OpenCV模板匹配算法详解
1 理论介绍
模板匹配是在一幅图像中寻找一个特定目标的方法之一,这种方法的原理非常简单,遍历图像中的每一个可能的位置,比较各处与模板是否“相似”,当相似度足够高时,就认为找到了我们的目标。OpenCV提供了6种模板匹配算法:
- 平方差匹配法CV_TM_SQDIFF
- 归一化平方差匹配法CV_TM_SQDIFF_NORMED
- 相关匹配法CV_TM_CCORR
- 归一化相关匹配法CV_TM_CCORR_NORMED
- 相关系数匹配法CV_TM_CCOEFF
- 归一化相关系数匹配法CV_TM_CCOEFF_NORMED
用T表示模板图像,I表示待匹配图像,切模板图像的宽为w高为h,用R表示匹配结果,匹配过程如下图所示:

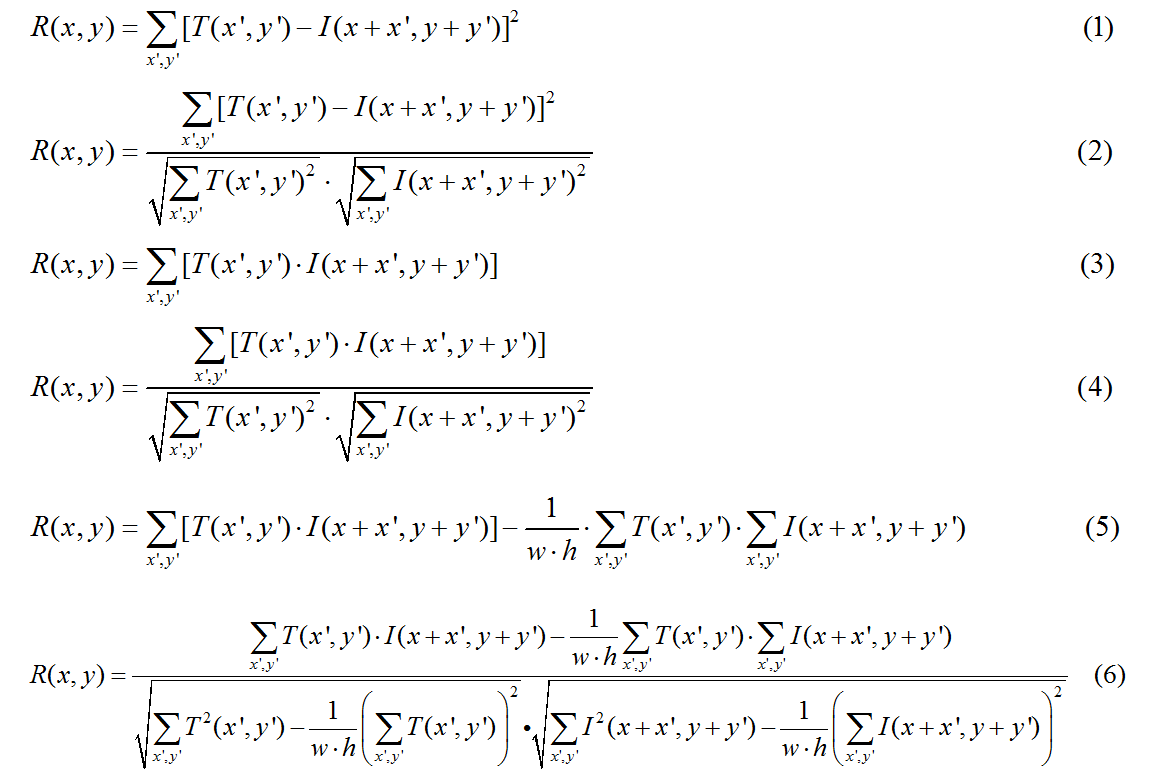
上述6中匹配方法可用以下公式进行描述:
2 示例代码
下面给出方法6的python代码
import numpy as np
import cv2 def EM(pModel, width, height):
sum = np.double(0.0)
for i in range(0,height):
for j in range(0,width):
sum += pModel[i][j]
return sum def EM2(pModel, width, height):
sum = np.double(0.0)
for i in range(0,height):
for j in range(0,width):
sum += pModel[i][j]*1.0*pModel[i][j]
return sum def EI(pToSearch, l, h, u, v, pModel, width, height):
sum = np.double(0.0)
roi = pToSearch[v:v+height, u:u+width]
for i in range(0,height):
for j in range(0,width):
sum += roi[i][j]
return sum def EI2(pToSearch, l, h, u, v, pModel, width, height):
sum = np.double(0.0)
roi = pToSearch[v:v+height, u:u+width]
for i in range(0,height):
for j in range(0,width):
sum += roi[i][j]*1.0*roi[i][j]
return sum def EIM(pToSearch, l, h, u, v, pModel, width, height):
sum = np.double(0.0)
roi = pToSearch[v:v+height, u:u+width]
for i in range(0,height):
for j in range(0,width):
sum += pModel[i][j]*1.0*roi[i][j]
return sum def Match(pToSearch, l, h, pModel, width, height):
uMax = l-width
vMax = h-height
N = width*height
len = (uMax+1)*(vMax+1)
MatchRec = [0.0 for x in range(0, len)]
k = 0 M = EM(pModel,width,height)
M2 = EM2(pModel,width,height)
for p in range(0, uMax+1):
for q in range(0, vMax+1):
I = EI(pToSearch,l,h,p,q,pModel,width,height)
I2 = EI2(pToSearch,l,h,p,q,pModel,width,height)
IM = EIM(pToSearch,l,h,p,q,pModel,width,height) numerator=(N*IM-I*M)*(N*IM-I*M)
denominator=(N*I2-I*I)*(N*M2-M*M) ret = numerator/denominator
MatchRec[k]=ret
k+=1 val = 0
k = 0
