转载泡泡机器人——IMU预积分总结与公式推导2
本文为IMU预积分总结与公式推导系列技术报告的第二篇。
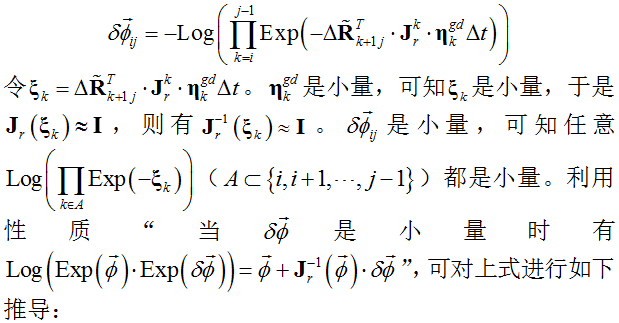
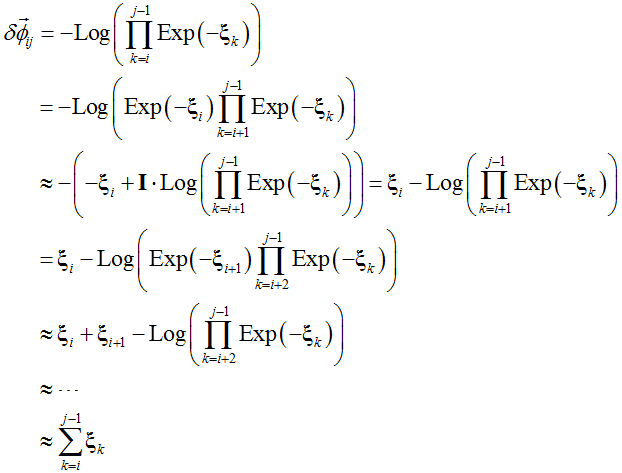
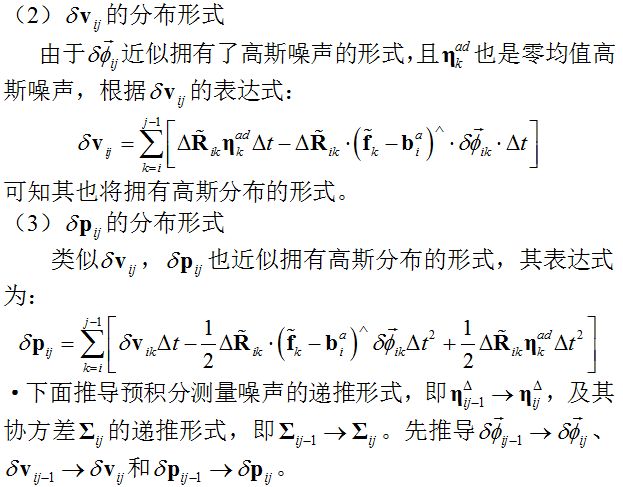
承接第一篇的内容,本篇将推导IMU预积分的测量值,并分析其测量误差的分布形式。
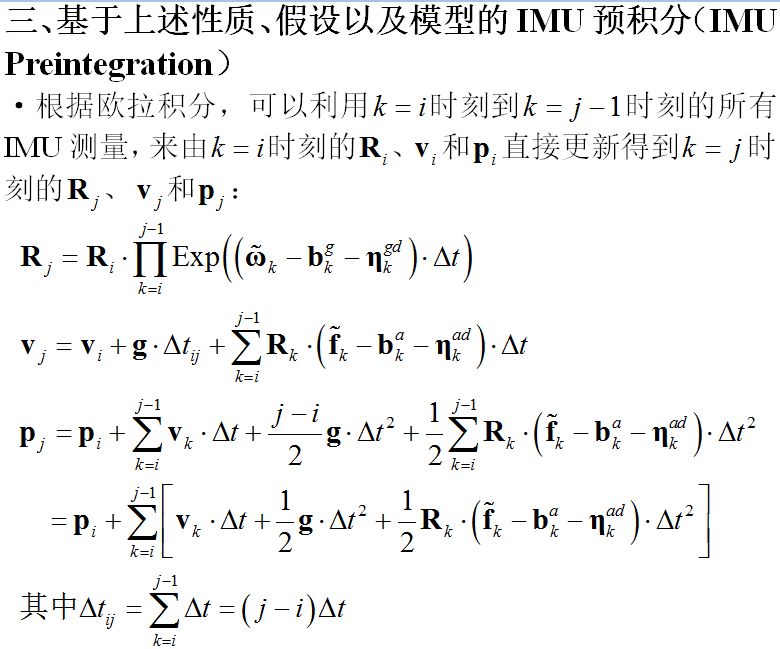
传统捷联惯性导航的递推算法,以初始状态为基础,利用IMU测量得到的比力和角速度信息进行积分运算,实时更新载体的位姿及速度等状态,回顾上一篇给出的运动模型,如果已知k时刻的载体状态Rk、vk和pk,则利用IMU测量值可以直接递推得到k+1时刻的载体状态,根据这种思路,如果知道上一帧图像采样时刻载体的位姿和速度,则可以递推得到当前帧的位姿和速度。