ROS笔记——创建简单的主题发布节点和主题订阅节点
在安装好ROS后,接着学习如何创建节点和节点之间的通信方式,以一个简单的主题发布节点和主题订阅节点说明。
节点是连接ROS网络等可执行文件,是实现某些功能的软件包,也是一个主要计算执行的进程。
一、创建工作空间
创建新文件夹,名字自定义,路径也根据自己设定。
cd ~
mkdir -p ros_workspace
创建好后,就需要将次路径添加到ROS_PACKAGE_PATH中。
查看目前ROS的工作空间,
echo $ROS_PACKAGE_PATH
一般显示如下:
/opt/ros/kinetic/share
下面将路径添加到~/.bashrc中
echo "export ROS_PACKAGE_PATH=~/ros_workspace:${ROS_PACKAGE_PATH}" >> ~/.bashrc
. ~/.bashrc
再次查看ROS正在使用的空间,确保路径正确添加。
二、创建ROS功能包
打开ROS工作目录:
cd ~/ros_workspace
在该目录下创建功能包:
roscreate-pkg test1_tutorials std_msgs rospy roscpp
功能包文件夹下一般包括Makefile、manifest.xml、CMakeLists.txt、mainpage.dox等文件。
std_msgs 包含常见等消息类型
rospy py库
roscpp cpp库
运行命令,查看功能包是否创建
rospack find test1_tutorials
三、编写代码
1、主题发布节点
在功能包中创建src/test1_a.cpp,并添加代码:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream> int main(int argc, char **argv)
{
ros::init(argc,argv,"test1_a");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("message",);
ros::Rate loop_rate();
while(ros::ok()) {
std_msgs::String msg;
std::stringstream ss;
ss << "Hello test1_b! I am test1_a.";
msg.data = ss.str();
ROS_INFO("%s",msg.data.c_str());
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return ;
}
第8行: 初始化,其中第三个参数是节点名称,在ROS系统中必须唯一。
第10行:声明主题message上发布一个消息类型为str_msgs::String的消息,并设置消息缓冲区的大小。
第11行:设置发送消息的频率 10HZ,它追踪自从上一次Rate::sleep()被唤醒之后的持续时间,并在到达时间后继续休眠。
