作业要求20191010-4 alpha week 1/2 Scrum立会报告+燃尽图 02
此作业要求参见:https://edu.cnblogs.com/campus/nenu/2019fall/homework/8747
一、小组情况
组长:贺敬文
组员:彭思雨 王志文 位军营 杨萍
队名:胜利点
二、Scrum例会
时间:2019年10月11日
本次Scrum Master:位军营
要求1 工作照片


要求2 时间跨度
2019年10月11日11:32 至 2019年10月11日 11:58
共计 26 分钟
要求3 地点
东北师范大学信息科学与技术学院楼107室。
要求4 立会内容包括:
(1)昨天的成绩
1.分配好燃尽图的master
2. 汇报项目进度。
(2)今天的计划
1.写出“客服”这一界面。
2.讨论贡献分配。
3.汇报项目进度。
(3)目前的困难
1.如何实现微信小程序中两个js文件的数据交互。
2.如何在js中改变css中的格子参数。
3.如何把从txt文件中读出的数据(每一关的表)进行存储。
要求5 todo list
|
任务ID |
任务 |
任务执行人 |
截止日期 |
状态 |
|
1 |
10月10日确定每日会议master与例会时间地点 |
杨萍 |
10月10日24:00 |
已完成 |
|
2 |
讨论贡献分配 |
所有人 |
10月16日20:00 |
未完成 |
|
3 |
分配master人员 |
所有人 |
10月10日24:00 |
已完成 |
|
4 |
10月11日Scrum立会报告加燃尽图 |
王志文 |
10月11日 24:00 |
已完成 |
|
5 |
讨论并决定Alpha阶段小组分工 |
所有人 |
10月11日 24:00 |
已完成 |
|
6 |
10月12日Scrum立会报告加燃尽图 |
位军营 |
10月12日21:00 |
已完成 |
|
7 |
10月13日Scrum立会报告加燃尽图 |
彭思雨 |
10月13日24:00 |
已完成 |
|
8 |
10月14日Scrum立会报告加燃尽图 |
贺敬文 |
10月14日24:00 |
未完成 |
|
9 |
将单词录入txt文件 |
贺敬文 王志文 彭思雨 |
10月14日24:00 |
未完成 |
|
10 |
10月15日Scrum立会报告加燃尽图 |
杨萍 |
10月15日24:00 |
未完成 |
|
11 |
读取txt文件代码部分 |
位军营 |
10月15日24:00 |
未完成 |
|
12 |
input框的显示隐藏 |
位军营 |
10月15日24:00 |
未完成 |
|
13 |
10月16日Scrum立会报告加燃尽图 |
彭思雨 |
10月16日24:00 |
未完成 |
|
14 |
客服界面实现 |
杨萍 |
10月16日20:00 |
未完成 |
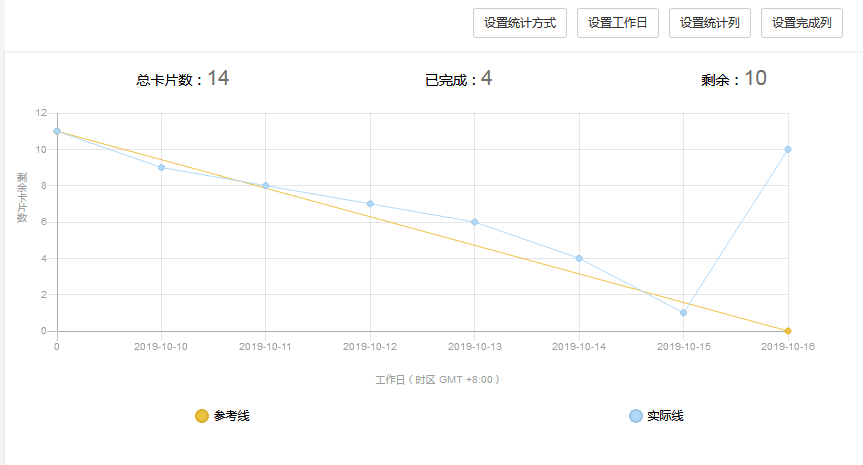
三、燃尽图
要求1 使用 [https://www.leangoo.com/]。
要求2 每日更新并与立会报告发布在同一博客中。
要求3 纵轴与Scrum报告中的 todo list部分中的功能相符,即燃尽图纵轴功能点数与todo list任务数相同,燃尽图已完成功能点数与todo list已完成任务数相同。
Leangoo看板链接:https://www.leangoo.com/kanban/board/go/3034232#
作业要求20191010-4 alpha week 1/2 Scrum立会报告+燃尽图 02的更多相关文章
- 20191017-3 alpha week 2/2 Scrum立会报告+燃尽图 02
此作业要求参见https://edu.cnblogs.com/campus/nenu/2019fall/homework/9799 一.小组情况 队名:扛把子 组长:迟俊文 组员:宋晓丽 梁梦瑶 韩昊 ...
