RT-Thread 时钟管理
一、时钟节拍
任何操作系统都需要提供一个时钟节拍,以供系统处理所有和时间有关的事件,如线程的延时、线程的时间片轮转调度以及定时器超时等。时钟节拍是特定的周期性中断,这个中断可以看做是系统心跳,中断之间的时间间隔取决于不同的应用,一般是 1ms–100ms,时钟节拍率越快,系统的实时响应越快,但是系统的额外开销就越大,从系统启动开始计数的时钟节拍数称为系统时间。
RT-Thread 中,时钟节拍的长度可以根据 RT_TICK_PER_SECOND 的定义来调整,等于 1/RT_TICK_PER_SECOND 秒。
实现方式
RT-Thread在board.c文件中实现了SysTick_Handler中断函数,在rt_hw_board_init()函数中设置了系统的时钟节拍,也就是1/RT_TICK_PER_SECOND 秒会发生一次中断。如下图所示:
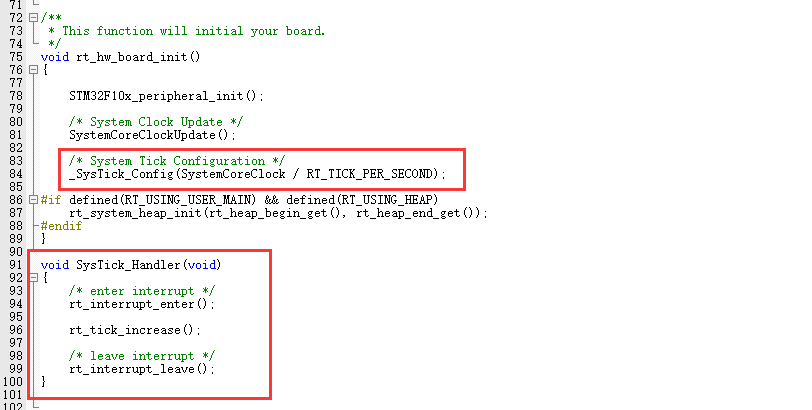
从图中可以,当中断函数发生时都会调用一次 rt_tick_increase() 对全局变量 rt_tick 进行自加,代码如下所示:
void rt_tick_increase(void)
{
struct rt_thread *thread; /* 全局变量 rt_tick 自加 */
++ rt_tick; /* 检查时间片 */
thread = rt_thread_self(); -- thread->remaining_tick;
if (thread->remaining_tick == 0)
{
/* 重新赋初值 */
thread->remaining_tick = thread->init_tick; /* 线程挂起 */
rt_thread_yield();
} /* 检查定时器 */
rt_timer_check();
}可以看到全局变量 rt_tick 在每经过一个时钟节拍时,值就会加 1,rt_tick 的值表示了系统从启动开始总共经过的时钟节拍数,即系统时间。此外,每经过一个时钟节拍时,都会检查当前线程的时间片是否用完,以及是否有定时器超时。
注意:中断中的 rt_timer_check() 用于检查系统硬件定时器链表,如果有定时器超时,将调用相应的超时函数。且所有定时器在定时超时后都会从定时器链表中被移除,而周期性定时器会在它再次启动时被加入定时器链表。
二、定时器管理
定时器分硬件定时器和软件定时器,RT-Thread 操作系统提供软件实现的定时器,以时钟节拍(OS Tick)的时间长度为单位,即定时数值必须是 OS Tick 的整数倍,例如一个 OS Tick 是 10ms,那么上层软件定时器只能是 10ms,20ms,100ms 等,而不能定时为 15ms。
- 定时器介绍
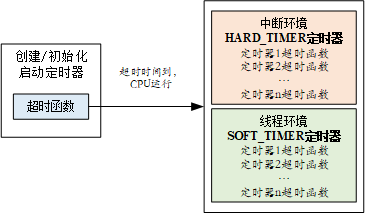
RT-Thread定时器提供两类定时器机制:一种是只会触发一次的定时器;另一种是周期性触发定时器。另外根据超时函数执行时所处的上下文环境,RT-Thread 的定时器可以分为 HARD_TIMER 模式与 SOFT_TIMER 模式,如下图。
HARD_TIMER 模式
1)HARD_TIMER 模式是在中断过程中执行,可以在初始化 / 创建定时器时使用参数 RT_TIMER_FLAG_HARD_TIMER 来指定。
2)在HARD_TIMER 模式中不能申请动态内存、释放动态内存等。
3)中断是优先级最好的抢占式服务,所以不能在HARD_TIMER 模式下的超时函数中执行长时间的占用操作。SOFT_TIMER 模式
1)通过宏定义 RT_USING_TIMER_SOFT 来决定是否启用该模式