第12行:ros::ok()函数返回值,在下列情况返回false。
- SIGINT句柄接收到Ctrl+C命令来结束;
- 被名称相同的节点提出ROS网络;
- ros::shutdown()被应用的另一部分唤醒。
第18行:把消息通过主题发布出去。
第19行:和下面test1_b.cpp程序ros::spin()进行对比,参考http://www.yfworld.com/?p=2318
2、主题订阅节点
在功能包中创建src/test1_b.cpp,并添加代码:
#include "ros/ros.h"
#include "std_msgs/String.h" void chatterCallback(const std_msgs::String::ConstPtr &msg)
{
ROS_INFO("Hello test1_a! I am test1_b. I heard:[%s]",msg->data.c_str());
} int main(int argc, char **argv)
{
ros::init(argc,argv,"test1_b");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("message",,chatterCallback);
ros::spin(); return ;
}
第4-7行:回调函数,当一个新消息到达指定主题时即调用。
第17行:第一个参数指定订阅主题;第二个参数设置消息缓冲区的大小;第三个参数指定回调函数。
订阅节点需要做四件事情:
1)初始化;
2)从主题订阅消息;
3)然后等待消息到达;
4)当消息到达时,chatterCallback()被回调。
四、编译节点
编辑CMakeLists.txt文件,在末尾处添加如下代码:
rosbuild_add_executable(test1_a src/test1_a.cpp)
rosbuild_add_executable(test1_b src/test1_b.cpp)
rosmake工具进行编译:
rosmake test1_tutorials
五、运行功能包
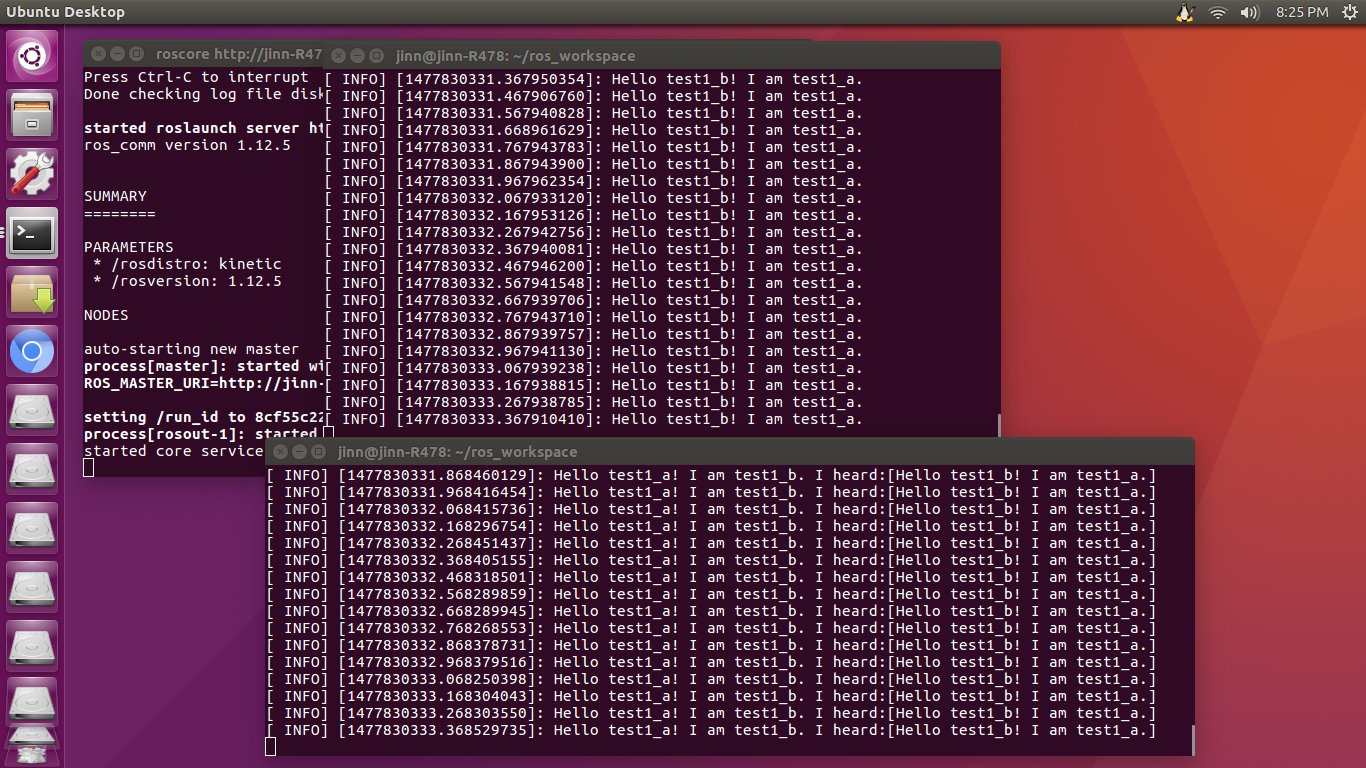
在运行功能包前,请确认节点管理器已经打开。使用下面的命令运行:
roscore
在不同的终端窗口分别运行:
rosrun test1_tutorials test1_a
rosrun test1_tutorials test1_b
可以看到以下信息:
六、参考
http://wiki.ros.org/ROS/Tutorials
《ROS机器人程序设计》 刘品杰 译
(欢迎转载,转载请注明出处。)
ROS笔记——创建简单的主题发布节点和主题订阅节点的更多相关文章
- Web Service 的创建简单编码、发布和部署
最近,老大准备将已有的C/S架构项目中的通信部分做成通用,需要将其支持WebService为以后项目向着B/S架构升级做好铺垫,为此身为屌丝的我去各种百度WebService是个什么卵玩意,然后逐渐搭 ...
