Win7+keras+tensorflow使用YOLO-v3训练自己的数据集
一、下载和测试模型
1. 下载YOLO-v3
git clone https://github.com/qqwweee/keras-yolo3.git
这是在Ubuntu里的命令,windows直接去 https://github.com/qqwweee/keras-yolo3下载、解压。得到一个 keras-yolo3-master 文件夹
2. 下载权重
wget https://pjreddie.com/media/files/yolov3.weights
去 https://pjreddie.com/media/files/yolov3.weights 下载权重。将 yolov3.weights 放入 keras-yolo3-master 文件夹
3. 生成 h5 文件
python convert.py yolov3.cfg yolov3.weights model_data/yolo.h5
执行convert.py文件,这是将darknet的yolo转换为用于keras的h5文件,生成的h5被保存在model_data下。命令中的 convert.py 和 yolo.cfg 已经在keras-yolo3-master 文件夹下,不需要单独下载。
4. 用已经被训练好的yolo.h5进行图片识别测试
python yolo_video.py --image
执行后会让你输入一张图片的路径,由于我准备的图片放在与yolo_video.py同级目录,所以直接输入图片名称,不需要加路径
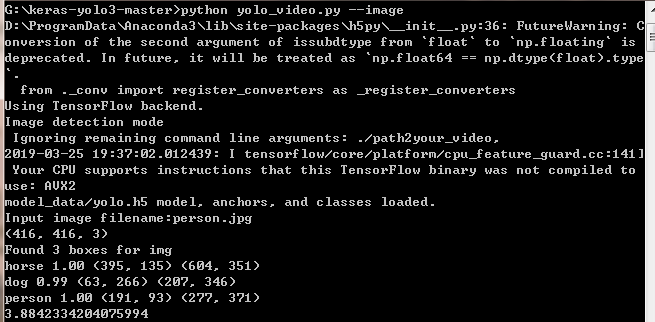
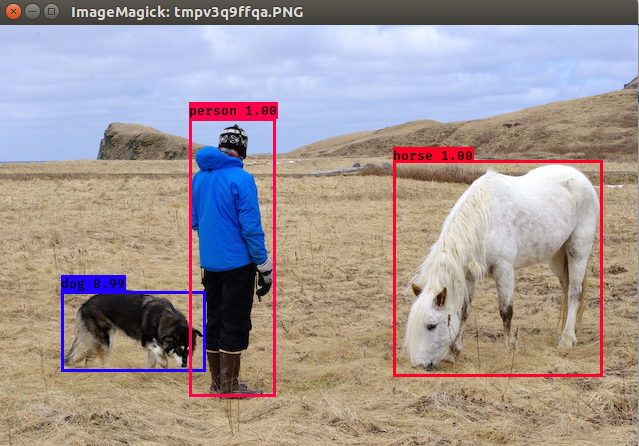
这就表明测试成功了。
二、制作自己的VOC数据集
参考我原来写的博客:
在Ubuntu内制作自己的VOC数据集
我是在Ubuntu内标注然后移到Windows的,如果在Windows里安装了LabelImg,可以直接在Windows下标注。
最后文件布局为:
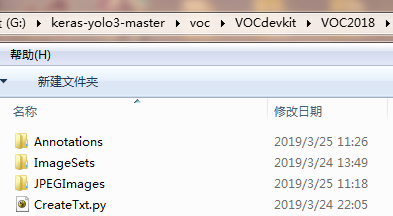
三、修改配置文件、执行训练
1. 复制 voc_annotation.py 到voc文件夹下,修改 voc_annotation.py 分类。如下图:
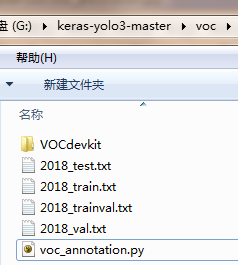 执行 voc_annotation.py 获得这四个文件
执行 voc_annotation.py 获得这四个文件
import xml.etree.ElementTree as ET
from os import getcwd sets=[('', 'train'), ('', 'val'), ('', 'test'), ('', 'trainval')] classes = [] def convert_annotation(year, image_id, list_file):
in_file = open('VOCdevkit\VOC%s\Annotations\%s.xml'%(year, image_id), encoding = 'utf-8')
tree=ET.parse(in_file)
root = tree.getroot() for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult)==1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (int(xmlbox.find('xmin').text), int(xmlbox.find('ymin').text), int(xmlbox.find('xmax').text), int(xmlbox.find('ymax').text))
list_file.write(" " + ",".join([str(a) for a in b]) + ',' + str(cls_id)) wd = getcwd() for year, image_set in sets:
image_ids = open('VOCdevkit\VOC%s\ImageSets\Main\%s.txt'%(year, image_set)).read().strip().split()
list_file = open('%s_%s.txt'%(year, image_set), 'w')
for image_id in image_ids:
list_file.write('%s\VOCdevkit\VOC%s\JPEGImages\%s.jpg'%(wd, year, image_id))
convert_annotation(year, image_id, list_file)
list_file.write('\n') list_file.close()
网上都是 train、val、test、三个文件。但我觉得还应该加一个 trainval。还有将所有的 / 改为 \ (Windows下路径表示和linux下不同)。高亮部分是为了防止Windows读取错误(博主就恰好碰到了)
2. 在model_data文件夹下新建一个 my_classes.txt(可以根据你的数据来,比如你检测是花的种类,可以叫 flower.txt。起名最好有意义),将你的类别写入,一行一个。
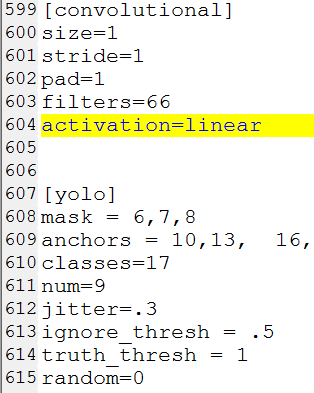
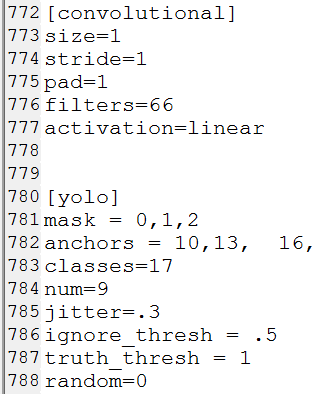
3. 修改yolov3.cfg 文件
使用迁移学习思想,用已经预训练好的权重接着训练。需要下面的修改步骤:
IDE里直接打开cfg文件,ctrl+f搜 yolo, 总共会搜出3个含有yolo的地方。