x = y = 0
for p in range(0, uMax+1):
for q in range(0, vMax+1):
if MatchRec[k] > val:
val = MatchRec[k]
x = p
y = q
k+=1
print "val: %f"%val
return (x, y) def main():
img = cv2.imread('niu.jpg', cv2.IMREAD_GRAYSCALE)
temp = cv2.imread('temp.png', cv2.IMREAD_GRAYSCALE) print temp.shape
imgHt, imgWd = img.shape
tempHt, tempWd = temp.shape
#print EM(temp, tempWd, tempHt)
(x, y) = Match(img, imgWd, imgHt, temp, tempWd, tempHt)
cv2.rectangle(img, (x, y), (x+tempWd, y+tempHt), (0,0,0), 2)
cv2.imshow("temp", temp)
cv2.imshow("result", img)
cv2.waitKey(0)
cv2.destroyAllWindows() if __name__ == '__main__':
main()
归一化相关系数匹配法
代码58行中的N就是公式(6)中的w*h,由于python代码运行速度比较慢,代码的58、59行相当于对公式(6)的分子分母都进行了平方操作,并且分子分母都乘以了N方,以减小计算量,所以代码61行的ret相当于公式(6)中的R(x,y)的平方,
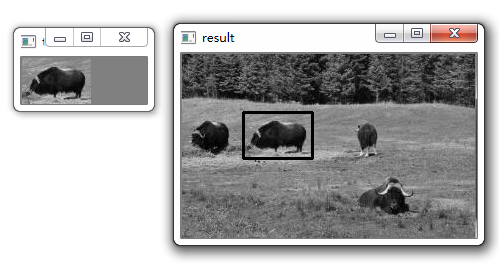
为了更快的进行算法验证,用上述代码进行验证时请尽量选用较小的匹配图像及模板图像,下图显示了我的匹配结果(待匹配图像295x184模板69x46用了十几分钟):
3 OpenCV源码
较新版本的OpenCV库中的模板匹配已经进行了较多的算法改进,直接看新版本中的算法需要了解很多相关理论知识,所以我们结合OpenCV0.9.5的源码进行讲解,该版本的源码基本上是C风格代码更容易进行理解(如果要对
OpenCV源码进行研究,建议用该版本进行入门),仍以归一化相关系数匹配法为例进行分析。
/*
* pImage: 待匹配图像
* image: 待匹配图像宽(width*depth并已4字节对齐)
* roiSize: 待匹配图像尺寸
* pTemplate: 模板图像
* templStep: 模板图像宽
* templSize: 模板图像尺寸
* pResult: 匹配结果
* resultStep: 匹配结果宽
* pBuffer: 中间结果数据缓存
*/
IPCVAPI_IMPL( CvStatus, icvMatchTemplate_CoeffNormed_32f_C1R,
(const float *pImage, int imageStep, CvSize roiSize,
const float *pTemplate, int templStep, CvSize templSize,
float *pResult, int resultStep, void *pBuffer) )
{
float *imgBuf = ; // 待匹配图像相关数据
float *templBuf = ; // 模板图像数据
double *sumBuf = ; // 待匹配图像遍历块单行和
double *sqsumBuf = ; // 待匹配图像遍历块单行平方和
double *resNum = ; // 模板图像和待匹配图像遍历块内积
double *resDenom = ; // 待匹配图像遍历块累加和及待匹配图像遍历块平方累加和
double templCoeff = ; // 模板图像均分差倒数
double templSum = ; // 模板图像累加和 int winLen = templSize.width * templSize.height;
double winCoeff = . / (winLen + DBL_EPSILON); // + DBL_EPSILON 加一个小整数防止分母为零 CvSize resultSize = cvSize( roiSize.width - templSize.width + ,
