verilog实现的16位CPU设计
verilog实现的16位CPU设计
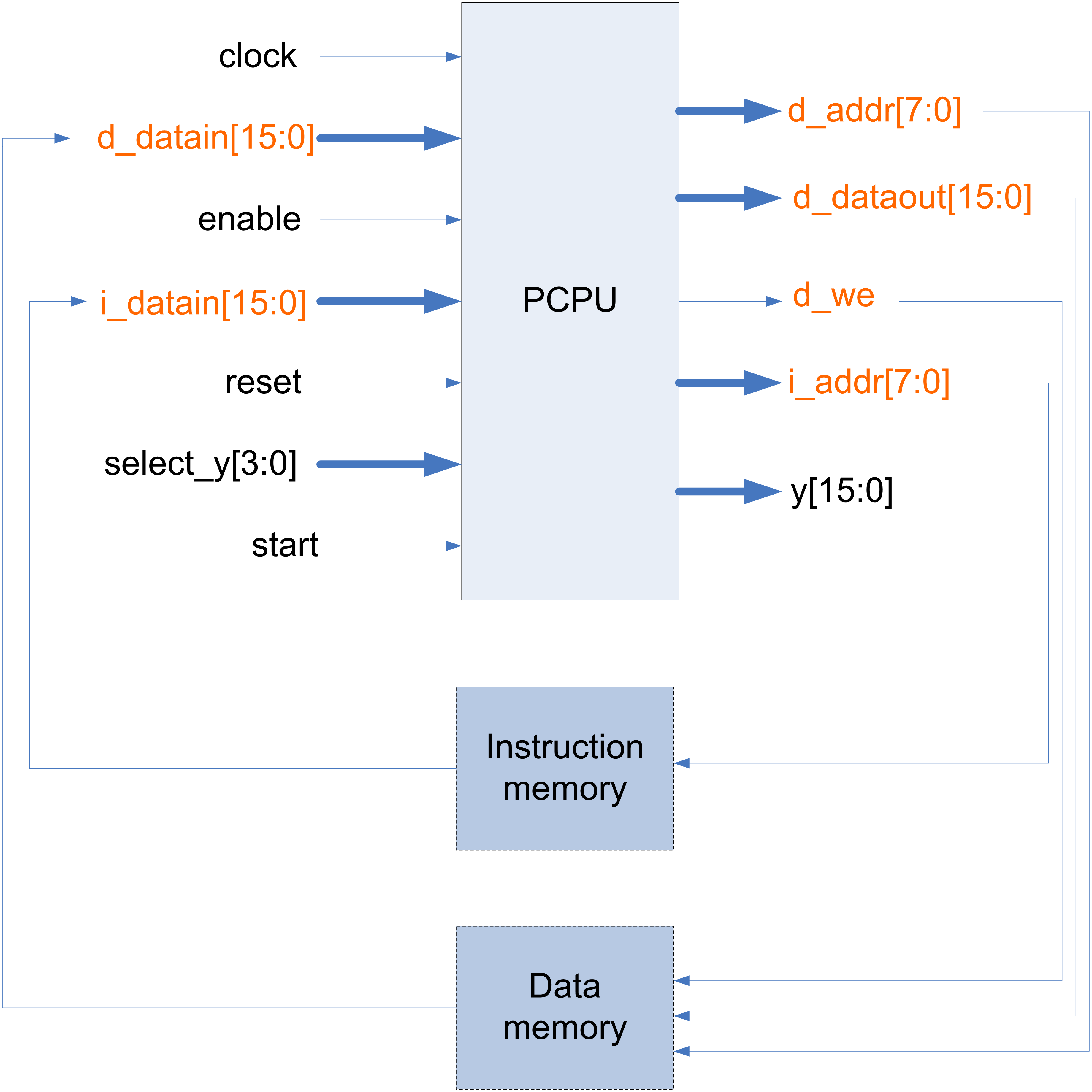
整体电路图
CPU状态图
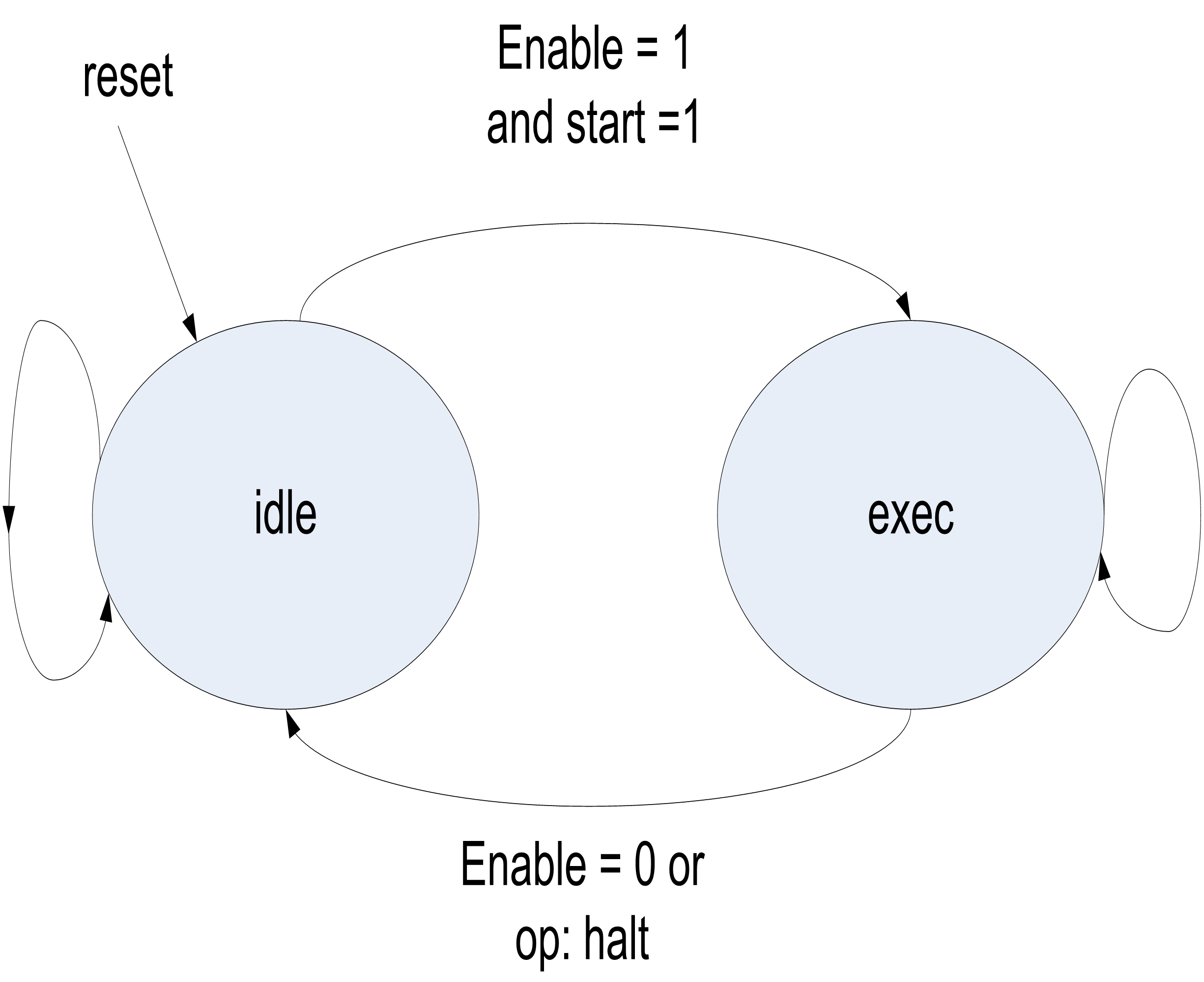
idle代表没有工作,exec代表在工作
实验设计思路
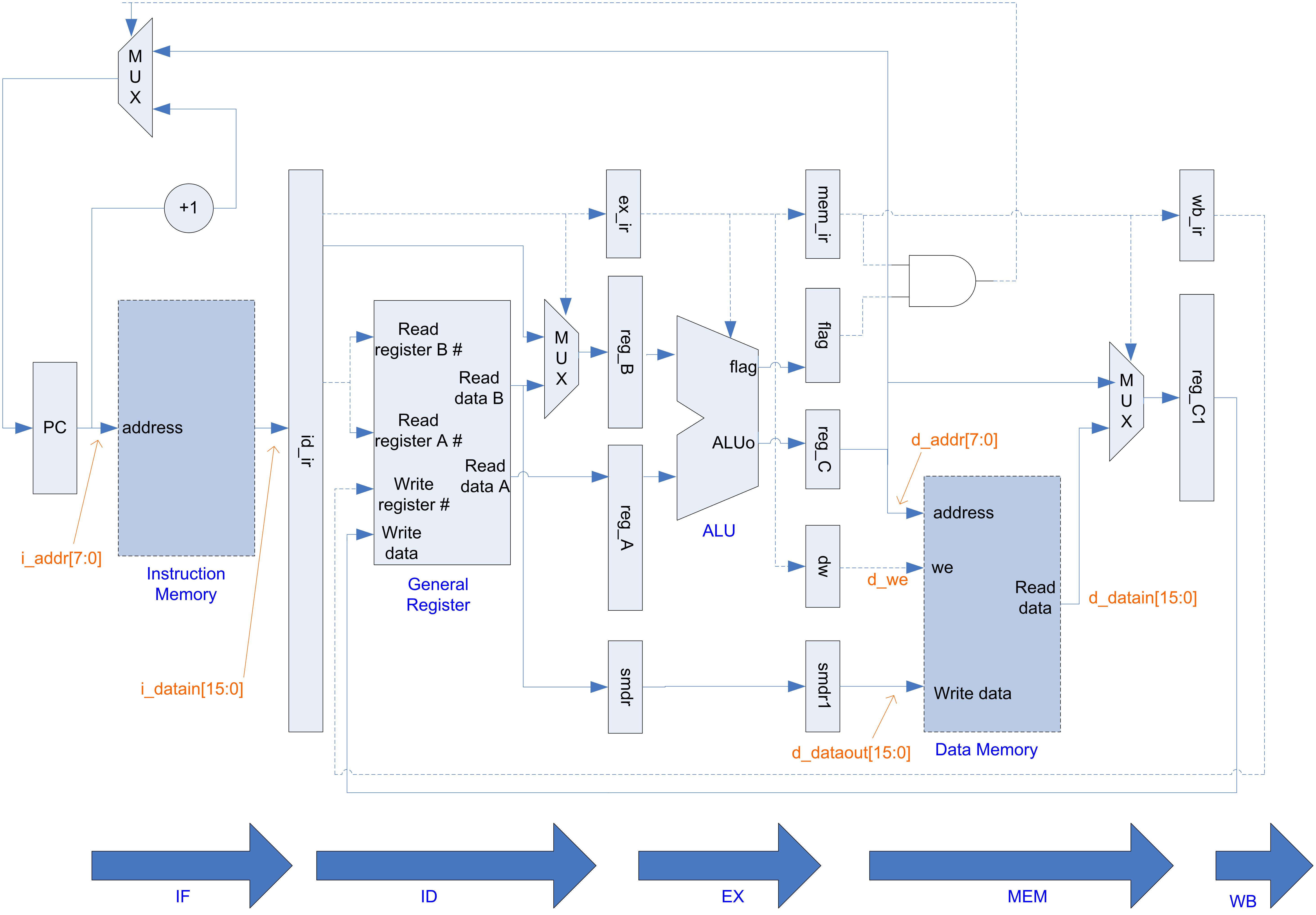
五级流水线,增加硬件消耗换取时间的做法。
具体每一部分写什么将由代码部分指明。
完整代码
headfile.v
头文件定义。包含整个工程中的特殊变量定义。后文中只用到gr0到gr3部分,因此该部分没写gr4到gr7,有需要的同学请自行加上。
`ifndef HEADFILE_H_
//State for CPU
`define idle 1'b0
`define exec 1'b1
//Data transfer & Arithmetic
`define NOP 5'b00000
`define HALT 5'b00001
`define LOAD 5'b00010
`define STORE 5'b00011
`define LDIH 5'b10000
`define ADD 5'b01000
`define ADDI 5'b01001
`define ADDC 5'b10001
`define CMP 5'b01100
//Logical / shift
`define AND 5'b01101
`define SLL 5'b00100
`define SLA 5'b00101
//Control
`define JUMP 5'b11000
`define JMPR 5'b11001
`define BZ 5'b11010
`define BNZ 5'b11011
`define BN 5'b11100
`define BC 5'b11110
//Add by myself
`define SUB 5'b01010
`define SUBI 5'b01011
`define SUBC 5'b10010
`define OR 5'b01110
`define XOR 5'b01111
`define SRL 5'b00110
`define SRA 5'b00111
`define BNN 5'b11101
`define BNC 5'b11111
//gr
`define gr0 3'b000
`define gr1 3'b001
`define gr2 3'b010
`define gr3 3'b011
`endif
CPU.v
这个是整个工程的顶层模块。输入100MHz时钟信号,四个开关选择控制七段译码管显示的内容,用button来控制CPU的一次流水线。
首先三个部分的时钟快慢要求不一样。七段译码器的时钟要求最快,要实时显示内容;memory的时钟要求较快,在PCPU下一级流水线到来之前完成数据读写。PCPU模块的时钟要求最慢,这个只是相对前面来说较慢。整个CPU的工作频率是比较快的。
`timescale 1ns / 1ps
module CPU(
input clk,
input enable,
input reset,
input [3:0] SW,
input start,
input button,
output [6:0] light,
output [3:0] en
);
wire PCPU_clk;
wire MEM_clk;
wire LIGHT_clk;
wire [15:0] d_datain;
wire [15:0] i_datain;
wire [3:0] select_y;
wire [7:0] d_addr;
wire [15:0] d_dataout;
wire d_we;
wire [7:0] i_addr;
wire [15:0] y;
clk_div getMEMclk(
.orgin_clk(clk),
.reset(reset),
.div(16'b0100_0000_0000_0000),
.div_clk(MEM_clk)
);
clk_div getLIGHTclk(
.orgin_clk(clk),
.reset(reset),
.div(16'b0010_0000_0000_0000),
.div_clk(LIGHT_clk)
);
PCPUcontroller PCPUctrl(
.myclk(clk),
.button(button),
.reset(reset),
.sense(PCPU_clk)
);
PCPU pcpu(
.clock(PCPU_clk),
.enable(enable),
.reset(reset),
.start(start),
.d_datain(d_datain),
.i_datain(i_datain),
.select_y(SW),
.d_addr(d_addr),
.d_dataout(d_dataout),
.d_we(d_we),
.i_addr(i_addr),
.y(y)
);
I_mem i_mem(
.mem_clk(MEM_clk),
.addr(i_addr),
.rdata(i_datain)
);
D_mem d_mem(
.mem_clk(MEM_clk),
.dwe(d_we),
.addr(d_addr),