2)SOFT_TIMER 模式的定时器超时函数在都会在 timer 线程的上下文环境中执行。
3)初始化 / 创建定时器时使用参数 RT_TIMER_FLAG_SOFT_TIMER 来指定设置 SOFT_TIMER 模式。
定时器工作机制
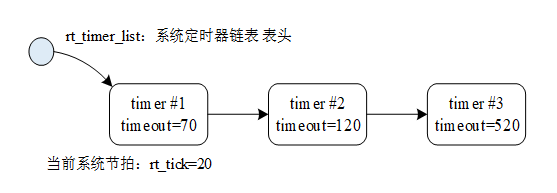
在 RT-Thread 定时器模块中维护着两个重要的全局变量:- 当前系统经过的 tick 时间 rt_tick(当硬件定时器中断来临时,它将加 1);
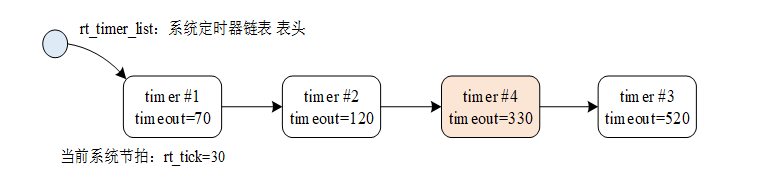
- 定时器链表 rt_timer_list。系统新创建并激活的定时器都会按照以超时时间排序的方式插入到 rt_timer_list 链表中。
注意:t_timer_list 链表是一个有序链表,当创建了一个新的tick值时,在链表中的添加如下图所示:
定时器跳表 (Skip List) 算法
如下图所示,从该有序链表中搜索元素 {13, 39},需要比较的次数分别为 {3, 5},总共比较的次数为 3 + 5 = 8 次。

使用跳表算法,把一些节点提取出来作为索引,得到如下图所示的结构。在这个结构里把 {3, 18,77} 提取出来作为一级索引,这样搜索的时候就可以减少比较次数了, 例如在搜索 39 时仅比较了 3 次(通过比较 3,18,39)。
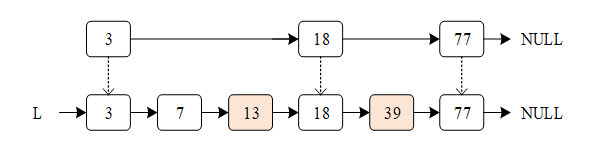
注意:跳表算法可以提取多级索引,在 RT-Thread 中通过宏定义 RT_TIMER_SKIP_LIST_LEVEL 来配置跳表的层数,默认为 1。
定时器控制快
RT-Thread 在 rtdef.h 文件中定义了结构体 struct rt_timer ,如下所示:struct rt_timer
{
struct rt_object parent;
rt_list_t row[RT_TIMER_SKIP_LIST_LEVEL]; /* 定时器链表节点 */ void (*timeout_func)(void *parameter); /* 定时器超时调用的函数 */
void *parameter; /* 超时函数的参数 */
rt_tick_t init_tick; /* 定时器初始超时节拍数 */
rt_tick_t timeout_tick; /* 定时器实际超时时的节拍数 */
};
typedef struct rt_timer *rt_timer_t;
三、定时器函数
在系统启动时,会在 rtthread_startup 函数中调用 rt_system_timer_init 函数和 rt_system_timer_thread_init 函数,如下所示:
// 初始化定时器管理系统
void rt_system_timer_init(void);
// 计时器线程初始化
void rt_system_timer_thread_init(void);
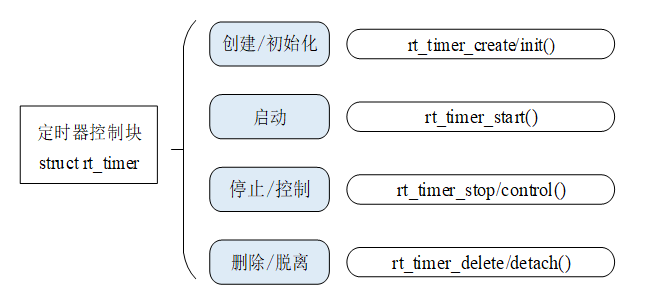
定时器的相关操作如下图所示:
获取时钟节拍
rt_tick_t rt_tick_get(void);
- rt_tick_t:返回当前时钟节拍值 rt_tick
动态创建定时器
rt_timer_t rt_timer_create(const char* name,
void (*timeout)(void* parameter),
void* parameter,
rt_tick_t time,
rt_uint8_t flag);
name:定时器的名称
void (timeout) (void parameter): 定时器超时函数指针(当定时器超时时,系统会调用这个函数)
