[3] ScanRefer论文精读 3DVisual Grounding开山之作
论文名称:ScanRefer: 3D Object Localization in RGB-D Scans using Natural Language
这篇文章最主要的工作,我觉得是两个,第一,提出了一个问题;第二,比较简单地解决了这个问题。
Project page: https://daveredrum.github.io/ScanRefer/
3D Visual Grounding
提出这个问题,是这篇文章的核心,也因此,作者在Abstract上方首先插入了一张图:
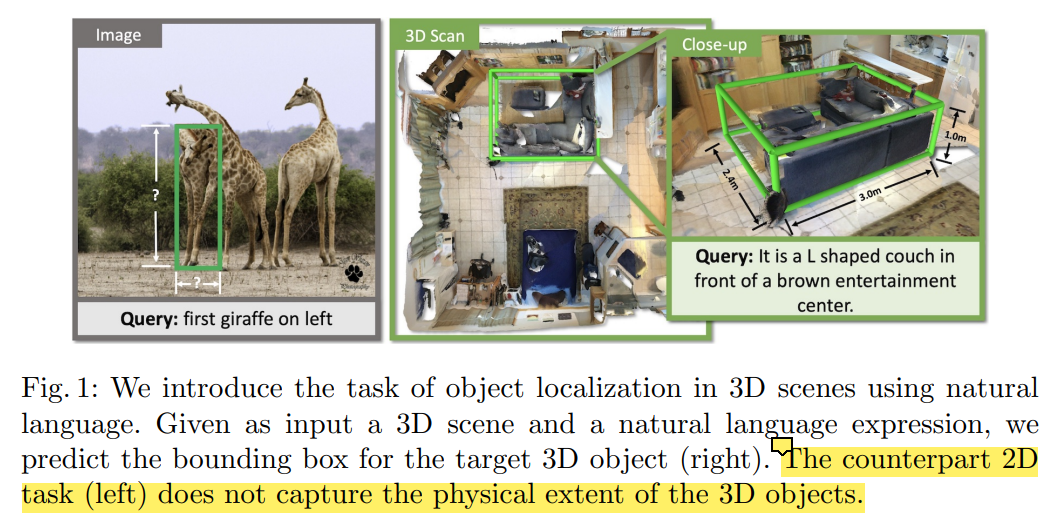
他说,我们“introduce”一个task,我其实也是第一次读这类挖大坑的文章,很有意思,毕竟只有这种刚开始起步的方向,我才会专门去找一下开头读一读。开篇讲了3D Visual Grounding到底是在做什么,与2d有什么区别,很清晰。
然后他还说:
ScanReferDataSet
挖坑之作,提出问题,你要解决问题,当然需要与这个问题相关的数据集,那你挖的坑,当然你也要给出一个数据集。
这个领域的数据集重点就在于文本和场景的匹配了,而不是场景的采集,因此这个数据集是基于ScanNet数据集来做的(一个1613个RGBD室内场景的数据集)。有了场景,我们就要对场景中的object进行label了,因为是自然语言做label,所以这部分必然逃不过人工,做不到完全的自动化。作者团队做了一个网站,然后请了一批人(好像是大学生志愿者)来作标定,首先是做标注,就是给你一个场景,然后给你标出这个场景的某个物体,要求你用自然语言描述这个物体的位置(或者物体本身的特征),你的描述最终必须指向这个特定的物体。等这批人标记完成之后,再选另外一批人来验证这些标记,即看看他们的表述是否真的唯一地指向空间中的某个场景,同时要检查表述中是否有错误拼写啊,错误的语法啊之类的。