.wdata(d_dataout),
.rdata(d_datain)
);
light_show show_light(
.light_clk(LIGHT_clk),
.reset(reset),
.y(y),
.light(light),
.en(en)
);
endmodule
clk_div.v
时钟分频模块,要是开始做CPU设计了还不会时钟分频的话,那我没话说了。不解释,贴代码。
`timescale 1ns / 1ps
module clk_div(
input orgin_clk,
input reset,
input [15:0] div,
output reg div_clk
);
reg [15:0] count;
always@(posedge orgin_clk or posedge reset)
begin
if(reset)
begin
div_clk <= 0;
count <= 0;
end
else
begin
if(count == div)
begin
div_clk <= ~div_clk;
count <= 0;
end
else
count <= count + 1'b1;
end
end
endmodule
PCPUcontroller.v
PCPU模块的状态控制模块。因为用的button来手动控制CPU的流水线,以免时钟太快一下子就跑完了。实现的方法是用状态机,加入trap状态,实现消抖。具体想不明白的话,建议自己画一下状态机转移图,聪明的你一定会明白的。
`timescale 1ns / 1ps
module PCPUcontroller(
input myclk,
input button,
input reset,
output reg sense
);
parameter STOP = 2'b00, INC = 2'b01, TRAP = 2'b10;
reg [1:0] state, nextstate;
always@(posedge myclk or posedge reset)
begin
if(reset)
state <= STOP;
else
state <= nextstate;
end
always@(*)
begin
case(state)
STOP:
if(button) nextstate <= INC;
else nextstate <= STOP;
INC: nextstate <= TRAP;
TRAP:
if(button) nextstate <= TRAP;
else nextstate <= STOP;
default: nextstate <= STOP;
endcase
end
always@(*)
begin
if(reset)
sense <= 0;
else
case(state)
INC: sense <= 1'b1;
default: sense <= 1'b0;
endcase
end
endmodule
PCPU.v
整个工程中最核心的部分。注释部分是冲突处理之后的。如不需要冲突处理,把注释部分指明的代码注释掉即可。对应于前图中的五级流水线,该部分的代码亦分为五部分,请自行研啃。
`timescale 1ns / 1ps
`include"headfile.v"
module PCPU(
input clock,
input enable,
input reset,
input start,
input [15:0] d_datain,
input [15:0] i_datain,
input [3:0] select_y,
output wire [7:0] d_addr,
output wire [15:0] d_dataout,
output wire d_we,
output wire [7:0] i_addr,
output reg [15:0] y
);
reg state;
reg [7:0] pc;
reg [15:0] id_ir;
reg [15:0] ex_ir, reg_A, reg_B, smdr;
reg [15:0] mem_ir, reg_C, smdr1; reg dw; reg flag; reg [15:0] ALUo;reg zf, nf, cf;
reg [15:0] wb_ir, reg_C1;
reg [15:0] gr[0:7];
assign d_dataout = smdr1;
assign d_we = dw;
assign d_addr = reg_C[7:0];
assign i_addr = pc;
/*******CPUcontrol**********************/
reg nextstate;
always@(posedge clock or posedge reset)
begin
if(reset)
state <= `idle;
else
state <= nextstate;
end
always@(*)
begin
case(state)
`idle:
if((enable == 1'b1) && (start == 1'b1))
nextstate <= `exec;
else
nextstate <= `idle;
`exec:
if((enable == 1'b0) || (wb_ir[15:11] == `HALT))