parameter:定时器超时函数的入口参数(当定时器超时时,调用超时回调函数会把这个参数做为入口参数传递给超时函数)
time:定时器的超时时间,单位是时钟节拍
flag:定时器创建时的参数,支持的值包括单次定时、周期定时、硬件定时器、软件定时器等(可以用 “或” 关系取多个值)
rt_timer_t :RT_NULL:创建失败(通常会由于系统内存不够用而返回 RT_NULL)。创建成功是返回定时器的句柄
flag 的值在rtdef.h 中定义了相关的宏:
#define RT_TIMER_FLAG_ONE_SHOT 0x0 /* 单次定时 */
#define RT_TIMER_FLAG_PERIODIC 0x2 /* 周期定时 */ #define RT_TIMER_FLAG_HARD_TIMER 0x0 /* 硬件定时器 */
#define RT_TIMER_FLAG_SOFT_TIMER 0x4 /* 软件定时器 */
注意: 上面 2 组值可以以 “或” 逻辑的方式赋给 flag。
删除动态定时器
rt_err_t rt_timer_delete(rt_timer_t timer);
- timer:定时器句柄,指向要删除的定时器
- rt_err_t:RT_EOK:删除成功(如果参数 timer 句柄是一个 RT_NULL,将会导致一个 ASSERT 断言)
创建静态定时器
void rt_timer_init(rt_timer_t timer,
const char* name,
void (*timeout)(void* parameter),
void* parameter,
rt_tick_t time, rt_uint8_t flag);- timer:定时器句柄,指向要初始化的定时器控制块
- name:定时器的名称
- void (timeout) (void parameter):定时器超时函数指针(当定时器超时时,系统会调用这个函数)
- parameter:定时器超时函数的入口参数(当定时器超时时,调用超时回调函数会把这个参数做为入口参数传递给超时函数)
- time:定时器的超时时间,单位是时钟节拍
- flag:定时器创建时的参数,支持的值包括单次定时、周期定时、硬件定时器、软件定时器(可以用 “或” 关系取多个值),详见创建定时器小节
删除静态定时器
rt_err_t rt_timer_detach(rt_timer_t timer);
- timer:定时器句柄,指向要脱离的定时器控制块
- rt_err_t :RT_EOK:脱离成功
启动定时器
rt_err_t rt_timer_start(rt_timer_t timer);- timer:定时器句柄,指向要启动的定时器控制块
- rt_err_t :RT_EOK:启动成功
停止定时器
rt_err_t rt_timer_stop(rt_timer_t timer);- timer:定时器句柄,指向要启动的定时器控制块
- rt_err_t :RT_EOK:成功停止定时器,RT_ERROR:timer 已经处于停止状态
控制定时器
rt_err_t rt_timer_control(rt_timer_t timer, rt_uint8_t cmd, void* arg);- timer:定时器句柄,指向要启动的定时器控制块
- cmd :用于控制定时器的命令,当前支持四个命令,分别是设置定时时间,查看定时时间,设置单次触发,设置周期触发
- arg:与 cmd 相对应的控制命令参数 比如,cmd 为设定超时时间时,就可以将超时时间参数通过 arg 进行设定
- rt_err_t :RT_EOK:成功
- cmd 支持的命令:
#define RT_TIMER_CTRL_SET_TIME 0x0 /* 设置定时器超时时间 */
