deeplearning.ai 卷积神经网络 Week 3 目标检测 听课笔记
本周的主题是对象检测(object detection):不但需要检测出物体(image classification),还要能定位出在图片的具体位置(classification with localization),而且要能处理图片中的多个物体(detection)。
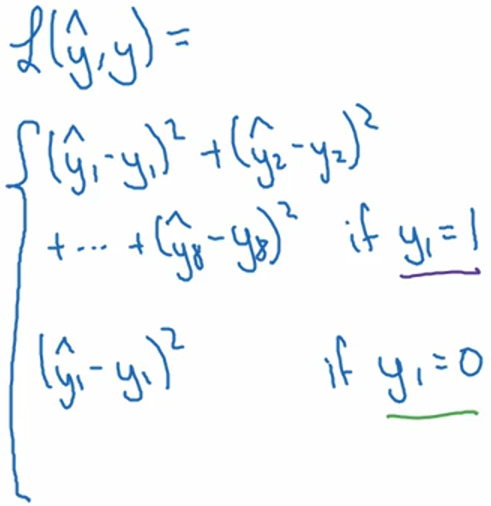
1. 例子:无人驾驶中确定图片是否有1)行人;2)小汽车;3)摩托车,并用矩形标记出物体在图像中的位置(bx、by、bh、bw),如果三类目标都没有,则标记为4)背景。使用softmax分类这四种情况。这里只考虑每张图片最多有一个目标的情况。输出y = [pc, bx, by, bh, bw, c1, c2, c3]T。其中pc表示图片中是否有目标,c1、c2、c3表示该对象术语哪一类。如果图片中有一辆车,则标签y = [1, bx, by, bh, bw, 0, 1, 0]T;如果图片中没有目标,则标签y = [0, ?, ?, ?, ?, ?, ?, ?]T,问号表示一旦pc为0,其他参数都不重要。

第二个例子是人脸检测,往往我们会需要提取出若干关键点(landmark)(例如眼角、嘴角等)的像素位置,这里我们假设有64个关键点,此时的标签可以设置为 y = [pc, l1x, l1y, l2x, l2y, ..., l64x, l64y]T。pc表示图片中是否有人脸。类似的还有人体检测,也是若干关键点(例如肘关节、肩关节等)。
2. 滑动窗口目标检测(sliding windows detection)
用从小到大不同大小的window去滑动遍历图片的每一部分,送入神经网络看这个区域是否有目标。这种方法的缺点是计算量太大。对于同一个window来说,滑动过程中截取的图片,会有很多共同区域,是不需要重复运算的。所以实际实现的时候(Sermanet et al., 2014, OverFeat: Integrated recognition, localization and detection using convolutional networks),我们是把整张图送给神经网络,最后得到的结果等价于先截取不同部分图片喂给系统,然后把得到结果拼成矩阵。如下图所示,上一行是常规的对14*14*3的图片进行处理,得到1*1*4的结果(对应上一段的例子行人、小汽车、摩托车和背景),下一行是大一些的图片16*16*3,我们不需要把它分割成四个14*14*3的图片分别执行前向传播,而是把它作为一张图片给系统进行计算,其中的公有区域可以共享很多计算,最后得到的2*2*4的结果,每个1*1*4对应一个子图片的结果。

3. 确定bouding box的位置
上一段滑动窗口的方法可以找到目标,但是不能输出最精确的边界框。这一节的内容就是得到更精确的边界框。