nextstate <= `idle;
else
nextstate <= `exec;
endcase
end
/***************************************/
/****************IF*********************/
always@(posedge clock or posedge reset)
begin
if(reset)
begin
id_ir <= 16'b0000_0000_0000_0000;
pc <= 8'b0000_0000;
end
else if(state == `exec)
begin
/*************Hazard*******************/
if((id_ir[15:11] == `LOAD)
&&(i_datain[15:11] == `ADD)
&&((id_ir[10:8] == i_datain[7:4])
||(id_ir[10:8] == i_datain[3:0])))
begin
id_ir <= 16'bxxxx_xxxx_xxxx_xxxx;
pc <= pc;
end
/**************************************/
else
begin
id_ir <= i_datain;
if(((mem_ir[15:11] == `BZ) && (zf == 1'b1))
||((mem_ir[15:11] == `BN) && (nf == 1'b1))
||((mem_ir[15:11] == `BC) && (cf == 1'b1))
||((mem_ir[15:11] == `BNZ) && (zf == 1'b1))
||((mem_ir[15:11] == `BNN) && (nf == 1'b1))
||((mem_ir[15:11] == `BNZ) && (cf == 1'b1)))
pc <= reg_C[7:0];
else if((mem_ir[15:11] == `JUMP)
||(mem_ir[15:11] == `JMPR))
pc <= reg_C[7:0];
else
pc <= pc + 1'b1;
end
end
else
begin
pc <= pc;
id_ir <= id_ir;
end
end
/***************************************/
/****************ID*********************/
always@(posedge clock or posedge reset)
begin
if(reset)
begin
ex_ir <= 16'b0000_0000_0000_0000;
reg_A <= 16'b0000_0000_0000_0000;
reg_B <= 16'b0000_0000_0000_0000;
smdr <= 16'b0000_0000_0000_0000;
end
else if(state == `exec)
begin
ex_ir <= id_ir;
if(id_ir[15:11] == `STORE) //for Hazard Mode
smdr <= ALUo;
//reg_A
/********************Hazard**********************/
if(wb_ir[15:11] == `LOAD && id_ir[7:4] == wb_ir[10:8])
reg_A <= reg_C1;
else if(mem_ir[15:11] == `LOAD && id_ir[7:4] == mem_ir[10:8])
reg_A <= d_datain;
else if(ex_ir[15:11] != `LOAD && id_ir[7:4] == ex_ir[10:8])
reg_A <= ALUo;
else if(mem_ir[15:11] != `LOAD && id_ir[7:4] == mem_ir[10:8])
reg_A <= reg_C;
else if(wb_ir[15:11] != `LOAD && id_ir[7:4] == wb_ir[10:8])
reg_A <= reg_C1;
else
begin
/***********************************************/
if((id_ir[15:11] == `BZ)
||(id_ir[15:11] == `BN)
||(id_ir[15:11] == `JMPR)
||(id_ir[15:11] == `BC)
||(id_ir[15:11] == `BNZ)
||(id_ir[15:11] == `BNN)
||(id_ir[15:11] == `BNC)
||(id_ir[15:11] == `ADDI)
||(id_ir[15:11] == `SUBI)
||(id_ir[15:11] == `LDIH))
reg_A <= gr[(id_ir[10:8])];
else
reg_A <= gr[(id_ir[6:4])];
end
//reg_B
/********************Hazard*********************/
if(wb_ir[15:11] == `LOAD && id_ir[3:0] == wb_ir[10:8])