#define RT_TIMER_CTRL_GET_TIME 0x1 /* 获得定时器超时时间 */
#define RT_TIMER_CTRL_SET_ONESHOT 0x2 /* 设置定时器为单次定时器 */
#define RT_TIMER_CTRL_SET_PERIODIC 0x3 /* 设置定时器为周期型定时器 */
四、应用实例
动态定时器使用
#include "stm32f10x.h"
#include "drv_gpio.h"
#include "drv_usart.h"
#include <rtthread.h>
/* 定时器的控制块 */
static rt_timer_t timer1;
static rt_timer_t timer2;
static int cnt = 0;
/* 定时器 1 超时函数 */
static void timeout1(void *parameter)
{
rt_kprintf("periodic timer is timeout %d\n", cnt);
/* 运行第 10 次,停止周期定时器 */
if (cnt++>= 9)
{
rt_timer_stop(timer1);
rt_kprintf("periodic timer was stopped! \n");
}
}
/* 定时器 2 超时函数 */
static void timeout2(void *parameter)
{
rt_kprintf("one shot timer is timeout\n");
}
int timer_sample(void)
{
/* 创建定时器 1 周期定时器 */
timer1 = rt_timer_create("timer1", timeout1,
RT_NULL, 10,
RT_TIMER_FLAG_PERIODIC);
/* 启动定时器 1 */
if (timer1 != RT_NULL) rt_timer_start(timer1);
/* 创建定时器 2 单次定时器 */
timer2 = rt_timer_create("timer2", timeout2,
RT_NULL, 30,
RT_TIMER_FLAG_ONE_SHOT);
/* 启动定时器 2 */
if (timer2 != RT_NULL) rt_timer_start(timer2);
return 0;
}
int main(void)
{
rt_kprintf("RT-Thread Start...... \n");
timer_sample();
while (1)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
rt_thread_delay(1000); // 延时1000 ms
GPIO_SetBits(GPIOB, GPIO_Pin_12 );
rt_thread_delay(1000); // 延时1000 ms
}
}
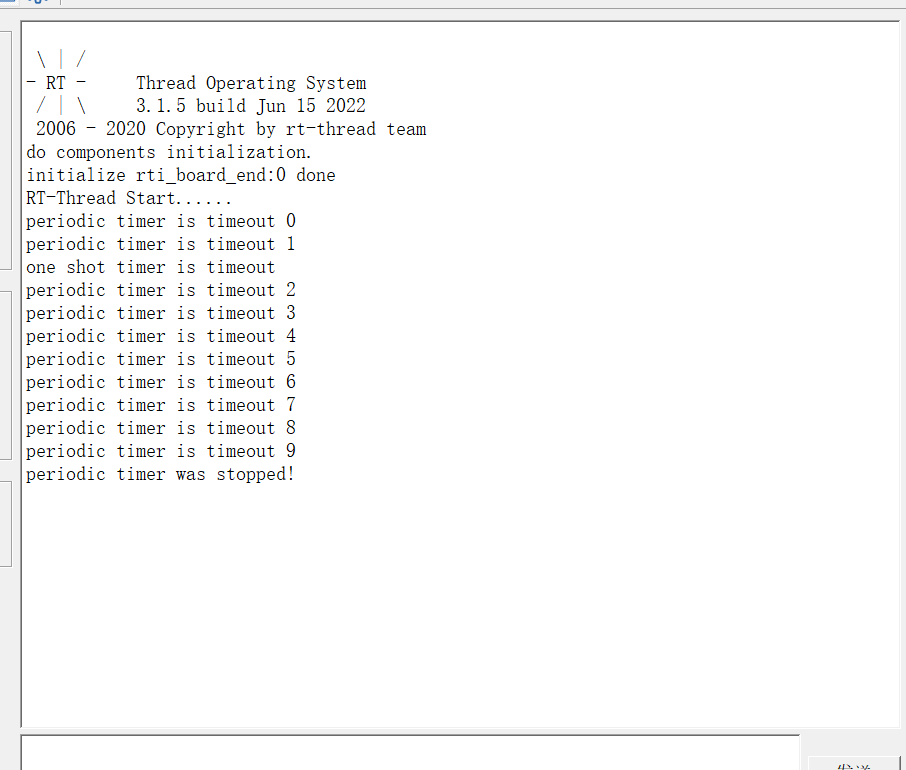
运行结果如下:
静态定时器使用
#include "stm32f10x.h"
#include "drv_gpio.h"
#include "drv_usart.h"
#include <rtthread.h>
/* 定时器的控制块 */
static struct rt_timer timer1;
static struct rt_timer timer2;
static int cnt = 0;
/* 定时器 1 超时函数 */
static void timeout1(void* parameter)
{
