[UE4]机器人射击逻辑行为树
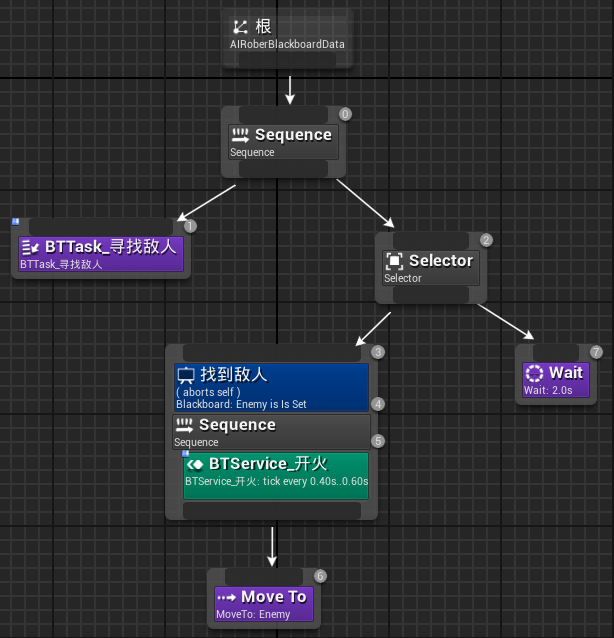
1、寻找敌人
2、如果没有找到,等待2秒,跳转到1
3、如果找到了,走向敌人
4、走向敌人的过程中,如果看见敌人了,则射击
5、如果敌人没有了,则跳转到1
[UE4]机器人射击逻辑行为树的更多相关文章
- UE4中的AI行为树简单介绍
UE4引擎中可以实现简单AI的方式有很多,行为树是其中比较常用也很实用的AI控制方式,在官网的学习文档中也有最简单的目标跟踪AI操作教程,笔者在这里只作简单介绍. AIController->和 ...
- [Bzoj3205][Apio2013]机器人(斯坦纳树)(bfs)
3205: [Apio2013]机器人 Time Limit: 15 Sec Memory Limit: 128 MBSubmit: 977 Solved: 230[Submit][Status] ...
- [UE4]机器人自动寻路
要让机器人能够自动寻路,需要画出自动寻路的范围,可以使用“Nav Mesh Bounds Volume”组件来自定寻路范围 通过“Delay”节点可以实现让AI执行Move To以后停顿1秒,然后继 ...
- [UE4]修改射击方向
- [UE4]添加射击的准心
其实就是创建一个UI Widget,在UI Widget中添加一个准心图片(png)格式,准心图片设置为屏幕居中对齐,然后在自定义的GameMode中把这个UI Widget添加到视图中.
- UE4简单AI
首先做个小小的声明把,由于俺之前也没接触过AI ,所以有一些专业的词汇可能翻译存在各种问题,如果你发现的话,还是希望能够提出来哦,我们一起进步. 记住配合视频食用更佳哦~ 视频连接:http://ww ...
- 移植UE4的Spline与SplineMesh组件到Unity5
一个月前,想开始看下UE4的源码,刚开始以为有Ogre1.9与Ogre2.1源码的基础 ,应该还容易理解,把源码下起后,发现我还是想的太简单了,UE4的代码量对比Ogre应该多了一个量级,毕竟Ogre ...
- 【网络流24题】No.8 机器人路径规划问题
[题意] 机器人 Rob 可在一个树状路径上自由移动. 给定树状路径 T 上的起点 s 和终点 t, 机器人 Rob 要从 s 运动到 t. 树状路径 T 上有若干可移动的障碍物. 由于路径狭窄, 任 ...
- 【自然语言处理篇】--Chatterbot聊天机器人
一.前述 ChatterBot是一个基于机器学习的聊天机器人引擎,构建在python上,主要特点是可以自可以从已有的对话中进行学(jiyi)习(pipei). 二.具体 1.安装 是的,安装超级简单, ...
随机推荐
- day 04 Java并发多线程
http://www.cnblogs.com/hellocsl/p/3969768.html?utm_source=tuicool&utm_medium=referralPS:而JVM 每遇到 ...
- nginx配置.htaccess伪静态
https://blog.csdn.net/moqiang02/article/details/37695775
- oracle-gi安装
############################################### 在cs6.5,cs7.2上安装grid11.2.0.1 和database11.2.0.1还是有问题 1 ...
- 实现一个函数,可以左旋字符串中的k个字符
ABCD左旋一个字符得到BCDAABCD左旋两个字符得到CDAB ABCD BACD BCAD BCDA CBDA CDBA CDAB 发现规律: 如果左旋一个字符则可以将第一个字符依次与后面的字符交 ...
- Yuan先生的博客网址
1 Web应用 https://www.cnblogs.com/yuanchenqi/articles/8869302.html 2 http协议 https://www.cnblogs.com/y ...
- 原生JavaScript实现跨域
为什么需要跨域呢?这是因为我们一般的请求都是使用xhr的,但是它只能调用同一个域里面的接口,有时候,我们想要在自己的站点中调用其他站点的接口,这时候就要用到跨域了.其实,跨域并不难,我们可以通过Jav ...
- [转]Spring中property-placeholder的使用与解析
我们在基于spring开发应用的时候,一般都会将数据库的配置放置在properties文件中. 代码分析的时候,涉及的知识点概要: NamespaceHandler 解析xml配置文件中的自定义命名空 ...
- TypeScript 之 泛型
https://m.runoob.com/manual/gitbook/TypeScript/_book/doc/handbook/Generics.html 泛型:可以支持多种类型的数据 泛型函数的 ...
- 代码问题: 【ADNet】
[ADNet]: Yoo S, Yun K, Choi J Y. Action-Decision Networks for Visual Tracking with Deep Reinforcemen ...
- java-文件和I/O
理解IO:http://www.importnew.com/23708.html 一.读写文件: FileInputStream 该流用于从文件读取数据,它的对象可以用关键字 new 来创建. 有多种 ...