reg_B <= reg_C1;
else if(mem_ir[15:11] == `LOAD && id_ir[3:0] == mem_ir[10:8])
reg_B <= d_datain;
else if(ex_ir[15:11] != `LOAD && id_ir[3:0] == ex_ir[10:8])
reg_B <= ALUo;
else if(mem_ir[15:11] != `LOAD && id_ir[3:0] == mem_ir[10:8])
reg_B <= reg_C;
else if(wb_ir[15:11] != `LOAD && id_ir[3:0] == wb_ir[10:8])
reg_B <= reg_C1;
else
begin
/***********************************************/
if((id_ir[15:11] == `LOAD)
||(id_ir[15:11] == `SLL)
||(id_ir[15:11] == `SLA)
||(id_ir[15:11] == `SRL)
||(id_ir[15:11] == `SRA))
reg_B <= {12'b0000_0000_0000, id_ir[3:0]};
else if((id_ir[15:11] == `BZ)
||(id_ir[15:11] == `BN)
||(id_ir[15:11] == `JUMP)
||(id_ir[15:11] == `JMPR)
||(id_ir[15:11] == `BC)
||(id_ir[15:11] == `BNZ)
||(id_ir[15:11] == `BNN)
||(id_ir[15:11] == `BNC)
||(id_ir[15:11] == `ADDI))
reg_B <= {8'b0000_0000, id_ir[7:0]};
else if((id_ir[15:11] == `STORE))
begin
reg_B <= {12'b0000_0000_0000, id_ir[3:0]};
//smdr <= gr[(id_ir[10:8])]; //for not Hazard
end
else if(id_ir[15:11] == `LDIH)
reg_B <= {id_ir[7:0], 8'b0000_0000};
else
reg_B <= gr[id_ir[2:0]];
end
end
else
begin
ex_ir <= ex_ir;
reg_A <= reg_A;
reg_B <= reg_B;
smdr <= smdr;
end
end
/***************************************/
/****************EX*********************/
always@(posedge clock or posedge reset)
begin
if(reset)
begin
mem_ir <= 16'b0000_0000_0000_0000;
reg_C <= 16'b0000_0000_0000_0000;
smdr1 <= 16'b0000_0000_0000_0000;
zf <= 1'b0;
nf <= 1'b0;
cf <= 1'b0;
dw <= 1'b0;
end
else if(state == `exec)
begin
mem_ir <= ex_ir;
reg_C <= ALUo;
cf <= cf_temp;
if((ex_ir[15:11] == `ADD)
||(ex_ir[15:11] == `CMP)
||(ex_ir[15:11] == `ADDI)
||(ex_ir[15:11] == `SUB)
||(ex_ir[15:11] == `SUBI)
||(ex_ir[15:11] == `LDIH)
||(ex_ir[15:11] == `SLL)
||(ex_ir[15:11] == `SRL)
||(ex_ir[15:11] == `SLA)
||(ex_ir[15:11] == `SRA)
||(ex_ir[15:11] == `ADDC)
||(ex_ir[15:11] == `SUBC))
begin
if(ALUo == 16'b0000_0000_0000_0000)
zf <= 1'b1;
else
zf <= 1'b0;
if(ALUo[15] == 1'b1)
nf <= 1'b1;
else
nf <= 1'b0;
end
else if(ex_ir[15:11] == `STORE)
begin
dw <= 1'b1;
smdr1 <= smdr;
end
end
else
begin
reg_C <= reg_C;
smdr1 <= smdr1;
dw <= dw;
end
end
//ALU
reg cf_temp;
always@(*)
begin
if(state == `exec)
begin
if(reset)
begin
ALUo <= 16'b0000_0000_0000_0000;
cf_temp <= 0;
end
else
case(ex_ir[15:11])
`NOP: {cf_temp, ALUo} <= {cf_temp, ALUo};