rt_kprintf("periodic timer is timeout\n");
/* 运行 10 次 */
if (cnt++>= 9)
{
rt_timer_stop(&timer1);
}
}
/* 定时器 2 超时函数 */
static void timeout2(void* parameter)
{
rt_kprintf("one shot timer is timeout\n");
}
int timer_static_sample(void)
{
/* 初始化定时器 */
rt_timer_init(&timer1, "timer1", /* 定时器名字是 timer1 */
timeout1, /* 超时时回调的处理函数 */
RT_NULL, /* 超时函数的入口参数 */
10, /* 定时长度,以 OS Tick 为单位,即 10 个 OS Tick */
RT_TIMER_FLAG_PERIODIC); /* 周期性定时器 */
rt_timer_init(&timer2, "timer2", /* 定时器名字是 timer2 */
timeout2, /* 超时时回调的处理函数 */
RT_NULL, /* 超时函数的入口参数 */
30, /* 定时长度为 30 个 OS Tick */
RT_TIMER_FLAG_ONE_SHOT); /* 单次定时器 */
/* 启动定时器 */
rt_timer_start(&timer1);
rt_timer_start(&timer2);
return 0;
}
int main(void)
{
rt_kprintf("RT-Thread Start...... \n");
timer_static_sample();
while (1)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
rt_thread_delay(1000); // 延时1000 ms
GPIO_SetBits(GPIOB, GPIO_Pin_12 );
rt_thread_delay(1000); // 延时1000 ms
}
}
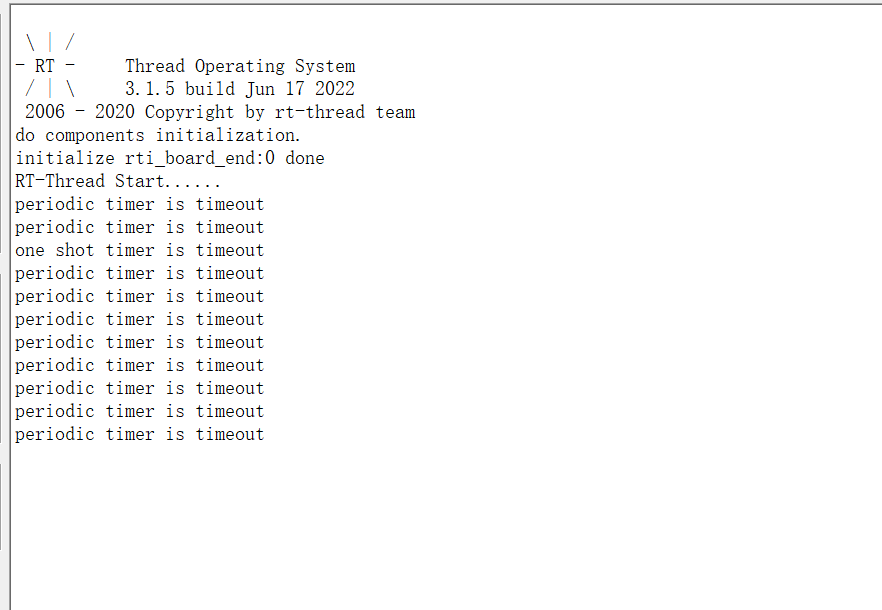
运行结果如下:
参考文献
RT-Thread文档中心:https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/README
RT-Thread 时钟管理的更多相关文章
- RT Thread 通过ENV来配置SFUD,操作SPI Flash
本实验基于正点原子stm32f4探索者板子 请移步我的RT Thread论坛帖子. https://www.rt-thread.org/qa/forum.php?mod=viewthread& ...
- Linux的时钟管理
本文转自博客园zhenwenxian的Linux时间管理,很详细,写得很不错,对初学者还是有很大帮助的. 时间管理在内核中占有非常重要的地位.相对于事件驱动,内核中有大量的函数都是基于时间驱动的.内核 ...
- STM32 + RT Thread OS 学习笔记[二]
串口通讯例程 通过上面的练习,对STM32项目开发有了一个直观印象,接下来尝试对串口RS232进行操作. 1. 目标需求: 开机打开串口1,侦听上位机(使用电脑串口测试软件)发送的信息,然后原样输 ...
- Android中关于项目中对Thread的管理(不是线程池)
背景 项目中对于一些并不复杂的耗时操作,比如计算,不频繁操作数据库等,因为没必要使用线程池,所以之前项目会直接使用new Thread的方式,时间一长,回头再看,原来new Thread之处已经很多了 ...
