STM32串口USART1的使用方法
前言:
通用同步异步收发器(USART)提供了一种灵活的方法来与使用工业标准NR 异步串行数据格式的外部设备之间进行全双工数据交换。 USART利用分数波特率发生器提供宽范围的 波特率选择,支持同步单向通信和半双工单线通信。
1、STM32固件库使用外围设备的主要思路
在STM32中,外围设备的配置思路比较固定。首先是使能相关的时钟,一方面是设备本身的时钟,另一方面如果设备通过IO口输出还需要使能IO口的时钟;最后如果对应的IO口是复用功能的IO口,则还必须使能AFIO的时钟。
其次是配置GPIO,GPIO的各种属性由硬件手册的AFIO一章详细规定,较为简单。
接着相关设备需要如果需要使用中断功能,必须先配置中断优先级,后文详述。
然后是配置外围设备的相关属性,视具体设备而定,如果设备需要使用中断方式,必须使能相应设备的中断,之后需要使能相关设备。
最后如果设备使用了中断功能,则还需要填写相应的中断服务程序,在服务程序中进行相应操作。
2、UART的配置步骤(查询方式)
2.1、打开时钟
由于UART的TX和RX和AFIO都挂在APB2桥上,因此采用固件库函数RCC_APB2PeriphClockCmd()进行初始化。UARTx需要分情况讨论,如果是UART1,则挂在APB2桥上,因此采用RCC_APB2PeriphClockCmd()进行初始化,其余的UART2~5均挂在APB1上。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
2.2、GPIO初始化
GPIO的属性包含在结构体GPIO_InitTypeDef,其中对于TX引脚,GPIO_Mode字段设置为GPIO_Mode_AF_PP(复用推挽输出),GPIO_Speed切换速率设置为GPIO_Speed_50MHz;对于RX引脚,GPIO_Mode字段设置为GPIO_Mode_IN_FLOATING(浮空输入),不需要设置切换速率。最后通过GPIO_Init()使能IO口。
以下是GPIO设置的实例代码:

GPIO_InitTypeDef GPIO_InitStructure;
//USART1 Tx(PA.09)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1 Rx(PA.10)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
2.3、配置UART相关属性
通过结构体USART_InitTypeDef来确定。UART模式下的字段如下
USART_BaudRate:波特率,视具体设备而定
USART_WordLength:字长
USART_StopBits:停止位
USART_Parity:校验方式
USART_HardwareFlowControl:硬件流控制
USART_Mode:单/双工
最后设置。实例代码为:
//USART1配置
USART_InitTypeDef USART_InitStructure; USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
别忘了最后要使用USART_Cmd()来启动设备UART1。
2.4、重定向print()函数。
int fputc(int ch,FILE *f)
{
USART1->SR; //USART_GetFlagStatus(USART1, USART_FLAG_TC) 解决第一个字符发送失败的问题
//一个一个发送字符
USART_SendData(USART1, (unsigned char) ch);
//等待发送完成
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET); return(ch);
}
最后通过主函数直接输出即可。
int main(void)
{
// USART1 config 9600 8-N-1