`HALT: {cf_temp, ALUo} <= {cf_temp, ALUo};
`AND: {cf_temp, ALUo} <= {cf_temp, reg_A & reg_B};
`OR: {cf_temp, ALUo} <= {cf_temp, reg_A | reg_B};
`XOR: {cf_temp, ALUo} <= {cf_temp, reg_A ^ reg_B};
`SLL: {cf_temp, ALUo} <= {cf_temp, reg_A << reg_B};
`SRL: {cf_temp, ALUo} <= {cf_temp, reg_A >> reg_B};
`SLA: {cf_temp, ALUo} <= {cf_temp, reg_A <<< reg_B};
`SRA: {cf_temp, ALUo} <= {cf_temp, reg_A >>> reg_B};
`JUMP: {cf_temp, ALUo} <= {cf_temp, reg_B};
`LDIH: {cf_temp, ALUo} <= {1'b0 + reg_A} + {1'b0 + reg_B};
`ADD: {cf_temp, ALUo} <= {1'b0 + reg_A} + {1'b0 + reg_B};
`ADDI: {cf_temp, ALUo} <= {1'b0 + reg_A} + {1'b0 + reg_B};
`ADDC: {cf_temp, ALUo} <= {1'b0 + reg_A} + {1'b0 + reg_B} + cf;
`SUB: {cf_temp, ALUo} <= {1'b0 + reg_A} - {1'b0 + reg_B};
`SUBI: {cf_temp, ALUo} <= {1'b0 + reg_A} - {1'b0 + reg_B};
`SUBC: {cf_temp, ALUo} <= {1'b0 + reg_A} - {1'b0 + reg_B} - cf;
`CMP: {cf_temp, ALUo} <= {1'b0 + reg_A} - {1'b0 + reg_B};
`LOAD: begin ALUo <= reg_A + reg_B; cf_temp <= cf_temp; end
`STORE: begin ALUo <= reg_A + reg_B; cf_temp <= cf_temp; end
`JMPR: begin ALUo <= reg_A + reg_B; cf_temp <= cf_temp; end
`BZ: begin ALUo <= reg_A + reg_B; cf_temp <= cf_temp; end
`BNZ: begin ALUo <= reg_A + reg_B; cf_temp <= cf_temp; end
`BN: begin ALUo <= reg_A + reg_B; cf_temp <= cf_temp; end
`BNN: begin ALUo <= reg_A + reg_B; cf_temp <= cf_temp; end
`BC: begin ALUo <= reg_A + reg_B; cf_temp <= cf_temp; end
`BNC: begin ALUo <= reg_A + reg_B; cf_temp <= cf_temp; end
default: {cf_temp, ALUo} <= {cf_temp, ALUo};
endcase
end
end
/***************************************/
/***************MEM*********************/
always@(posedge clock or posedge reset)
begin
if(reset)
begin
reg_C1 <= 16'b0000_0000_0000_0000;
wb_ir <= 16'b0000_0000_0000_0000;
end
else if(state == `exec)
begin
wb_ir <= mem_ir;
if(mem_ir[15:11] == `LOAD)
reg_C1 <= d_datain;
else
reg_C1 <= reg_C;
end
end
/***************************************/
/****************WB********************/
always@(posedge clock or posedge reset)
begin
if(reset)
begin
gr[0] <= 16'b0000_0000_0000_0000;
gr[1] <= 16'b0000_0000_0000_0000;
gr[2] <= 16'b0000_0000_0000_0000;
gr[3] <= 16'b0000_0000_0000_0000;
gr[4] <= 16'b0000_0000_0000_0000;
gr[5] <= 16'b0000_0000_0000_0000;
gr[6] <= 16'b0000_0000_0000_0000;
gr[7] <= 16'b0000_0000_0000_0000;
end
else if(state == `exec)
begin