YOLO算法(Redmon et al., 2015, You Only Look Once: Unified real-time object detection):把输入图片分成网格(这里选择了3*3,实际部署的时候会选择更密的网格比如19*19,这些网格之间是没有交集的,是纯纯的切开,不像滑动窗口),然后把这些格子逐一送给神经网络做前向计算(这里的逐一只是表达每个格子单独作用,实际情况是像滑动窗口的卷积实现一样把整张图片送给系统,只计算一次前向传播),每个格子会输出一个8*1的向量(y = [pc, bx, by, bh, bw, c1, c2, c3]T),所以最终输出3*3*8的矩阵。然后再是精细化的把每个网格内的物体拼成一个整体,最终得到精确的边界框。
每个grid内的bx和by的取值范围是0~1之间,因为中心点必定在当前网格内(否则就属于其他网格),而bh和bw是有可能大于1的(即物体长度或者宽度大于网格边长)。这是一种最方便的参数化方法,论文里有一些更复杂的参数化方法。
NG推荐读YOLO的论文,友情提示说这篇论文非常难懂,他自己第一次看完全不知道作者在说什么,咨询了好一些资深的研究员,他们也不清楚。
4. 交并比函数(Intersection over union,IoU)
IoU一方面可以用来评价object detection算法,另一方面也可以作为参数改善算法。具体做法是计算两个边界框(一个是真实值,一个是预测值)交集和并集面积的比值。一般约定俗成的标准是0.5(这个值并没有什么理论依据,只是习惯,NG说也看到人设成更严格的0.6、0.7,但很少看到有人设到0.5以下),即IoU≥0.5,就说检测正确。如果预测完美等同于真实值,则 IoU=1。
5. 非极大值抑制(Non-max suppression)
算法可能会对同一个对象作出多次检测,非极大值抑制的目的是保证算法对每个对象只检测一次。
如果只检测一个目标,具体做法是:
1)每个边界框都会给检测出物体的概率,丢掉所有概率低于某个阈值(比如0.6)的边界框。
2)选出剩下边界框中最大概率那个并高亮,对于剩下的边界框,只要它和最大概率边界框的IoU小于某个阈值(比如0.5),则它就会被抑制(变暗)。重复执行这一步,直到遍历完所有的边界框。
3)这时候图上所有的边界框要么被高亮,要么变暗,可以直接扔掉变暗的边界框,只留下被高亮的,这些就是我们的预测结果。
如果是检测多个目标,比如三个,则把上述流程针对不同的目标重复三遍。
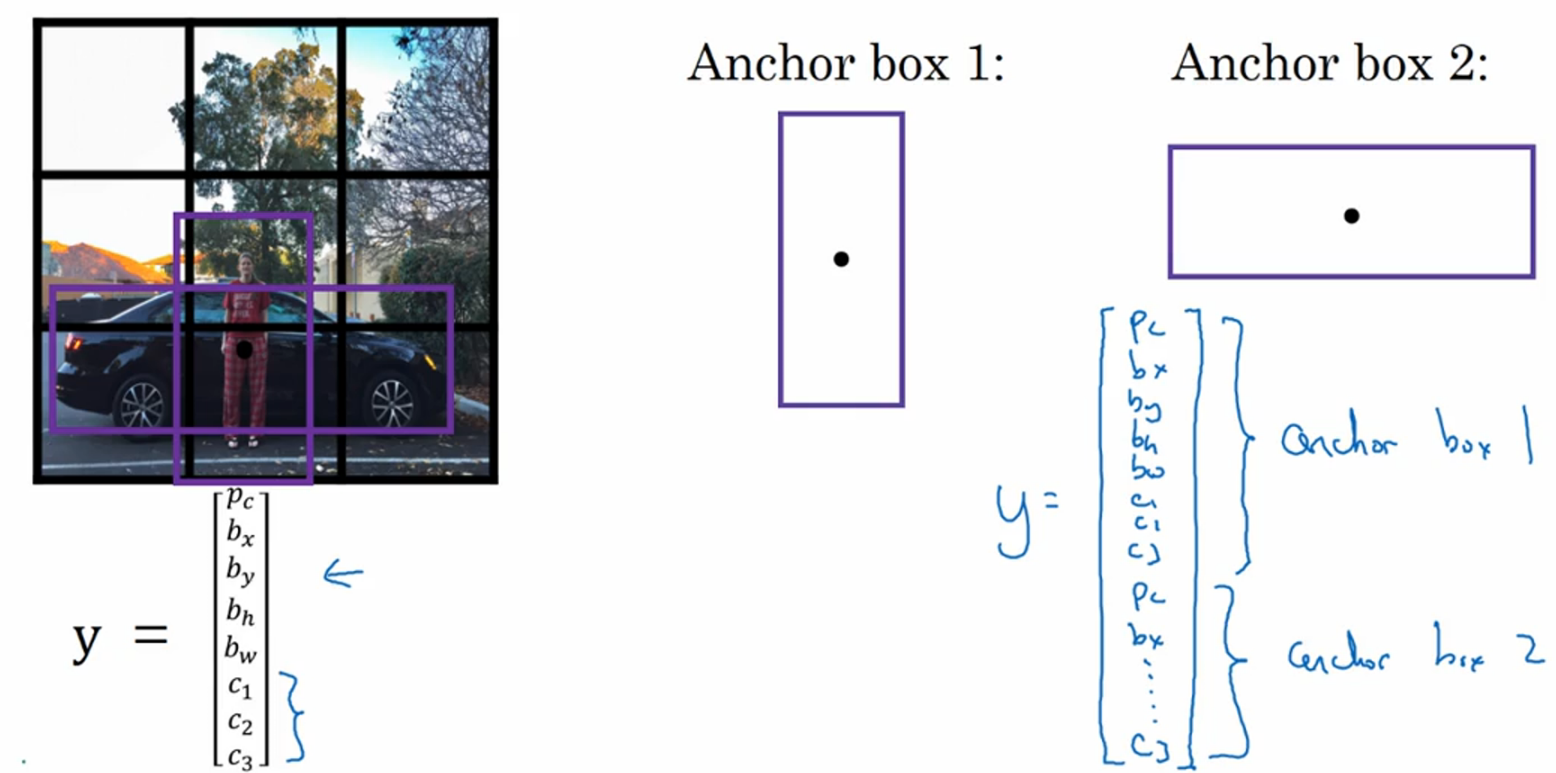
6. Anchor boxes
目的是让一个格子可以检测出多个对象。具体做法是引入人手工设计的模型(这里叫anchor boxes),比如行人就对应瘦高的竖着的矩形,汽车就对应矮胖的躺着的矩形。这时,标签y被拓展成16*1的向量,每个格子可以被标记出两个物体(标签的前八个元素对应anchor box 1,后八个对应anchor box 2)。这种做法有效的原因就是让目标检测更有针对性。
该算法没办法处理以下几种情况:1)如果只有两个anchor box,却有三类物体;2)如果两个物体分到同一个格子,并且它们的anchor box也是一样的。不过幸运的是这两种情况出现的概率不大,尤其是当我们把格子分得很细(比如19*19)。一般anchor box是手工设计的,可以选择5个甚至10个不同的anchor box,覆盖更多的不同的形状。更高阶的版本是用k-means算法选择anchor box。