- RT thread 设备驱动组件之USART设备
本文以stm32f4xx平台介绍串口驱动,主要目的是:1.RTT中如何编写中断处理程序:2.如何编写RTT设备驱动接口代码:3.了解串行设备的常见处理机制.所涉及的主要源码文件有:驱动框架文件(usa ...
- STM32 + RT Thread OS 串口通讯
1. 创建项目 a) 禁用Finsh和console b) 默认情况下,项目文件包含了finsh,它使用COM1来通讯,另外,console输出(rt_kprintf)也使用了COM1.因 ...
- linux时钟管理
ref https://access.redhat.com/solutions/18627 在el5中 如何查看系统现在使用的clock source是什么? 答: 方式1:需要说明的是不能保证这个两 ...
- linux目录管理、时钟管理、文件查看命令
inux的两种时钟: 系统时钟:由Linux内核通过CPU的工作频率进行的计时: 硬件时钟: hwclock: 显示硬件时钟 -s, --hctosys -w, --systohc cal:日历 目录 ...
- RTT之时钟管理
时钟节拍 :等于 1/T_TICK_PER_SECOND 秒,用 SysTick_Handler实现,在每次加1时都会检查当前线程的时间片是否用完,以及是否有定时器超时.定时值应该为该值的整数倍.非整 ...
- STM32 + RT Thread OS 学习笔记[三]
RTGUI 据说RTGUI是多线程的,因此与RT-Thread OS的耦合度较高,有可能要访问RT-Thread的线程控制块.如果要移植到其它OS,估计难度较大.目前还处于Alpha状态,最终将会包含 ...
随机推荐
- KingbaseES V8R6集群运维案例之---sys_rewind应用分析
案例说明: sys_rewind是用于在数据库cluster的时间线分叉以后,同步一个 KingbaseES 数据库cluster 和同一数据库cluster另一份拷贝的工具.一种典型的场景是在失 ...
- 强烈推荐:2024 年12款 Visual Studio 亲测、好用、优秀的工具,AI插件等
工具类扩展 1. ILSpy 2022 (免费) ILSpy 是 ILSpy 开源反编译器的 Visual Studio 扩展. 是一款开源.免费的.且适用于.NET平台反编译[C#语言编写的程序和库 ...
- 稀疏镜像在OpenHarmony上的应用
一.稀疏镜像升级背景 常用系统镜像格式为原始镜像,即RAW格式.镜像体积比较大,在烧录固件或者升级固件时比较耗时,而且在移动设备升级过程时比较耗费流量.为此,将原始镜像用稀疏描述,可以大大地缩减镜像体 ...
- VS2019快捷键
快捷键功能CTRL + SHIFT + B生成解决方案CTRL + F7 生成编译CTRL + O 打开文件CTRL + SHIFT + O打开项目CTRL + SHIFT + C显示类视图窗口F4 ...
- centos部署Django二:项目上传及测试
1. 上传项目 用 ftp 或者 sftp 上传项目到服务器. *:如果上传时,报各种错误,可以考虑下是不是服务器中文件夹权限的问题.如果是权限的问题,可以使用命令修改文件夹权限后在上传:chmod ...
- Web Audio API 第4章 音调与频域
音调与频域 此章中如果对音乐部分不感兴趣,可忽略 代码部分也没有更多的新 api ,重要的还是相关的物理与声音的相关知识 到目前为止我们已经学过了声音的基础属性:定时与音量.为了能处理更复杂的的情况, ...
- .NET MAUI开源免费的UI工具包 - Uranium
前言 一直有小伙伴在微信公众号后台留言让我分享一下.NET MAUI相关的UI框架,今天大姚分享一个.NET MAUI开源.免费的UI工具包:Uranium. Uranium介绍 Uranium是一个 ...
- Linux之bond和team
一.bond 和 team 区别 bond只能是双网卡绑定,team不需要手动加载相应内核模块和有更强的拓展性,最高可以绑定8块网卡. 二.模式 bond模式 (1)mode=0(balance-rr ...
- 基于tapd的git commit规范
现状 开发团队中,总是有人提交代码时的commit内容乱写一通,或者不明确不完整.当回溯代码的时候,很难通过commit内容定位历史记录,只能一条一条查看,找不到就要去问历史参与开发的其他同事,沟通成 ...
- seo FAQ 科普
前言 seo 常规问题整理,后续不断补充,只做科普. 正文 1.什么是seo: seo 也就是搜索排名. 2.百度,360等知名品牌如何排名: 抓取,过滤,建立索引,输出结果 3.是否网站越好看排名就 ...