roiSize.height - templSize.height + );
int x, y; // 计算并为imgBuf、templBuf、sumBuf、sqsumBuf、resNum、resDenom分配存储空间
CvStatus result = icvMatchTemplateEntry( pImage, imageStep, roiSize,
pTemplate, templStep, templSize,
pResult, resultStep, pBuffer,
cv32f, , ,
(void **) &imgBuf, (void **) &templBuf,
(void **) &sumBuf, (void **) &sqsumBuf,
(void **) &resNum, (void **) &resDenom ); if( result != CV_OK )
return result; imageStep /= sizeof_float;
templStep /= sizeof_float;
resultStep /= sizeof_float; /* calc common statistics for template and image */
{
const float *rowPtr = (const float *) imgBuf;
double templSqsum = icvCrossCorr_32f_C1( templBuf, templBuf, winLen ); // 模板图像平方累加和 templSum = icvSumPixels_32f_C1( templBuf, winLen ); // 模板图像累加和
templCoeff = (double) templSqsum - ((double) templSum) * templSum * winCoeff; // 模板图像均方差的平方
templCoeff = icvInvSqrt64d( fabs( templCoeff ) + FLT_EPSILON ); // 模板图像均方差倒数 for( y = ; y < roiSize.height; y++, rowPtr += templSize.width )
{
sumBuf[y] = icvSumPixels_32f_C1( rowPtr, templSize.width ); // 待匹配图像按模板图像宽度求每行之和(遍历位置第一列)
sqsumBuf[y] = icvCrossCorr_32f_C1( rowPtr, rowPtr, templSize.width ); // 待匹配图像按模板图像宽度求每行平方之和(遍历位置第一列)
}
} /* main loop - through x coordinate of the result */
for( x = ; x < resultSize.width; x++ )
{
double sum = ;
double sqsum = ;
float *imgPtr = imgBuf + x; // 待匹配图像起始位置 /* update sums and image band buffer */ // 如果不是第1列需重新更新sumBuf,更新后sumBuf为遍历位置第x列每行之和(行宽为模板图像宽)
if( x > )
{
const float *src = pImage + x + templSize.width - ;
float *dst = imgPtr - ;
float out_val = dst[]; dst += templSize.width; for( y = ; y < roiSize.height; y++, src += imageStep, dst += templSize.width )
{
float in_val = src[]; sumBuf[y] += in_val - out_val;
sqsumBuf[y] += (in_val - out_val) * (in_val + out_val);
out_val = dst[];
dst[] = (float) in_val;
}
} for( y = ; y < templSize.height; y++ ) // 求遍历位置第x列,第1行处遍历块累加和sum及平方累加和sqsum