每个地方都要修改3处,
filter :3*(5+len(classes))
classes:len(classes) 我的类别是17
random:原来是1,显存小改为0

重新生成h5文件
python convert.py -w yolov3.cfg yolov3.weights model_data/yolo_weights.h5
4. 训练
执行下面的train.py
python train.py
"""
Retrain the YOLO model for your own dataset.
"""
import numpy as np
import keras.backend as K
from keras.layers import Input, Lambda
from keras.models import Model
from keras.callbacks import TensorBoard, ModelCheckpoint, EarlyStopping from yolo3.model import preprocess_true_boxes, yolo_body, tiny_yolo_body, yolo_loss
from yolo3.utils import get_random_data def _main():
annotation_path = 'voc/2018_trainval.txt'
log_dir = 'model_data/logs/'
classes_path = 'model_data/my_classes.txt'
anchors_path = 'model_data/yolo_anchors.txt'
class_names = get_classes(classes_path)
anchors = get_anchors(anchors_path)
input_shape = (416,416) # multiple of 32, hw
model = create_model(input_shape, anchors, len(class_names) )
train(model, annotation_path, input_shape, anchors, len(class_names), log_dir=log_dir) def train(model, annotation_path, input_shape, anchors, num_classes, log_dir='logs/'):
model.compile(optimizer='adam', loss={
'yolo_loss': lambda y_true, y_pred: y_pred})
logging = TensorBoard(log_dir=log_dir)
checkpoint = ModelCheckpoint(log_dir + "ep{epoch:03d}-loss{loss:.3f}-val_loss{val_loss:.3f}.h5",
monitor='val_loss', save_weights_only=True, save_best_only=True, period=1)
batch_size = 10
val_split = 0.2
with open(annotation_path) as f:
lines = f.readlines()
np.random.shuffle(lines)
num_val = int(len(lines)*val_split)
num_train = len(lines) - num_val
print('Train on {} samples, val on {} samples, with batch size {}.'.format(num_train, num_val, batch_size)) model.fit_generator(data_generator_wrap(lines[:num_train], batch_size, input_shape, anchors, num_classes),
steps_per_epoch=max(1, num_train//batch_size),
validation_data=data_generator_wrap(lines[num_train:], batch_size, input_shape, anchors, num_classes),
validation_steps=max(1, num_val//batch_size),
epochs=20,
initial_epoch=0)
model.save_weights(log_dir + 'trained_weights.h5') def get_classes(classes_path):
with open(classes_path) as f:
class_names = f.readlines()
class_names = [c.strip() for c in class_names]
return class_names def get_anchors(anchors_path):
with open(anchors_path) as f:
anchors = f.readline()
anchors = [float(x) for x in anchors.split(',')]
return np.array(anchors).reshape(-1, 2) def create_model(input_shape, anchors, num_classes, load_pretrained=False, freeze_body=False,