if((wb_ir[15:11] == `LOAD)
||(wb_ir[15:11] == `ADD)
||(wb_ir[15:11] == `ADDI)
||(wb_ir[15:11] == `ADDC)
||(wb_ir[15:11] == `SUB)
||(wb_ir[15:11] == `SUBI)
||(wb_ir[15:11] == `SUBC)
||(wb_ir[15:11] == `AND)
||(wb_ir[15:11] == `OR)
||(wb_ir[15:11] == `XOR)
||(wb_ir[15:11] == `SLL)
||(wb_ir[15:11] == `SRL)
||(wb_ir[15:11] == `SLA)
||(wb_ir[15:11] == `SRA)
||(wb_ir[15:11] == `LDIH))
gr[wb_ir[10:8]] <= reg_C1;
end
else
begin
end
end
/***************************************/
/**************select Y*****************/
always@(*)
begin
case(select_y)
4'b0000: y <= reg_C;
4'b0001: y <= reg_A;
4'b0010: y <= reg_B;
4'b0011: y <= {pc, 8'b0000_0000};
4'b0100: y <= id_ir;
4'b0101: y <= smdr;
4'b0110: y <= reg_C1;
4'b0111: y <= smdr1;
4'b1000: y <= ex_ir;
4'b1001: y <= mem_ir;
4'b1010: y <= wb_ir;
default: y <= reg_C;
endcase
end
/***************************************/
endmodule
I_mem.v
指令存储区域。把指令写在这一部分,即可让CPU跑指定的指令。
`timescale 1ns / 1ps
`include"headfile.v"
module I_mem(
input mem_clk,
input [7:0] addr,
output wire [15:0] rdata
);
reg [15:0] i_mem [255:0];
assign rdata = i_mem[addr];
always@(posedge mem_clk)
begin
case(addr)
0: i_mem[addr] <= {`ADDI, `gr1, 4'b1010, 4'b1011};
1: i_mem[addr] <= {`LDIH, `gr2, 4'b0011, 4'b1100};
2: i_mem[addr] <= {`ADD, `gr3, 1'b0, `gr1, 1'b0, `gr2};
3: i_mem[addr] <= {`STORE, `gr3, 1'b0, `gr0, 4'b0000};
4: i_mem[addr] <= {`ADDI, `gr1, 4'b0001, 4'b0001};
5: i_mem[addr] <= {`LDIH, `gr2, 4'b0001, 4'b0001};
6: i_mem[addr] <= {`ADD, `gr3, 1'b0, `gr1, 1'b0, `gr2};
7: i_mem[addr] <= {`STORE, `gr3, 1'b0, `gr0, 4'b0001};
8: i_mem[addr] <= {`LOAD, `gr1, 1'b0, `gr0, 4'b0000};
9: i_mem[addr] <= {`LOAD, `gr2, 1'b0, `gr0, 4'b0001};
10: i_mem[addr] <= {`ADD, `gr3, 1'b0, `gr1, 1'b0, `gr2};
11: i_mem[addr] <= {`STORE, `gr3, 1'b0, `gr0, 4'b0001};
12: i_mem[addr] <= {`JUMP, 4'b0000, 4'b0010, 4'b1000};
13: i_mem[addr] <= {`ADDI, `gr1, 4'b1010, 4'b1011};
40: i_mem[addr] <= {`HALT, 11'b000_0000_0000};
default: i_mem[addr] <= {`NOP, 11'b000_0000_0000};
endcase
end
endmodule
D_mem.v
数据存储区域。结构简单,根据dwe信号来决定是读取还是写入。
`timescale 1ns / 1ps
`include"headfile.v"
module D_mem(
input mem_clk,
input dwe,
input [7:0] addr,
input [15:0] wdata,
output wire [15:0] rdata
);
reg [15:0] d_mem [255:0];
assign rdata = d_mem[addr];
always@(posedge mem_clk)
begin
if(dwe)
d_mem[addr] <= wdata;