{
sum += sumBuf[y];
sqsum += sqsumBuf[y];
} for( y = ; y < resultSize.height; y++, imgPtr += templSize.width )
{
double res = icvCrossCorr_32f_C1( imgPtr, templBuf, winLen ); // 求模板图像和待匹配图像y行x列处遍历块的内积 if( y > ) // 如果不是第1行需更新遍历块累加和sum及平方累加和sqsum
{
sum -= sumBuf[y - ];
sum += sumBuf[y + templSize.height - ];
sqsum -= sqsumBuf[y - ];
sqsum += sqsumBuf[y + templSize.height - ];
}
resNum[y] = res;
resDenom[y] = sum;
resDenom[y + resultSize.height] = sqsum;
} for( y = ; y < resultSize.height; y++ )
{
double sum = ((double) resDenom[y]);
double wsum = winCoeff * sum;
double res = ((double) resNum[y]) - wsum * templSum;
double nrm_s = ((double) resDenom[y + resultSize.height]) - wsum * sum; res *= templCoeff * icvInvSqrt64d( fabs( nrm_s ) + FLT_EPSILON );
pResult[x + y * resultStep] = (float) res;
}
} return CV_OK;
}
以上代码是归一化相关系数法核心函数icvMatchTemplate_CoeffNormed_32f_C1R的源码,我已经在源码中进行了详细的注释,读者需自己再进行理解,需要进一步说明的是:
代码118行res就是计算公式(6)的分子部分,代码56行templCoeff就是计算公式(6)分母的左半部分,代码121行icvInvSqrt64d函数就是在计算公式(6)分母的右半部分,该行res的最终结果正是公式(6)中的R(x,y)。
4 结束语
OpenCV0.9.5源码下载:http://download.csdn.net/detail/weiwei22844/9547820
参考文章:http://blog.sina.com.cn/s/blog_4ae371970101aejw.html
http://blog.csdn.net/liyuanbhu/article/details/49837661
OpenCV模板匹配算法详解的更多相关文章
- 【转】Eclipse Java注释模板设置详解
Eclipse Java注释模板设置详解 设置注释模板的入口: Window->Preference->Java->Code Style->Code Template 然后 ...
- 【转载】 Eclipse注释模板设置详解
Eclipse注释模板设置详解 网站推荐: 金丝燕网(主要内容是 Java 相关) 木秀林网(主要内容是消息队列)
- tp6源码解析-第二天,ThinkPHP6编译模板流程详解,ThinkPHP6模板源码详解
TP6源码解析,ThinkPHP6模板编译流程详解 前言:刚开始写博客.如果觉得本篇文章对您有所帮助.点个赞再走也不迟 模板编译流程,大概是: 先获取到View类实例(依赖注入也好,通过助手函数也好) ...
- KMP字符串匹配算法详解
KMP算法利用匹配失败后的信息,尽量减少模式串与主串的匹配次数以达到快速匹配的目的.具体实现就是实现一个next()函数,函数本身包含了模式串的局部匹配信息.时间复杂度O(m+n). Next()函数 ...
- DotNetBar for Windows Forms 12.9.0.0_冰河之刃重打包版及制作Visual Studio C#项目模板文件详解
关于 DotNetBar for Windows Forms 12.9.0.0_冰河之刃重打包版 --------------------11.8.0.8_冰河之刃重打包版-------------- ...
