PID控制算法的C语言实现二 PID算法的离散化
上一节中,我论述了PID算法的基本形式,并对其控制过程的实现有了一个简要的说明,通过上一节的总结,基本已经可以明白PID控制的过程。这一节中先继续上一节内容补充说明一下。
1.说明一下反馈控制的原理,通过上一节的框图不难看出,PID控制其实是对偏差的控制过程;
2.如果偏差为0,则比例环节不起作用,只有存在偏差时,比例环节才起作用。
3.积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差。
4.而微分信号则反应了偏差信号的变化规律,或者说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的快速性。
好了,关于PID的基本说明就补充到这里,下面将对PID连续系统离散化,从而方便在处理器上实现。下面把连续状态的公式再贴一下:

假设采样间隔为T,则在第K T时刻:
偏差err(K)=rin(K)-rout(K);
积分环节用加和的形式表示,即err(K)+err(K+1)+„„;
微分环节用斜率的形式表示,即[err(K)-err(K-1)]/T;
从而形成如下PID离散表示形式:

至于说Kp、Ki、Kd三个参数的具体表达式,我想可以轻松的推出了,这里节省时间,不再详细表示了。
其实到这里为止,PID的基本离散表示形式已经出来了。目前的这种表述形式属于位置型PID,另外一种表述方式为增量式PID,由U上述表达式可以轻易得到:
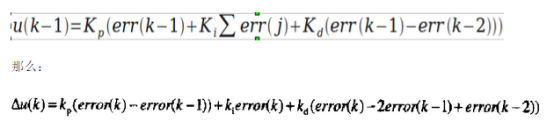
这就是离散化PID的增量式表示方式,由公式可以看出,增量式的表达结果和最近三次的偏差有关,这样就大大提高了系统的稳定性。需要注意的是最终的输出结果应该为
u(K)+增量调节值;
PID的离散化过程基本思路就是这样,下面是将离散化的公式转换成为C语言,从而实现微控制器的控制作用。
PID控制算法的C语言实现二 PID算法的离散化的更多相关文章
- PID控制算法的C语言实现十一 模糊算法简介
在PID控制算法的C语言实现九中,文章已经对模糊PID的实质做了一个简要说明.本来打算等到完成毕业设计,工作稳定了再着力完成剩下的部分.鉴于网友的要求和信任,抽出时间来,对模糊PID做一个较为详细的论 ...
- PID控制算法的C语言实现一 PID算法原理
本系列是转载............. 全部的程序有一个共同点:就是我没认真去调pid的参数 在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设 ...
- PID控制算法的C语言实现
参考: PID控制器开发笔 浅谈位置式PID 专家PID控制在快速系统中的仿真及应用(这篇了论文介绍的积分分离PID.专家PID(脚本实现和simulink实现)很详细) PID控制算法的C语言实现一 ...
- PID控制算法的C语言实现十 专家PID与模糊PID的C语言实现
本节是PID控制算法的C语言实现系列的最后一节,前面8节中,已经分别从PID的实现到深入的过程进行了一个简要的讲解,从前面的讲解中不难看出,PID的控制思想非常简单,其主要问题点和难点在于比例.积分. ...
- PID控制算法的C语言实现九
(1)微分先行PID控制算法 微分先行PID控制的特点是只对输出量yout(k)进行微分,而对给定值rin(k)不进行微分.这样,在改变给定值时,输出不会改变,而被控量的变化通常是比较缓和的.这种输出 ...
- PID控制算法的C语言实现八 变积分的PID控制算法C语言实现
变积分PID可以看成是积分分离的PID算法的更一般的形式.在普通的PID控制算法中,由于积分系数ki是常数,所以在整个控制过程中,积分增量是不变的.但是,系统对于积分项的要求是,系统偏差大时,积分作用 ...
- PID控制算法的C语言实现六 抗积分饱和的PID控制算法C语言实现
所谓的积分饱和现象是指如果系统存在一个方向的偏差,PID控制器的输出由于积分作用的不断累加而加大,从而导致执行机构达到极限位置,若控制器输出U(k)继续增大,执行器开度不可能再增大,此时计算机输出控制 ...
- PID控制算法的C语言实现四 增量型PID的C语言实现
/*------------------------------------------- 2 位置型PID C实现(控制电机转速) --------------------------------- ...
- PID控制算法的c语言实现十二 模糊PID的参数整定
这几天一直在考虑如何能够把这一节的内容说清楚,对于PID而言应用并没有多大难度,按照基本的算法设计思路和成熟的参数整定方法,就算是没有经过特殊训练和培训的人,也能够在较短的时间内容学会使用PID算法. ...
随机推荐
- redis 为什么快
redis采用自己实现的事件分离器,效率比较高,内部采用非阻塞的执行方式,吞吐能力比较大. 不过,因为一般的内存操作都是简单存取操作,线程占用时间相对较短,主要问题在io上,因此,redis这种模型是 ...
- CSS 实用实例
背景颜色 1. 颜色背景 <style type="text/css">body { font-size: 16px;">h1 { font-size: ...
- How to pass an Amazon account review
Have you ever sold products on Amazon? How about sold so much within the first week that amazon deci ...
- 深入react技术栈解读
1. react实现virtual DOM ,如果要改变页面的内容,还是需要执行DOM操作,比原生操作DOM多了virtualDOM的操作(计算,对比等), 应该是更耗性能??? 2. react特点 ...
- Codeforces Round #765 Div.1 F. Souvenirs 线段树
题目链接:http://codeforces.com/contest/765/problem/F 题意概述: 给出一个序列,若干组询问,问给出下标区间中两数作差的最小绝对值. 分析: 这个题揭示着数据 ...
- Java变量声明,实例化,问题
1.变量在输出前必须实例化,这是因为只有声明,没有分配内存空间 在这种情况下会报错 2.实例化后,尽管没有赋值,可能是默认了吧,但也不会输出null,什么也没有输出 上面的理解可能是错的,a赋值了,就 ...
- "感应锁屏"Alpha版使用说明
“感应锁屏”Alpha版使用说明 一.产品介绍 感应锁屏是锁屏软件的一大创新.相比传统的锁屏软件,“感应锁屏”从可操作性.方便性.功能全面性都有了很大的提升,可以让用户方便快捷的进行锁屏操作. “感应 ...
- 严重: Failed to destroy end point associated with ProtocolHandler ["http-nio-8080"] java.lang.NullPointer
刚接触servlet类,按照课本的方法使用eclipse新建了一个servlet类. 新建完成后,在web.xml里面进行注册 这时候就会报错了. 五月 07, 2016 11:23:28 上午 or ...
- PXE Centos7和Centos6
外网网卡:192.168.23.10, 内网网卡:192.168.10.2 PXE(preboot execute environment,预引导执行环境)是由Intel公司开发的最新技术,工作于Cl ...
- Matlab中TCP通讯-实现外部程序提供优化目标函数解
版权声明:若无来源注明,Techie亮博客文章均为原创. 转载请以链接形式标明本文标题和地址: 本文标题:Matlab中TCP通讯-实现外部程序提供优化目标函数解 本文地址:http://te ...