文章的补充材料里把他们的UI还做了个好多截图贴进来:
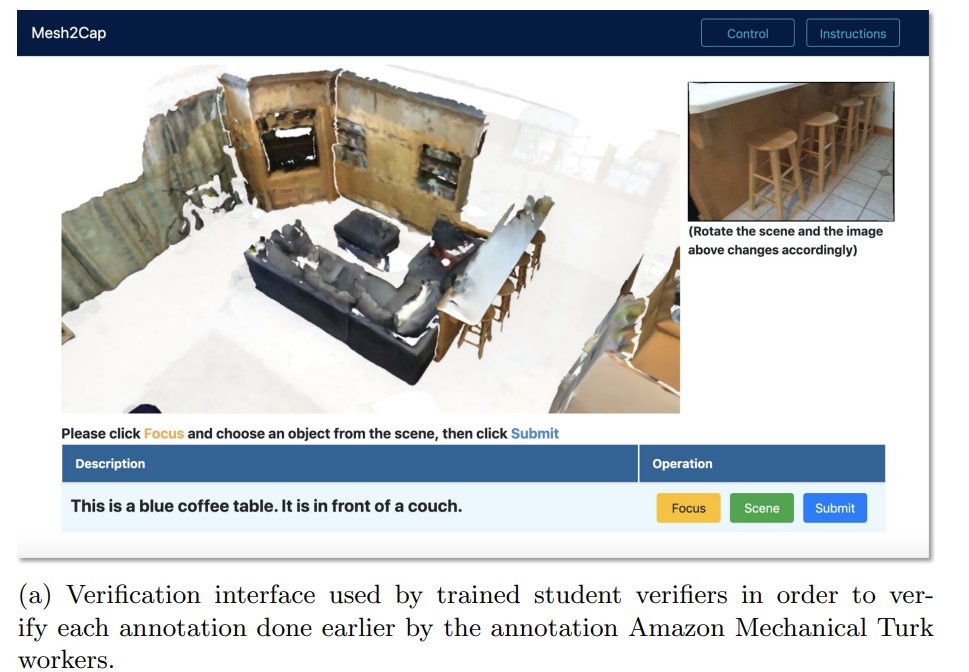
我也是第一次读这种做一个数据集的文章,讲道理,数据集构建占了相当大的篇幅,包括各种角度的数据分布,数据集采集过程,谁采集的,采集后验证过程修改了多少错误单词和错误表述等等,十分详细。
只不过这个数据集好像不如ReferIt3D数据集更被大家接受?还不知道为何,走走看。哦对咱也不知道为什么有了ScanRefer,ReferIt3D还要花心思再去构建一个新的数据集,偶不,两个。
Method
这个模型,怎么说呢,复杂也不是很复杂,但是作为一个双模态的任务肯定也简单不了,我们可以看一下。
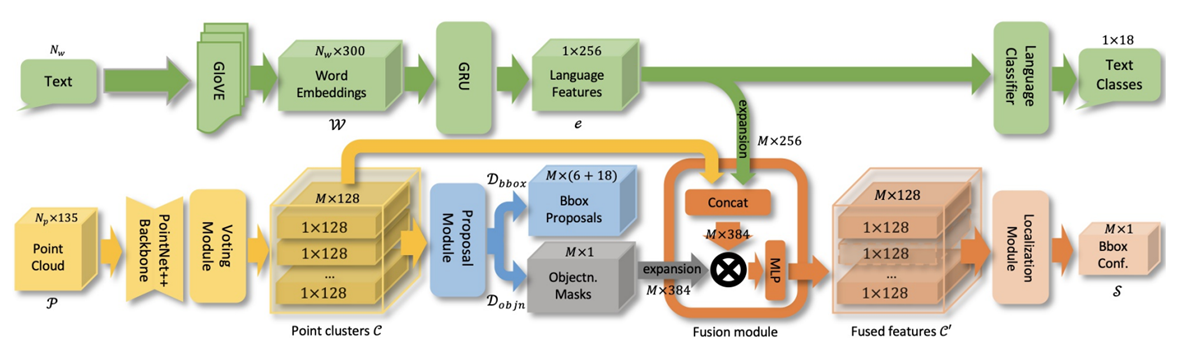
文本编码器
首先,text先进入GloVe模型(应该是被预训练好的模型,和Word2Vec是同一类很火的专门做词向量的模型)得到这个表述的Embedding,然后送入GRU(一种类似LSTM但是比LSTM的性能好的网络)得到语言特征,后面加了一个文本分类器,其实就是对提取到的语言特征进行分类,看看能不能找到它指向的类别,这里做了一个Loss,算是对GRU的一个有监督的强化。(这个东西其实MVT也有,我还以为那是MVT作者干的,没想到这玩意在开山之作里面就已经出现了。。。)
点云编码器+目标检测器
没啥可说的,PointNet++提取点云特征,利用Voting Module来做目标检测?这个地方的子论文没读,做完目标检测,得到M个点云簇(原作者M设置的是256),然后再对256个box(或者叫proposal更合适)进行mask。
模态融合器
所谓的模态融合大家也看到了,就是简单粗暴的concat起来,很naive,但是确实也无所谓,这不是这篇工作的重点了已经。对concat之后的高维矩阵进行mask,直接把mask矩阵(向量)广播成融合后数据的形状,直接乘过来,0的地方就被mask掉了,方便,粗暴,就得到了融合后的features。