- POJ 3164 Command Network(最小树形图模板题+详解)
http://poj.org/problem?id=3164 题意: 求最小树形图. 思路: 套模板. 引用一下来自大神博客的讲解:http://www.cnblogs.com/acjiumeng/p ...
- 【微信小程序】template模板使用详解
WXML提供模板(template),可以在模板中定义代码片段,然后在不同的地方调用. 模板的作用域: 模板拥有自己的作用域,只能使用 data 传入的数据以及模板定义文件中定义的 <wxs / ...
- 原生twig模板引擎详解(安装使用)
最近在学习SSTI(服务器模板注入),所以在此总结一下 0x00 Twig的介绍 什么是Twig? Twig是一款灵活.快速.安全的PHP模板引擎. Twig的特点? 快速:Twig将模板编译为纯粹的 ...
- Eclipse注释模板设置详解
设置注释模板的入口:Window->Preference->Java->Code Style->Code Template 然后展开Comments节点就是所有需设置注释的元素 ...
随机推荐
- 【Machine Learning】KNN算法虹膜图片识别
K-近邻算法虹膜图片识别实战 作者:白宁超 2017年1月3日18:26:33 摘要:随着机器学习和深度学习的热潮,各种图书层出不穷.然而多数是基础理论知识介绍,缺乏实现的深入理解.本系列文章是作者结 ...
- 理解CSS边框border
前面的话 边框是CSS盒模型属性中默默无闻的一个普通属性,CSS3的到来,但得边框属性重新焕发了光彩.本文将详细介绍CSS边框 基础样式 边框是一条以空格分隔的集合样式,包括边框粗细(边框宽度 ...
- 【原】Github+Hexo+NextT搭建个人博客
摘要 GitHub 是一个开源项目的托管网站,相信很多人都听过.在上面有很多高质量的项目代码,我们也可以把自己的项目代码托管到GitHub,与朋友们共享交流.GitHub Pages 是Github为 ...
- Node.js:OS模块
os模块,可以用来获取操作系统相关的信息和机器物理信息,例如操作系统平台,内核,cpu架构,内存,cpu,网卡等信息. 使用如下所示: const os = require('os'); var de ...
- C#调用C++代码遇到的问题总结
最近在开发服务后台的时候,使用c#调用了多个c++编写的dll,期间遇到了一系列的问题,经过一番努力最后都一一解决了,在此做个总结,方便以后参考,毕竟这些问题也都是很常见的,主要有以下问题: 类型对照 ...
- redis成长之路——(二)
redis操作封装 针对这些常用结构,StackExchange.Redis已经做了一些封装,不过在实际应用场景中还必须添加一些功能,例如重试等 所以对一些常功能做了一些自行封装SERedisOper ...
- BPM任务管理解决方案分享
一.方案概述任务是企业管理者很多意志的直接体现,对于非常规性事务较多的企业,经常存在各类公司下达的各种任务跟进难.监控难等问题,任务不是完成效果不理解,就是时间超期,甚至很多公司管理层下达的任务都不了 ...
- Jquery 获得当前标签的名称和标签属性
得到标签的名称 $("#name").prop("tagName"); 或者 $("#name")[0].tagName; 注意:1.得到的 ...
- windows 部署 git 服务器报 Please make sure you have the correct access rights and the repository exists.错误
这两天在阿里云上弄windows 服务器,顺便部署了一个git服务.根据网上教程一步步操作下来,最后在 remote远程仓库的时候提示 fatal: 'yourpath/test.git' does ...
- [BOT]自己动手实现android 饼状图,PieGraphView,附源码解析
本文要介绍的是一个参照手机支付宝app里面记账本功能里的"饼状图"实现的控件.通常app中可能的数据展示控件有柱状图,折线图,饼状图等,如果需要一个包含多种View控件的库,那么 ...