需要注意的是,传统的惯导解算中非常重要的一个问题是处理重力,由于加计的测量特性,其测量值为包含反向重力的比力,而不是纯加速度。这使得一旦姿态不准确,重力投影误差将对速度和位置积分产生严重影响。
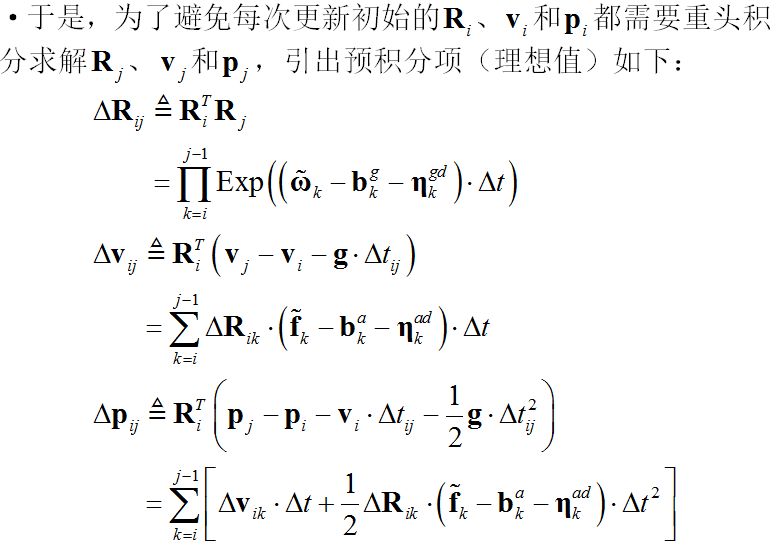
在基于BA的视觉惯性融合算法中,各个节点的载体状态都是有待优化的量。IMU预积分的初衷,是希望借鉴纯视觉SLAM中图优化的思想,将帧与帧之间IMU相对测量信息转换为约束节点(载体位姿)的边参与到优化框架中。IMU预积分理论最大的贡献是对这些IMU相对测量进行处理,使得它与绝对位姿解耦(或者只需要线性运算就可以进行校正),从而大大提高优化速度。另外,这种优化架构还使得加计测量中不受待见的重力变成一个有利条件——重力的存在将使整个系统对绝对姿态(指相对水平地理坐标系的俯仰角和横滚角,不包括真航向)可观。要知道纯视觉VO或者SLAM是完全无法得到绝对姿态的。