7. Region proposal (候选区域)
NG说region proposal的想法在目标检测领域也很有影响力,但是他自己相对用的比较少。
R-CNN(Girshik et. al., 2013. Rich feature hierarchies for accurate object detection and semantic segmentation.),意思是带区域(regions)的卷积网络,它尝试选出一些区域,在这些区域上运行卷机网络分类器是有意义的。具体做法是先用一个分割算法(segmentation algorithm),先找出可能2000多个色块(blob),然后在这2000多个色块上放置边界框并跑分类器,这样要处理的区域会少很多。
Fast R-CNN(Girshik, 2015. Fast R-CNN),用卷积的方式实现sliding window,并对所有候选区域执行分类计算。但得到候选区域的聚类算法依旧很慢。
Faster R-CNN(Ren et. al., 2016. Faster R-CNN: Towards real-time object detection with region proposal networks.),用卷积神经网络找候选区域。
NG说R-CNN的加速版本还是比YOLO慢得多。R-CNN需要两步:先找候选区域,再检测特征。相比之下,能够一步做完的YOLO是长远看来更有希望的方向。NG说这只是他一家之言。
deeplearning.ai 卷积神经网络 Week 3 目标检测 听课笔记的更多相关文章
- deeplearning.ai 卷积神经网络 Week 3 目标检测
本周的主题是对象检测(object detection):不但需要检测出物体(image classification),还要能定位出在图片的具体位置(classification with loca ...
- deeplearning.ai 卷积神经网络 Week 4 特殊应用:人脸识别和神经风格转换 听课笔记
本周课程的主题是两大应用:人脸检测和风格迁移. 1. Face verification vs. face recognition Verification: 一对一的问题. 1) 输入:image, ...
- deeplearning.ai 卷积神经网络 Week 1 卷积神经网络 听课笔记
1. 传统的边缘检测(比如Sobel)手工设计了3*3的filter(或者叫kernel)的9个权重,在深度学习中,这9个权重都是学习出来的参数,会比手工设计的filter更好,不但可以提取90度.0 ...
- deeplearning.ai 卷积神经网络 Week 1 卷积神经网络
1. 传统的边缘检测(比如Sobel)手工设计了3*3的filter(或者叫kernel)的9个权重,在深度学习中,这9个权重都是学习出来的参数,会比手工设计的filter更好,不但可以提取90度.0 ...