end
endmodule
light_show.v
七段译码管显示模块。
`timescale 1ns / 1ps
module light_show(
input light_clk,
input reset,
input [15:0] y,
output reg [6:0] light,
output reg [3:0] en
);
reg [1:0] dp;
reg [3:0] four;
always@(posedge light_clk or posedge reset)
begin
if(reset)
dp <= 0;
else
begin
dp <= dp + 1'b1;
end
end
always@(*)
begin
if(reset)
begin
four <= 0;
en <= 0;
end
else
begin
case(dp)
0: begin four <= y[3:0]; en <= 4'b1110; end
1: begin four <= y[7:4]; en <= 4'b1101; end
2: begin four <= y[11:8]; en <= 4'b1011; end
3: begin four <= y[15:12]; en <= 4'b0111; end
default: begin four <= 0; en <= 0; end
endcase
end
end
always@(*)
begin
if(reset)
begin
light <= 7'b0001000;
end
else
begin
case(four)
0: light <= 7'b0000001;
1: light <= 7'b1001111;
2: light <= 7'b0010010;
3: light <= 7'b0000110;
4: light <= 7'b1001100;
5: light <= 7'b0100100;
6: light <= 7'b0100000;
7: light <= 7'b0001111;
8: light <= 7'b0000000;
9: light <= 7'b0000100;
4'b1010: light <= 7'b0001000;
4'b1011: light <= 7'b1100000;
4'b1100: light <= 7'b0110001;
4'b1101: light <= 7'b1000010;
4'b1110: light <= 7'b0110000;
4'b1111: light <= 7'b0111000;
default: light <= 7'b0000001;
endcase
end
end
endmodule
VTF_CPU.v
仿真测试文件。
`timescale 1ns / 1ps
module VTF_CPU;
// Inputs
reg clk;
reg enable;
reg reset;
reg [3:0] SW;
reg start;
reg button;
// Outputs
wire [6:0] light;
wire [3:0] en;
// Instantiate the Unit Under Test (UUT)
CPU uut (
.clk(clk),
.enable(enable),
.reset(reset),
.SW(SW),
.start(start),
.button(button),
.light(light),
.en(en)
);
initial begin
// Initialize Inputs
clk = 0;
enable = 0;
reset = 0;
SW = 0;
start = 0;
button = 0;
// Wait 100 ns for global reset to finish
#100;
$display("pc: id_ir :reg_A:reg_B:reg_C:da:dd: :w:reC1:gr1 :gr2 : gr3");
$monitor("%h:%b:%h:%h:%h:%h:%h:%b:%h:%h:%h:%h",
uut.pcpu.pc, uut.pcpu.id_ir, uut.pcpu.reg_A, uut.pcpu.reg_B, uut.pcpu.reg_C,
uut.d_addr, uut.d_dataout, uut.d_we, uut.pcpu.reg_C1, uut.pcpu.gr[1], uut.pcpu.gr[2], uut.pcpu.gr[3]);
enable <= 0; start <= 0;
// Add stimulus here
#10 reset <= 1;
#10 reset <= 0;
#10 enable <= 1;
#10 start <=1;
//#10 start <= 0;
#100;
end
always #20 button = ~button;
always #5 clk = ~clk;
endmodule
verilog实现的16位CPU设计的更多相关文章
- verilog实现的16位CPU单周期设计
verilog实现的16位CPU单周期设计 这个工程完成了16位CPU的单周期设计,模块化设计,包含对于关键指令的仿真与设计,有包含必要的分析说明. 单周期CPU结构图 单周期CPU设计真值表与结构图 ...