此外,由于传感器测量误差的存在,无论是纯惯导还是纯VO解算,单纯依靠递推运算不可避免的将带来累积误差(低精度IMU会极快发散)。将两种传感器融合可以利用冗余测量(例如两种方式都可以求取相对位姿)来抑制累积误差。同时,IMU和视觉这两种不同源的测量,也使得IMU的bias可观,从而可以在优化中被有效估计。另外老生常谈的纯单目视觉缺乏绝对尺度的问题,也可以由惯性信息的引入而得以解决。
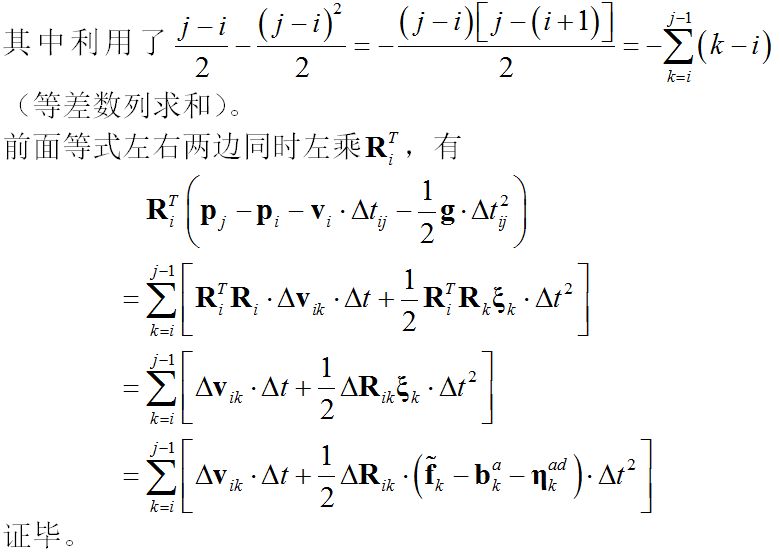
罗里吧嗦了一大堆,下面我们就来看看IMU预积分中是如何处理相对测量的。

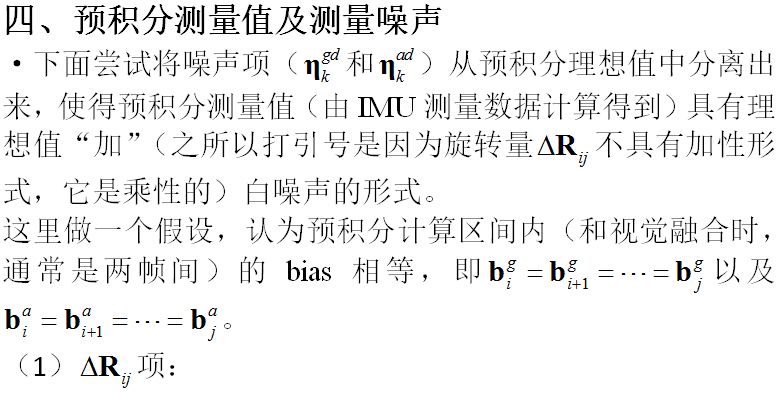


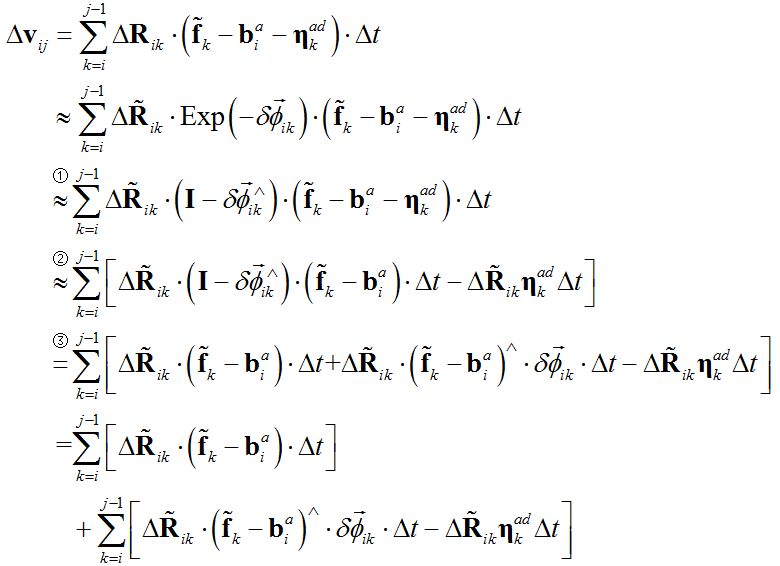