定位器
所谓的定位部分也非常简单,就是一点FC,然后过一个Softmax,把得分最高的proposal选出来,就算是完成了定位。
可以看到,整个模型是非常简单甚至有些naive的,发展空间很大。
实验部分
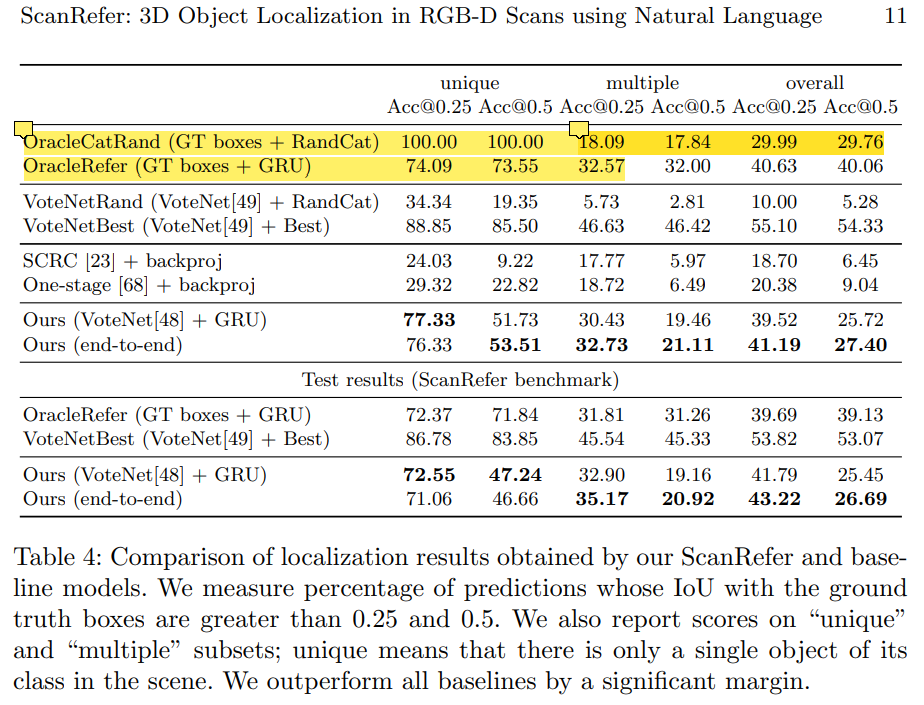
讲道理,他这个表格和表述我看的不是很懂,一方面是可能我第一次看这类文章很不适应,另一方面是这里面涉及到的工作我都不了解。
大概就是,每一组,上面是baseline,下面是他们的东西?不太理解,而且他们为什么要强调自己end to end?看得有点蒙。
而且用GT box我觉得属实是有点在玩的感觉了……我没找到这个比较的意义……
但是可能这也不是重点吧,重点可能是:

[3] ScanRefer论文精读 3DVisual Grounding开山之作的更多相关文章
- 【深度学习 论文篇 02-1 】YOLOv1论文精读
原论文链接:https://gitee.com/shaoxuxu/DeepLearning_PaperNotes/blob/master/YOLOv1.pdf 笔记版论文链接:https://gite ...
- 这部分布式事务开山之作,凭啥第一天预售就拿下当当新书榜No.1?
大家好,我是冰河~~ 今天,咱们就暂时不聊[精通高并发系列]了,今天插播一下分布式事务,为啥?因为冰河联合猫大人共同创作的分布式事务领域的开山之作--<深入理解分布式事务:原理与实战>一书 ...
- 用深度学习(DNN)构建推荐系统 - Deep Neural Networks for YouTube Recommendations论文精读
虽然国内必须FQ才能登录YouTube,但想必大家都知道这个网站.基本上算是世界范围内视频领域的最大的网站了,坐拥10亿量级的用户,网站内的视频推荐自然是一个非常重要的功能.本文就focus在YouT ...