- deeplearning.ai 卷积神经网络 Week 2 深度卷积网络:实例研究 听课笔记
1. Case study:学习经典网络的原因是它们可以被迁移到其他任务中. 1.1)几种经典的网络: a)LeNet-5(LeCun et al., 1998. Gradient-based lea ...
- deeplearning.ai 卷积神经网络 Week 2 卷积神经网络经典架构
1. Case study:学习经典网络的原因是它们可以被迁移到其他任务中. 1.1)几种经典的网络: a)LeNet-5(LeCun et al., 1998. Gradient-based lea ...
- deeplearning.ai 人工智能行业大师访谈 Andrej Karpathy 听课笔记
1. 本科的时候在多伦多大学上Geoffrey Hinton的课,在MNIST数字数据集上训练受限玻尔兹曼机,觉得很有趣.后来在UBC读硕士,上了另一门机器学习的课,那是他第一次深入了解神经网络的相关 ...
- deeplearning.ai 人工智能行业大师访谈 Geoffrey Hinton 听课笔记
1. 怀揣着对大脑如何存储记忆的好奇,Hinton本科最开始学习生物学和物理学,然后放弃,转而学习哲学:然后觉得哲学也不靠谱,转而学习心理学:然后觉得心理学在解释大脑运作方面也不给力,转而做了一段时间 ...
- deeplearning.ai 人工智能行业大师访谈 Yoshua Bengio 听课笔记
1. 如何走上人工智能的研究的?Bengio说他小时候读了很多科幻小说,1985年(64年出生,21岁)研究生阶段开始阅读神经网络方面的论文,对这个领域产生了热情. 2. 如何看深度学习这些年的发展? ...
随机推荐
- 个人的MySql配置总结
lower_case_table_names参数是用来设置MySQL是否让Schema和数据表大小写敏感,我测试的是在查询界面和MySQL控制台界面无法改变它的值,要在配置文件中改变(先关闭服务),一 ...
- ABP .Net Core API和Angular前端APP集成部署
前言:在ABP官网(https://aspnetboilerplate.com)生成的.Net Core + Angular项目前后端是两个独立的项目,我们可以分开部署,也可以将前端和Web API一 ...
- http性能测试工具wrk源码学习之开篇
1.前言 最近工作需要测试nginx反向代理的性能,于是找了一些http测试工具,例如经典的Apache的ab.siege.wrk.wrk使用多线程事件驱动方式,支持lua脚本扩展.关于wrk介绍可以 ...
- ArcGIS 网络分析[2.3] 最近设施点
什么是最近设施点? 仍然举一个生动形象例子说明. 我在大街的某一个点儿上,我急需上厕所,问:我3分钟内能到的最近的厕所在哪? 这就是最近设施点分析(ClosestFacility)--给定搜索半径,基 ...
- bzoj 3991: [SDOI2015]寻宝游戏
Description 小B最近正在玩一个寻宝游戏,这个游戏的地图中有N个村庄和N-1条道路,并且任何两个村庄之间有且仅有一条路径可达.游戏开始时,玩家可以任意选择一个村庄,瞬间转移到这个村庄,然后可 ...
- Java 浅析Thread.join()
概要 本文分为三部分对 Thread.join() 进行分析: 1. join() 的示例和作用 2. join() 源码分析 3. 对网上其他分析 join() 的文章提出疑问 1. join() ...
- 【http转https】其之三 IIS_URL重写_http重定向到https
IIS_URL重写_http重定向到https 文:铁乐猫 2016年1月14日 IIS7以上支持URL Rewrite这个模块了,所以在我们做好了ssl证书这一块之后, 要对来自http的请求重定向 ...
- Head First设计模式之生成器模式
一.定义 将一个复杂对象的构建与它的表示分离,使得同样的构建过程可以创建不同的表示.建造者模式是一种对象创建型模式. 二.结构 角色 Builder(抽象建造者):它为创建一个产品Product对象的 ...
- 解决myeclipse部署按钮不能点
找到MyEclipse的工作路径(一般点开myeclipse是会显示),然后到这个目录中去“\.metadata\.plugins\org.eclipse.core.runtime\.settings ...
- MicroPython教程之TPYBoard开发板DIY小型家庭气象站
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生.跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢? 海拔高度测量 对 ...