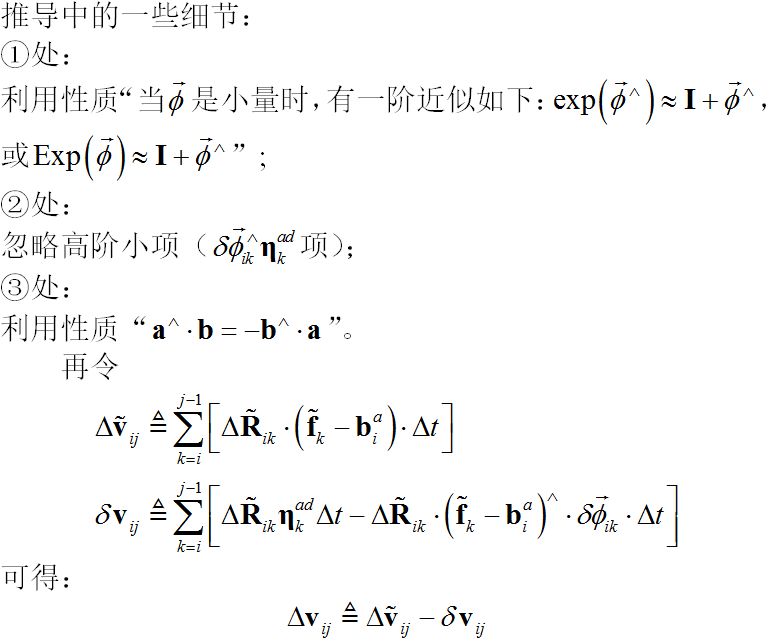

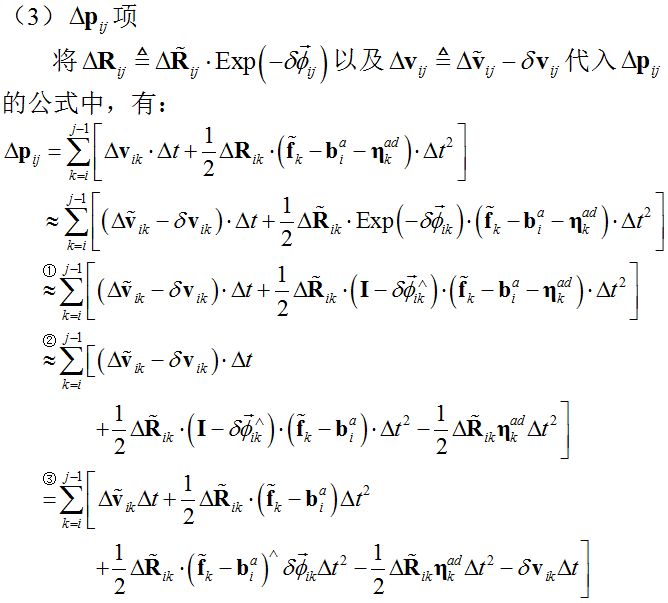

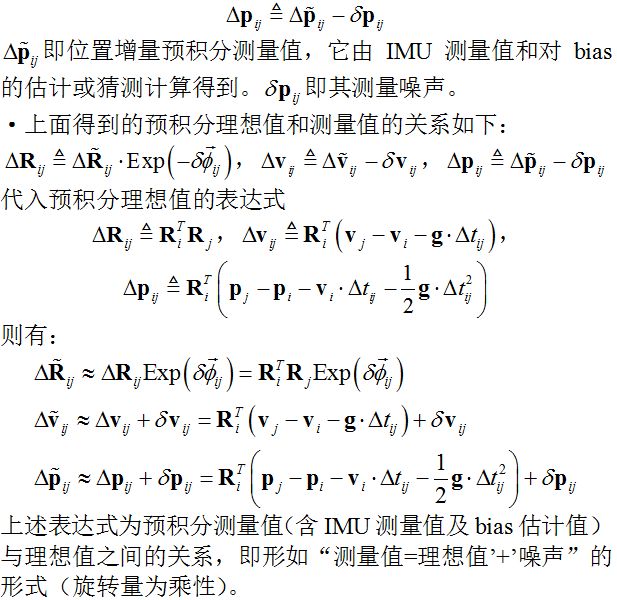
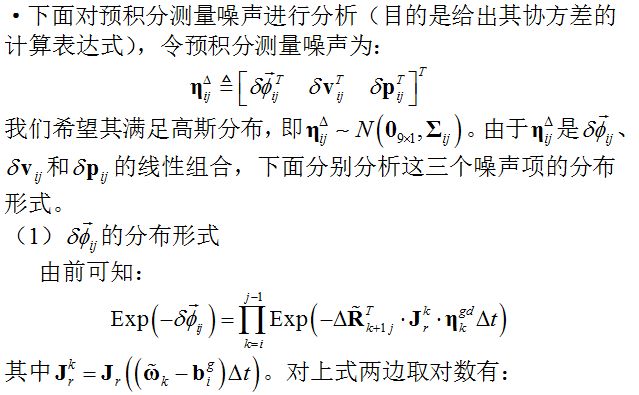


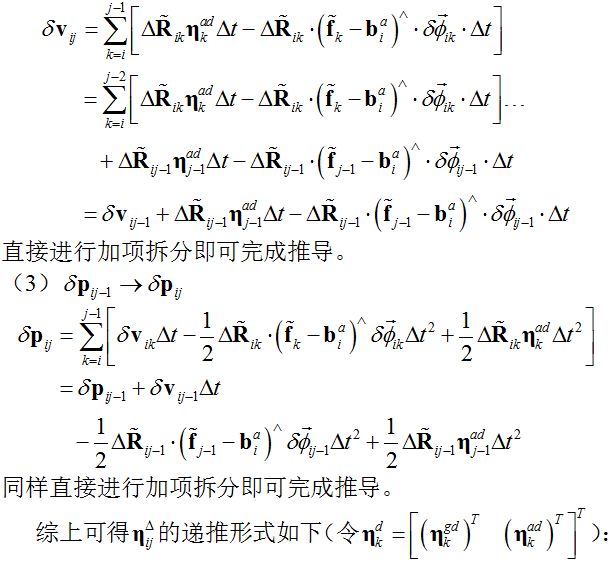
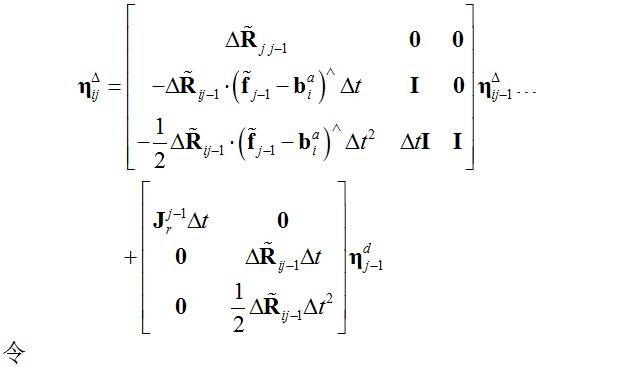
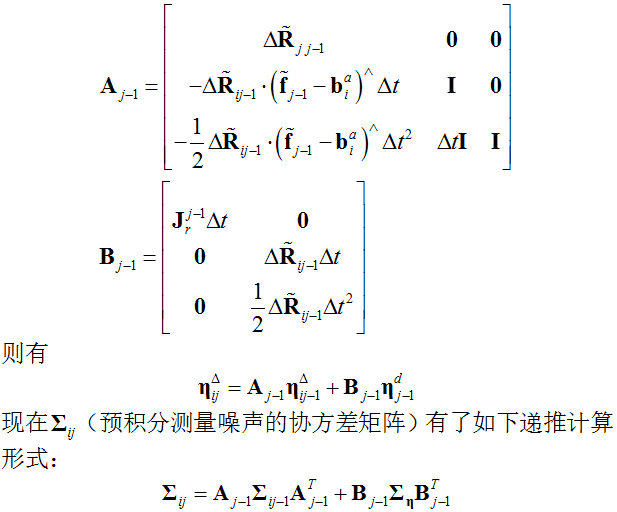
本篇对IMU预积分的理想模型及其噪声展开部分的公式进行了分析和推导。噪声分布将用来计算IMU预积分的信息矩阵,在优化框架中起到平衡权重的作用。
转载泡泡机器人——IMU预积分总结与公式推导2的更多相关文章
- 转载泡泡机器人——IMU预积分总结与公式推导1
IMU预积分技术最早由T Lupton于12年提出[1],C Forster于15年[2][3][4]将其进一步拓展到李代数上,形成了一套优雅的理论体系.Forster将IMU预积分在开源因子图优化库 ...
- IMU 预积分推导
给 StereoDSO 加 IMU,想直接用 OKVIS 的代码,但是有点看不懂.知乎上郑帆写的文章<四元数矩阵与 so(3) 左右雅可比>提到 OKVIS 的预积分是使用四元数,而预积分 ...
- VINS(七)estimator_node 数据对齐 imu预积分 vision
首先通过vins_estimator mode监听几个Topic(频率2000Hz),将imu数据,feature数据,raw_image数据(用于回环检测)通过各自的回调函数封装起来 ros::Su ...