- 【DL论文精读笔记】Object Detection in 20 Y ears: A Survey目标检测综述
目标检测20年综述(2019) 摘要 Abstract 该综述涵盖了400篇目标检测文章,时间跨度将近四分之一世纪.包括目标检测历史上的里程碑检测器.数据集.衡量指标.基本搭建模块.加速技术,最近的s ...
- AFM论文精读
深度学习在推荐系统的应用(二)中AFM的简单回顾 AFM模型(Attentional Factorization Machine) 模型原始论文 Attentional Factorization M ...
- Faster-RCNN论文精读
State-of-the-art object detection networks depend on region proposal algorithms to hypothesize objec ...
- 论文翻译——R-CNN(目标检测开山之作)
R-CNN论文翻译 <Rich feature hierarchies for accurate object detection and semantic segmentation> 用 ...
- 【DL论文精读笔记】 深度压缩
深度压缩 DEEP COMPRESSION: COMPRESSING DEEP NEURAL NETWORKS WITH PRUNING, TRAINED QUANTIZATION AND HUFFM ...
- 【DL论文精读笔记】Image Segmentation Using Deep Learning: A Survey 图像分割综述
深度学习图像分割综述 Image Segmentation Using Deep Learning: A Survey 原文连接:https://arxiv.org/pdf/2001.05566.pd ...
- DeepWalk论文精读:(3)实验
模块三 1 实验设计 1.1 数据集 BLOGCATALOG[39]:博客作者网络.标签为作者感兴趣的主题. FLICKR[39]:照片分享网站的用户网络.标签为用户的兴趣群组,如"黑白照片 ...
随机推荐
- TCP/IP协议(4): 地址解析协议(ARP) —— 网络地址转换为物理地址的方式
TCP/IP协议(4): 地址解析协议(ARP)--网络地址转换为物理地址的方式 关于地址解析协议(Address Resolution Protocol, ARP) 关于 ARP 地址解析协议(Ad ...
- vulnhub靶场之WORST WESTERN HOTEL: 1
准备: 攻击机:虚拟机kali.本机win10. 靶机:Worst Western Hotel: 1,下载地址:https://download.vulnhub.com/worstwesternhot ...
- I2C接口(续一)
I2C接口共涉及到18个寄存器,下面就来对它们进行具体分析. 先来看I2C配置寄存器CFG,下表是它的全部位结构,其地址分别为0x40050000(I2C0),0x40054000(I2C1),0x4 ...
- 一个厂区宿舍管理后台密码爆破 - selenium版
title: 某厂区宿舍管理后台密码爆破-selenium测试 author: 杨晓东 permalink: 某厂区宿舍管理后台密码爆破-selenium测试 date: 2021-10-02 11: ...
- 【1】部署环境python+pycharm+JDK+SDK+node安装+appium安装+Appium-python-client安装及配置+(模拟器)
安装SDK检查命令 adb doctor 安装JDK,SDK是为了手机端应用程序的访问去做的基础库的搭建 JDK,SDK环境变量需要在一块,不要一个上,一个下 JAVA_HOME Path 在一 ...
- Linux 磁盘扩容
原文链接:https://blog.csdn.net/zzq100zzq/article/details/125178843 一.查看系统磁盘1.使用df -hl ,查看系统的磁盘使用情况二.linu ...
- gcc 内联汇编简介
啊 啊 在内联汇编中,标识寄存器的一个%变成了两个% 啊 如图是内联汇编的模板 assembler template 是汇编代码 output operands TODO input operands ...
- CF1764G1 题解
题意 传送门 交互库有一个 \([1,n]\) 的排列 \(p\),你可以询问 \(l,r,k\),交互库会返回 \(\lfloor\dfrac{p_l}{k}\rfloor,\lfloor\dfra ...
- cuda+pytorch环境安装
本机cuda版本为v11.5 conda install cudatoolkit 使用 CUDA 11.3版本的配置 conda install pytorch==1.11.0 torchvision ...
- C++程序设计实验二 数组、指针与C++标准库
Info.hpp文件源码 #include<iostream> #include<string> #include<iomanip> using namespace ...