- 16位CPU多周期设计
16位CPU多周期设计 这个工程完成了16位CPU的多周期设计,模块化设计,有包含必要的分析说明. 多周期CPU结构图 多周期CPU设计真值表 对应某一指令的情况,但仅当对应周期时才为对应的输出,不是 ...
- 16位cpu下主引导扇区及用户程序的编写
一些约定 主引导扇区代码(0面0道1扇区)加载至0x07c00处 用户程序头部代码需包含以下信息:程序总长度.程序入口.重定位表等信息 用户程序 当虚拟机启动时,在屏幕上显示以下两句话: This i ...
- 对所有CPU寄存器的简述(16位CPU14个,32位CPU16个)
32位CPU所含有的寄存器有:4个数据寄存器(EAX.EBX.ECX和EDX)2个变址和指针寄存器(ESI和EDI)2个指针寄存器(ESP和EBP)6个段寄存器(ES.CS.SS.DS.FS和GS)1 ...
- 16位/32位/64位CPU的位究竟是说啥
平时,我们谈论CPU,都会说某程序是32位编译,可以跑在32位机或64位机,或则是在下载某些开源包时,也分32位CPU版本或64CPU位版本,又或者在看计算机组成相关书籍时,特别时谈到X86 CPU时 ...
- Intel X86 32位CPU内存管理----《Linux内核源码情景分析》笔记(一)
Intel X86 32位CPU内存管理 在X86系列中,8086和8088是16为处理器,而从80386开始为32为处理器,80286则是该系列从8088到80386,也就是16位处理器到32位处理 ...
- 32位CPU和64位CPU 区别
操作系统只是硬件和应用软件中间的一个平台. 32位操作系统针对的32位的CPU设计. 64位操作系统针对的64位的CPU设计.操作系统只是硬件和应用软件中间的一个平台. 32位操作系统针对的32位的C ...
- 梦回----32位CPU和64位CPU的通用寄存器
1 32位Intel的CPU通用寄存器 32位CPU所含有的寄存器有:4个数据寄存器(EAX.EBX.ECX和EDX):2个变址和指针寄存器(ESI和EDI):2个指针寄存器(ESP和EBP):6个段 ...
- 通用32位CPU 常用寄存器及其作用
目录 32位CPU所含有的寄存器 数据寄存器 变址寄存器 指针寄存器 段寄存器 指令指针寄存器 标志寄存器 32位CPU所含有的寄存器 4个数据寄存器(EAX.EBX.ECX和EDX) 2个变址和指针 ...
随机推荐
- 简单封装axios api
可以在代码逻辑中写axios请求,处理请求结果,但是随着项目越来越大,代码会很繁琐,不容易维护,所以,可以把一些在所有请求中都要处理的逻辑抽取出来,封装成api方法.比如每次请求中都要判断是否有权限, ...
- 配置内核源码make menuconfig时出现 #include CURSES_LOC错误
配置内核时出现如下错误: liuxin@sunshine-virtual-machine:~/work/nfs_root/system/linux-2.6.22.6$ make menuconfig ...
- 查看SQLServer数据库表占用大小
查看数据库mdf 文件中 各个表数据占用大小. create table #t(name varchar(255), rows bigint, reserved varchar(20), ...
- JDBC数据库连接池
用户每次请求都需要向数据库获得链接,而数据库创建连接通常需要消耗相对较大的资源,创建时间也较长.假设网站一天10万访问量,数据库服务器就需要创建10万次连接,极大的浪费数据库的资源,并且极易造成数据库 ...
- composer gitlab 搭建私包
一.建立私包git 1.执行composer init 根据提示生成composer.json 2.编辑composer.json 目录格式 { "name": "iar ...
- C#学习笔记(基础知识回顾)之值类型与引用类型转换(装箱和拆箱)
一:值类型和引用类型的含义参考前一篇文章 C#学习笔记(基础知识回顾)之值类型和引用类型 1.1,C#数据类型分为在栈上分配内存的值类型和在托管堆上分配内存的引用类型.如果int只不过是栈上的一个4字 ...
- HDU3629:Convex
传送门 求凸四边形的个数 转化成总数减去凹四边形的个数 凹四边形一定是一个三角形中间包含的另外一个点 那么枚举被包含的点,其它的对于这个点极角排序 被包含不好算,算总数减去不被包含的 枚举三角形的一个 ...
- gulp 打包报错:Error: `libsass` bindings not found. Try reinstalling `node-sass`
看了网上很多帖子 有说切换node版本的 有说卸载重新装gulp-sass的 有说删除node_modules重新install的 但是我测试了下在我们的电脑环境下都不行,后来找到一个可以打包不报错的 ...
- vue2.0路由写法
// 0. 如果使用模块化机制编程,導入Vue和VueRouter,要调用 Vue.use(VueRouter) // 1. 定义(路由)组件. // 可以从其他文件 import 进来 var Fo ...
- 【Win32】对指定进程进行禁音
使用例子如下: CAudioMgr AudioMgr; AudioMgr.SetProcessMute(GetCurrentProcessId()); H文件的内容如下: #pragma once # ...