- VINS(三)IMU预积分
IMU的数据频率一般远高于视觉,在视觉两帧k,k+1之间通常会有>10组IMU数据.IMU的数据通过积分,可以获取当前位姿(p位置,q四元数表达的姿态).瞬时速度等参数. 在VIO中,如果参考世 ...
- IMU预积分
https://www.sohu.com/a/242760307_715754 http://www.sohu.com/a/243155537_715754 https://www.sohu.com/ ...
- [转载]在线文档预览方案-Office Web Apps
最近在做项目时,要在手机端实现在线文档预览的功能.于是百度了一下实现方案,大致是将文档转换成pdf,然后在通过插件实现预览.这些方案没有具体实现代码,也没有在线预览的地址,再加上项目时间紧迫.只能考虑 ...
- 泡泡机器人SLAM 2019
LDSO:具有回环检测的直接稀疏里程计:LDSO:Direct Sparse Odometry with Loop Closure Abstract—In this paper we present ...
- 分享| 语义SLAM的未来与思考(泡泡机器人)
相比典型的点云地图,语义地图能够很好的表示出机器人到的地方是什么,机器人“看”到的东西是什么.比如进入到一个房间,点云地图中,机器人并不能识别显示出来的一块块的点云到底是什么,但是语义地图的构建可以分 ...
- 【转载】C/C++预处理器
转自:http://www.cnblogs.com/lidabo/archive/2012/08/27/2658909.html C/C++编译系统编译程序的过程为预处理.编译.链接.预处理器是在程序 ...
随机推荐
- 学了两天 react,乱讲一下学习思路,顺便弄了一个脚手架
之前一直用 vue 做一些小项目,最近接触了一个项目是用 react 做前端,虽然本身是做后端开发的,但是前端还是要了解一点的. 现在的项目基本上都是前后端分离的,后端就先不提了.前端的框架也是层出不 ...
- C# 以函数Action/Func/Task作为方法参数
以Action.Func.Task作为方法参数,mark一下 以Action为参数 public void TestAction() { //Action参数 ExecuteFunction(() = ...
- Error fetching https://gems.ruby-china.org/: bad response Not Found 404 (https://gems.ruby-china.org/specs.4.8.gz) 报错解决办法
执行换源操作 gem source -a https://gems.ruby-china.org/ 时报错: Error fetching https://gems.ruby-china.org/: ...
- 使用Python画玫瑰花
''' Created on Nov 18, 2017 @author: QiZhao ''' import turtle # 设置初始位置 turtle.penup() turtle.left(90 ...
- java的设计模式 - Builder模式
Builder 模式的目的? 构造对象的方式过于复杂,不如将之抽离出来.比如,构造器参数过多 这样说也有点抽象,举个例子吧. 举个例子 比如 非常热门的消息队列RabbitMQ 的 AMQP.Basi ...
- tablednd onDrap 方法不调用
场景 使用 tablednd 插件时,onDrap 方法不调用 解决 给tr标签加 id 属性
- Java中数组的插入,删除,扩张
Java中数组是不可变的,但是可以通过本地的arraycop来进行数组的插入,删除,扩张.实际上数组是没变的,只是把原来的数组拷贝到了另一个数组,看起来像是改变了. 语法: System.arrayc ...
- 【Android】用Cubism 2制作自己的Live2D——初探Live2D在Android上的运行!
前言- 上一次我们成功运行了官方给我们的样本,是不是很有干劲啊?!这次我们就来看看Live2D是怎么在手机上运行的! 准备- 上次运行成功的官方样本——第一次我们先看简单的,就是那个名字叫Sample ...
- 盖洛普Q12在团队中的应用
周五给大家做了个盖洛普Q12的分享. 分享前做了调查问卷.除了盖洛普Q12的12个问题: 1.我知道公司对我的工作要求吗? 2.我有做好我的工作所需要的材料和设备吗? 3.在工作中,我每天都有机会 ...
- mysql之limit使用
在mysql中,limit的使用方式如下: limit m,n --m:表示从哪一行开始查,n:查询多少条 需要明确的是,m表示取条数的起始位置,而n表示取多少条.例如我查询某个表,获取第一条数据,那 ...