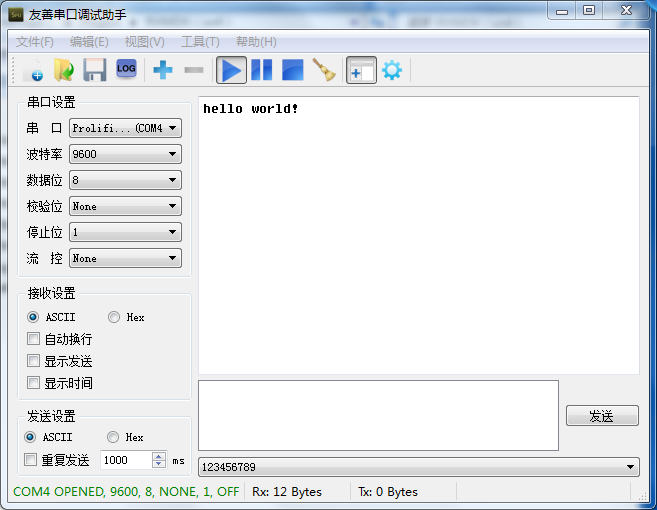
USART1_Config(); printf("hello world!");
}
3、UART的配置步骤(中断方式)
打开时钟、GPIO初始化、配置UART相关属性、重定向print()函数 与上面的相同。
3.1、中断优先级的配置
这是STM32比较奇怪的地方,在只有一个中断的情况下,仍然需要配置优先级,其作用是使能某条中断的触发通道。STM32的中断有至多两个层次,分别是先占优先级和从优先级,而整个优先级设置参数的长度为4位,因此需要首先划分先占优先级位数和从优先级位数,通过NVIC_PriorityGroupConfig()实现;
特定设备的中断优先级NVIC的属性包含在结构体NVIC_InitTypeDef中,其中字段NVIC_IRQChannel包含了设备的中断向量,保存在启动代码中;字段NVIC_IRQChannelPreemptionPriority为主优先级,NVIC_IRQChannelSubPriority为从优先级,取值的范围应根据位数划分的情况而定;最后NVIC_IRQChannelCmd字段是是否使能,一般定位ENABLE。最后通过NVIC_Init()来使能这一中断向量。实例代码如下:
//配置UART1接收中断
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); /* Enable the USARTy Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
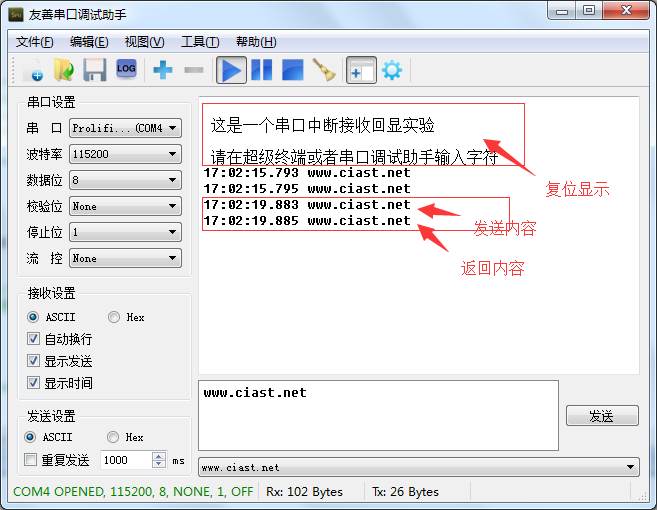
3.2、中断的服务程序的设计
目前使用了UART的两个中断USART_IT_RXNE(接收缓存补空中断)和USART_IT_TXE(发送缓存空中断),前一个中断保证了一旦有数据接收到就进入中断以接收特定长度的数据,后一个中断表示一旦发完一个数据就进入中断函数,保证连续发送一段数据。一个设备的所有中断都包含在一个中断服务程序中,因此必须首先分清楚这次响应的是哪一个中断,使用USART_GetITStatus()函数确定;采用USART_ReceiveData()函数接收一个字节数据,采用USART_SendData()函数发送一个字节数据,当关闭中断时采用USART_ITConfig()失能响应的中断。实例程序:
void USART1_IRQHandler(void)
{
uint8_t ch; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
//ch = USART1->DR;
ch = USART_ReceiveData(USART1); //接受数据
printf( "%c", ch ); //返回打印
} }
3.3、接收数据函数:
//重定向scanf函数到USART1
int fgetc(FILE *f)
{
/*等待串口1输入数据*/
while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET); return (int)USART_ReceiveData(USART1);
}
STM32串口USART1的使用方法的更多相关文章
- STM32串口USART1的使用方法和程序
通用同步异步收发器(USART)提供了一种灵活的方法来与使用工业标准NR 异步串行数据格式的外部设备之间进行全双工数据交换. USART利用分数波特率发生器提供宽范围的波特率选择,支持同步单向通信和半 ...
- STM32串口USART的使用方法和程序
通用同步异步收发器(USART)提供了一种灵活的方法来与使用工业标准NR 异步串行数据格式的外部设备之间进行全双工数据交换. USART利用分数波特率发生器提供宽范围的波特率选择,支持同步单向通信和半 ...
