学习之Android运行原理 (转)
传智播客学习之Android运行原理 (2010-03-20 22:45:15) 转载▼ 今天终于忙里偷闲,和大家探讨一下android技术,第一次听到3G应该追溯到大学三年级的时候了,记得当时现代通 ...
- Golang: chan定义问题(7)
通常都是定义读写双向的 chan,定义单向 chan 问题. 专栏的介绍可以参考 <GotchaGolang专栏>,代码可以看<宝库-Gotcha>. 通过 只写 chan 传 ...
- SpringBoot入门系列(一)如何快速创建SpringBoot项目
这段时间也没什么事情,所以就重新学习整理了Spring Boot的相关内容.今天开始整理更新Spring Boot学习笔记,感兴趣的朋友可以关注我的博客:https://www.cnblogs.com ...
- python 字典元组集合字符串
s1 = ''hello, world!'' s2 = '\n\hello, world!\\n' print(s1, s2, end='') s1 = '\141\142\143\x61\x62\x ...
- swagger使用以及一些注解说明
@Api:作用于Conntroller类上 value:字段说明 description:描述 tags:分组 (经常用到tags,例如如下,我只是给value,则默认应用了类名) @ApiOpera ...
- SpringBoot入门系列(二)如何返回统一的数据格式
前面介绍了Spring Boot的优点,然后介绍了如何快速创建Spring Boot 项目.不清楚的朋友可以看看之前的文章:https://www.cnblogs.com/zhangweizhong/ ...
- 常用css3选择器
<div class="wrapper"> <p class="test1">1</p> <p class=" ...