weights_path='model_data/yolo_weights.h5'):
K.clear_session() # get a new session
image_input = Input(shape=(None, None, 3))
h, w = input_shape
num_anchors = len(anchors)
y_true = [Input(shape=(h//{0:32, 1:16, 2:8}[l], w//{0:32, 1:16, 2:8}[l], \
num_anchors//3, num_classes+5)) for l in range(3)] model_body = yolo_body(image_input, num_anchors//3, num_classes)
print('Create YOLOv3 model with {} anchors and {} classes.'.format(num_anchors, num_classes)) if load_pretrained:
model_body.load_weights(weights_path, by_name=True, skip_mismatch=True)
print('Load weights {}.'.format(weights_path))
if freeze_body:
# Do not freeze 3 output layers.
num = len(model_body.layers)-3
for i in range(num): model_body.layers[i].trainable = False
print('Freeze the first {} layers of total {} layers.'.format(num, len(model_body.layers))) model_loss = Lambda(yolo_loss, output_shape=(1,), name='yolo_loss',
arguments={'anchors': anchors, 'num_classes': num_classes, 'ignore_thresh': 0.5})(
[*model_body.output, *y_true])
model = Model([model_body.input, *y_true], model_loss)
return model
def data_generator(annotation_lines, batch_size, input_shape, anchors, num_classes):
n = len(annotation_lines)
np.random.shuffle(annotation_lines)
i = 0
while True:
image_data = []
box_data = []
for b in range(batch_size):
i %= n
image, box = get_random_data(annotation_lines[i], input_shape, random=True)
image_data.append(image)
box_data.append(box)
i += 1
image_data = np.array(image_data)
box_data = np.array(box_data)
y_true = preprocess_true_boxes(box_data, input_shape, anchors, num_classes)
yield [image_data, *y_true], np.zeros(batch_size) def data_generator_wrap(annotation_lines, batch_size, input_shape, anchors, num_classes):
n = len(annotation_lines)
if n==0 or batch_size<=0: return None
return data_generator(annotation_lines, batch_size, input_shape, anchors, num_classes) if __name__ == '__main__':
_main()
代码标红的地方,需要根据自己实际情况进行修改。
其他可以设置的参数
batch_size = 32:默认值比较大,对电脑性能有要求。可以调小。我设置的是10
val_split = 0.1 : 这个表示,验证集占训练集的比例。建议划分大点。不然验证集的图片会很少。不利于验证集loss的计算
epochs = 100,可以调小一点。我设置的是20
参考地址:
https://blog.csdn.net/m0_37857151/article/details/81330699
https://blog.csdn.net/mingqi1996/article/details/83343289
Win7+keras+tensorflow使用YOLO-v3训练自己的数据集的更多相关文章
- YOLO V3训练自己的数据集
数据的输入几乎和Faster rcnn一样,标签格式xml是一样的. 相比Faster rcnn,数据多了一步处理,通过voc_annotation.py将图片路径和bbox+class存储在txt下 ...
- 【TensorFlow】Win7下使用Object Detection API 训练自己的数据集,并视频实时检测
说明: 图片:自己开的摄像头,截取的图片.选择了200张图片.下面会有截取的脚本. 使用labelImg工具进行图片进行标注.产生PascalVOC格式的XML文件.[labelImg工具的安装和使用 ...