- STM32串口DMA超时接收方法,可大大节约CPU时间
//超时时间定义#define UART1_TimeoutComp 2 //20ms#define UART2_TimeoutComp 10 //100ms#defin ...
- STM32串口通信配置(USART1+USART2+USART3+UART4) (转)
一.串口一的配置(初始化+中断配置+中断接收函数) 1 /*====================================================================== ...
- stm32串口之存储与解析
最近在做一个小项目,需要用stm32串口接受Arduino发送的一个不定长的数据,并且解析数据,执行其中的命令:秉着不在中断中做过多任务的思想,我们将从串口中接受到的字符放到一个数组当中. 定义数组 ...
- Stm32串口通信(USART)
Stm32串口通信(UART) 串口通信的分类 串口通信三种传递方式 串口通信的通信方式 串行通信的方式: 异步通信:它用一个起始位表示字符的开始,用停止位表示字符的结束.其每帧的格式如下: 在一帧格 ...
- stm32串口通信实验,一点笔记
第一次深入学习stm32,花了好长时间才看懂代码(主要是C语言学习不够深入),又花了段时间自己敲了一遍,然后比对教程,了解了利用中断来串口通信的设置方法. 板子是探索版f407,本实验工程把正点原子库 ...
- STM32串口发送第一个字符丢失解决之道
stm32用printf函数重定向到串口USART1发现第一个字符没打印出来具体如下: 刚开始修改fputc函数如下: int fputc(int ch,FILE *f){USART_SendData ...
- STM32串口遇到的一个问题
做HLW8032电能表项目中关于USART使用DMA接收定长数据的问题 1:由于HLW8032芯片一上电,芯片就会通过串口每隔50ms向STM32发送24字节的数据,且我不能通过STM32控制HLW8 ...
随机推荐
- ASP.NET Core身份识别
Introduction to Identity 66 of 93 people found this helpful By Pranav Rastogi, Rick Anderson, Tom Dy ...
- GitHub学习资料
GitHub账户注册注册了有一年多了(Joined on 13 Apr 2015),一直以来都是本地命令行上传到内网的Git服务器Gitlab.最近正好在学习新的编程语言,所以当初荒废的GitHub想 ...
- WCF学习
WCF初探-1:认识WCF MQ与Webservice的区别 Webservice 和MQ(MessageQueue)都是解决跨平台通信的常用手段,两者有哪些区别呢? 个人认为最本质的区别在于 Web ...
- input覆盖select实现select可写可选择
1.有时需要一个select选择框,但是对select选择框希望是既可以选择也可以进行输入.下边的代码就是在select选择框上放了一个input框,覆盖在select上面.实现伪装的select效果 ...
- springMVC系统异常处理及自定异常处理
配置系统异常处理器 1.后台模拟一个异常 @RequestMapping(value = "/myexception.do", produces = "text/html ...
- LSM树——放弃读能力换取写能力,将多次修改放在内存中形成有序树再统一写入磁盘
LSM树(Log-Structured Merge Tree)存储引擎 代表数据库:nessDB.leveldb.hbase等 核心思想的核心就是放弃部分读能力,换取写入的最大化能力.LSM Tree ...
- 布隆过滤器(Bloom Filter)详解——基于多hash的概率查找思想
转自:http://www.cnblogs.com/haippy/archive/2012/07/13/2590351.html 布隆过滤器[1](Bloom Filter)是由布隆(Burton ...
- 在 Visual C# 项目中调用 VBA 中的代码
https://msdn.microsoft.com/zh-cn/library/Bb608613.aspx http://www.cnblogs.com/yangbin1005/archive/20 ...
- 个人收集的一些网页上一键云DDOS攻击的网站、IP地址测试,服务器压力测试
http://bbs.itzmx.com/thread-9018-1-1.html #1 - Network Stresser - http://networkstresser.com#2 - Lif ...
- Octopus系列之开发过程各个技术点
自定义了页面周期 使用唯一的一个VelocityEngine全局的静态实例,优化了小泥鳅blog中每次请求都要创建VelocityEngine实例对象,减少了对象的开销 通过UA判断请求来自的设备,从 ...