- Robot Operating System (ROS)学习笔记---创建简单的机器人模型smartcar
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/243 一.创建硬件描述包 已创建catkin_ ...
- Angular5学习笔记 - 创建、运行、发布项目(一)
一.安装脚手架 npm install -g cnpm --registry=https://registry.npm.taobao.org #安装阿里镜像 npm install -g @angul ...
- ROS学习记录(三)————创建一个简单的发布节点和订阅节点
暑假在家有些懈怠,不,非常懈怠- -||!良心已经发痛了,想快些补回原来的进度,但忽然发现,中断了一段时间再重新去学习,有的地方连最基本的符号都忘记了 ,这次特意弄个最最基础的,恢复一下,以前的进度. ...
- ROS主题发布订阅
节点是一个可执行程序,它连接到了ROS的网络系统中.我们将会创建一个发布者,也就是说话者节点,它将会持续的广播一个信息. 改变目录到之前所建立的那个包下: cd ~/catkin_ws/src/beg ...
- SLAM+语音机器人DIY系列:(二)ROS入门——5.编写简单的消息发布器和订阅器
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS-4 : ROS节点和主题
依照<ROS-3 : Catkin工作空间和ROS功能包>,创建catkin工作空间,并在起src下创建功能包ros_demo_pkg,依赖项为roscpp.std_msgs.action ...
- Ros学习——C++发布器publisher和订阅器subscriber
1.编写发布器 初始化 ROS 系统 在 ROS 网络内广播我们将要在 chatter 话题上发布 std_msgs/String 类型的消息 以每秒 10 次的频率在 chatter 上发布消息 在 ...
- Spark学习笔记0——简单了解和技术架构
目录 Spark学习笔记0--简单了解和技术架构 什么是Spark 技术架构和软件栈 Spark Core Spark SQL Spark Streaming MLlib GraphX 集群管理器 受 ...
随机推荐
- elasticsearch 初学 笔记(1)
使用 curl进行数据的的格式, 1.下载curl,配置路径 格式 C:\Users\Administrator>curl -XPUT http://localhost:9200/dept/em ...
- Jenkins console输出乱码???
jenkins console输出乱码??? 在jenkins中job执行shell,console中出现乱码如下: [WARNING] /home/mtime/data/jenkins/worksp ...
- 自定义一个类似UIAlertView的弹出框
这个是和UIAlertView类似,但是可以自定义view的样式废话不多说,上代码: 首先第一步:创建一个继承自View的类如: #import <UIKit/UIKit.h> @clas ...
- 个人博客作业week7
个人阅读作业week7 一.瀑布 软件工程的瀑布模型是1970年由Winston Royce提出来的,即软件的开发按照一个严格的.顺序的.单次的瀑布流开发周期.例如需求分析阶段.概要设计阶段.详细设计 ...
- ROWID伪列
ROWID伪列概念: 在数据表中每一行所保存的记录,oracle会为每条记录分配一个唯一的地址编号,这个编号就是通过ROWID表示的. 所有的数据都利用ROWID进行定位. 观察rowid的存在 SQ ...
- mac系统安装node
1.node 是通过brew来安装的,所以第一步先安装brew ruby -e "$(curl -fsSL https://raw.githubusercontent.com/Homebre ...
- select 和 input 的不可编辑,input隐藏
select 没有readOnly属性 在jsp中 <select id="a" name="a" disabled="disabled&qu ...
- <mvc:annotation-driven/>与<context:annotation-config/>的区别
在使用注解的方式配置SSM的时候一般会配置<mvc:annotation-driven/>与<context:annotation-config/>,有时候会对两者的概念有些区 ...
- SQLite 事务
SQLite数据库是支持事务的,事务的特性可以保证让一系列的操作要么全部完成要么一个都不会完成. 一.调用SQLDatabase的beginTransaction()开起一个事务,当事务处理完成,调用 ...
- python操作csv和excel文件
1.操作csv文件 1).读取文件 import csv f=open("test.csv",'r') t_text=csv.reader(f) for t,i in t_text ...