- 20191010-4 alpha week 1/2 Scrum立会报告+燃尽图 02
此作业要求参见https://edu.cnblogs.com/campus/nenu/2019fall/homework/8747 一.小组情况 组长:迟俊文 组员:宋晓丽 梁梦瑶 韩昊 刘信鹏 队名 ...
- Alpha阶段第2周/共2周 Scrum立会报告+燃尽图 02
此次作业要求参见 [https://edu.cnblogs.com/campus/nenu/2018fall/homework/2285] Scrum master:祁玉 一.小组介绍 组长:王一可 ...
- 20181016-4 Alpha阶段第1周/共2周 Scrum立会报告+燃尽图 02
此次作业要求参见 [https://edu.cnblogs.com/campus/nenu/2018fall/homework/2247] Scrum master:祁玉 一.小组介绍 组长:王一可 ...
- 作业要求20181204-7 Final阶段第1周/共1周 Scrum立会报告+燃尽图 02
作业要求参见https://edu.cnblogs.com/campus/nenu/2018fall/homework/2481 版本控制地址https://git.coding.net/lglr20 ...
- 作业要求20181113-4 Beta阶段第1周/共2周 Scrum立会报告+燃尽图 02
作业要求:https://edu.cnblogs.com/campus/nenu/2018fall/homework/2384 版本控制:[https://git.coding.net/lglr201 ...
- 作业要求20181023-4 Alpha阶段第2周/共2周 Scrum立会报告+燃尽图 02
作业要求[https://edu.cnblogs.com/campus/nenu/2018fall/homework/2284] 版本控制:https://git.coding.net/liuyy08 ...
- 作业要求20191010-9 alpha week 1/2 Scrum立会报告+燃尽图 07
此作业要求参见:https://edu.cnblogs.com/campus/nenu/2019fall/homework/8752 一.小组情况组长:贺敬文组员:彭思雨 王志文 位军营 杨萍队名:胜 ...
- 作业要求20191010-3 alpha week 1/2 Scrum立会报告+燃尽图 01
此作业要求参见:https://edu.cnblogs.com/campus/nenu/2019fall/homework/8746 一.小组情况组长:贺敬文组员:彭思雨 王志文 位军营 杨萍队名:胜 ...
随机推荐
- php运行结果设置无缓存
修改配置php.ini vim /usr/local/php/lib/php.ini opcache.enable= 重启php服务 service php-fpm restart done! 参考地 ...
- Redis windows服务器配置可远程连接
Redis配置远程可访问:修改redis.conf或redis.windows-service.conf配置文件. 具体通过 1:将绑定的本机给注释掉,找到这行 bind 127.0.0.1,然后在前 ...
- luogu P4006 小 Y 和二叉树
luogu loj 可以发现度数\(< 3\)的点可以作为先序遍历的第一个点,那么就把度数\(< 3\)的编号最小的点作为第一个点.然后现在要确定它的左右儿子(或者是右儿子和父亲).我们把 ...
- django 中实现文件下载的3种方式
方法一:使用HttpResponse from django.shortcuts import HttpResponse def file_down(request): file=open('/hom ...
- laravel 5.7 引入Illuminate\Http\Request 在类内调用 Request 提示不存在的问题
laravel报错: ReflectionException Class App\Http\Controllers\Request does not exist 解决办法: namespace App ...
- JS定时器的用法及示例
JS定时器的用法及示例 目录 js 定时器的四个方法 示例一 示例二 示例三 js 定时器的四个方法 setInterval() :按照指定的周期(以毫秒计)来调用函数或计算表达式.方法会不停地调用函 ...
- Tomcat配置JNDI
JNDI是什么?使用JNDI有什么好处? JNDI是 Java 命名与目录接口(Java Naming and Directory Interface),在J2EE规范中是重要的规范之一. 我个人对j ...
- java内存泄漏与处理
内存溢出 out of memory,是指程序在申请内存时,没有足够的内存空间供其使用,出现out of memory: 内存泄露 memory leak,是指程序在申请内存后,无法释放已申请的内存空 ...
- Gym - 102082G What Goes Up Must Come Down (树状数组+贪心)
题意:有一个长度为n的序列,你每次可以选择两个相邻的元素交换,求把这个序列排成单峰序列的最少交换次数. 方法一:将元素按数值从大到小排序(保存原来的位置),把最大的插在中间,剩下的依次往两边放,依次考 ...
- 【洛谷P3128】Max Flow
题目大意:给定一棵 N 个节点的无根树,有 M 个操作,每次选定一条树链,将这条链上所有点的点权 +1,最后求树上点的最大点权是多少. 题解:树上差分算法的应用. 发现操作有 M 次,但是询问只有一次 ...