- 【tf.keras】在 cifar 上训练 AlexNet,数据集过大导致 OOM
cifar-10 每张图片的大小为 32×32,而 AlexNet 要求图片的输入是 224×224(也有说 227×227 的,这是 224×224 的图片进行大小为 2 的 zero paddin ...
- 【Tensorflow】 Object_detection之训练PASCAL VOC数据集
参考:Running Locally 1.检查数据.config文件是否配置好 可参考之前博客: Tensorflow Object_detection之配置Training Pipeline Ten ...
- 深度学习笔记(十三)YOLO V3 (Tensorflow)
[代码剖析] 推荐阅读! SSD 学习笔记 之前看了一遍 YOLO V3 的论文,写的挺有意思的,尴尬的是,我这鱼的记忆,看完就忘了 于是只能借助于代码,再看一遍细节了. 源码目录总览 tens ...
- 【深度学习】keras + tensorflow 实现猫和狗图像分类
本文主要是使用[监督学习]实现一个图像分类器,目的是识别图片是猫还是狗. 从[数据预处理]到 [图片预测]实现一个完整的流程, 当然这个分类在 Kaggle 上已经有人用[迁移学习](VGG,Resn ...
- YOLO v3
yolo为you only look once. 是一个全卷积神经网络(FCN),它有75层卷积层,包含跳跃式传递和降采样,没有池化层,当stide=2时用做降采样. yolo的输出是一个特征映射(f ...
- keras系列︱图像多分类训练与利用bottleneck features进行微调(三)
引自:http://blog.csdn.net/sinat_26917383/article/details/72861152 中文文档:http://keras-cn.readthedocs.io/ ...
- A Newbie’s Install of Keras & Tensorflow on Windows 10 with R
This weekend, I decided it was time: I was going to update my Python environment and get Keras and T ...
随机推荐
- 4月11日java多线程4
继昨天学习了线程池之后,今天学习了多线程内的锁Lock. 定义方法: ReentrantLock queueLock = new ReentrantLock(); //可重入锁 ReentrantRe ...
- [模板] 快速傅里叶变换/FFT/NTT
简介 FFT是多项式乘法的一种快速算法, 时间复杂度 \(O(n \log n)\). FFT可以用于求解形如\(C_i = \sum_{j=0}^i A_jB_{i-j}\)的式子. 如果下标有偏差 ...
- kubernetes 将pod运行在某些特定的节点上,给节点打标签
给节点打上标签: kubectl label node <node_name> GPU=true #打上标签 GPU=true 在创建pod的yaml文件时: 添加 nodeSel ...
- [NOI2009]诗人小G(dp + 决策单调性优化)
题意 有一个长度为 \(n\) 的序列 \(A\) 和常数 \(L, P\) ,你需要将它分成若干段,每 \(P\) 一段的代价为 \(| \sum ( A_i ) − L|^P\) ,求最小代价的划 ...
- vue学习笔记(四)- cmd无法识别vue命令解决方法
解决控制台无法识别vue命令问题 作者:狐狸家的鱼 本文链接:cmd无法识别vue命令解决方法 GitHub:sueRimn 在控制台输入vue会报以下错误: vue : 无法将“vue”项识别为 c ...
- Springboot 3.需求携带参数的get请求
还是拿来上节讲的代码: package com.course.server; import org.springframework.web.bind.annotation.*; import java ...
- 一张图认识Python(附基本语法总结)
一张图带你了解Python,更快入门, Python基础语法总结: 1.Python标识符 在 Python 里,标识符有字母.数字.下划线组成. 在 Python 中,所有标识符可以包括英文.数字以 ...
- (最短路 Floyd) P2910 [USACO08OPEN]寻宝之路Clear And Present Danger 洛谷
题意翻译 题目描述 农夫约翰正驾驶一条小艇在牛勒比海上航行. 海上有N(1≤N≤100)个岛屿,用1到N编号.约翰从1号小岛出发,最后到达N号小岛. 一张藏宝图上说,如果他的路程上经过的小岛依次出现了 ...
- vue-cli项目生成
安装vue-cli C:\Users\fei>npm install -g vue-cli npm WARN deprecated coffee-script@1.12.7: CoffeeScr ...
- Docker: 基础介绍 [一]
一.Docker介绍 Docker是Docker.lnc公司开源的一个基于LXC技术之上构建的Container容器引擎,源代码托管在Github上,基于Go语言并遵从Apache2.0协议开源 Do ...