在ROS下编写自己的节点来订阅话题(C++)
参考 http://blog.csdn.net/u013453604/article/details/49102957 的博客,其实这些内容和 《开源机器人操作系统》 这本书差不多。
具体的步骤我就不多说了,,不过我这里是在QT 中开发的,,个人觉得还是很方便的。。
这里就讲一下我遇到的问题,
------在编写好 .cpp 之后,我按照自己的理解修改了 CMakeLists.txt 文件,,但总是会出现一个错误:
[rosrun] Couldn't find executable named。。。。。。。。。
这个信息的意思是:没有catkin_make 这个节点文件,
但是我反复试了好几次catkin_make,,在QT试了,,也在终端中试了,,但还是不行,,
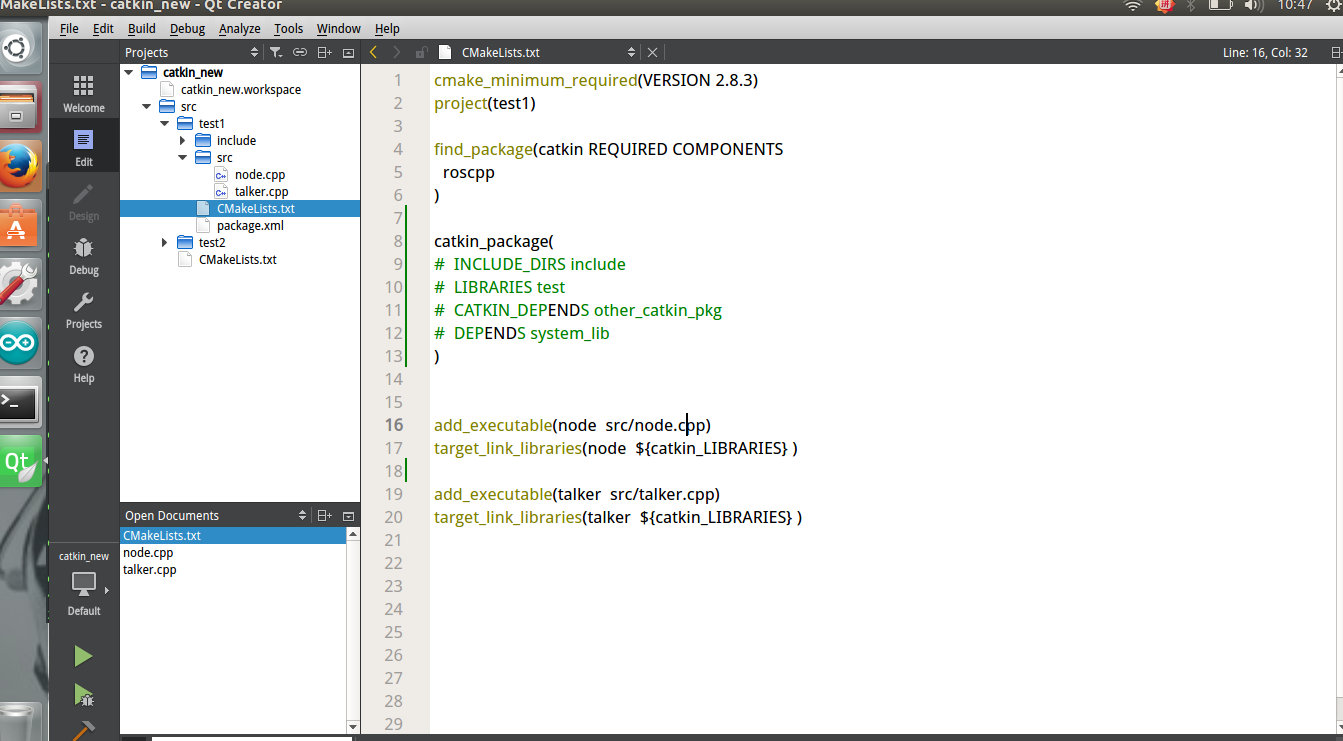
所以我就好好的查看 CMakeLists.txt 文件 ,,果然,,我把下面的内容给删掉了:
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES test
# CATKIN_DEPENDS other_catkin_pkg
# DEPENDS system_lib
)
加上这个之后就好了。。。。。
但这几句是什么意思呢?
[function defined in catkin_package.cmake]
应该是在工作空间中定义需要 catkin_make 的包,,如果没有这个的话,,catkin_make 就找不到要编译的包
这是我个人理解,,不知道正确与否,,还希望大神能够指出我的错误。。。。。
附上截图
哈
在ROS下编写自己的节点来订阅话题(C++)的更多相关文章
- ROS下创建第一个节点工程
1.创建工作区 mkdir catkin_ws cd catkin_ws mkdir src 2.在src目录下创建包Myrobot,后面所跟roscpp rospy为依赖包 catkin_creat ...
- ROS手动编写消息发布器和订阅器topic demo(C++)
1.首先创建 package cd ~/catkin_ws/src catkin_create_pkg topic_demo roscpp rospy std_msgs 2. 编写 msg 文件 cd ...
- ros下多机器人系统(1)
multi-robot system 经过两个多月的ros学习,对ros的认识有了比较深入的了解,本篇博客主要记录在ros下开发多机器人系统以及对ros更深入的开发.本篇博客是假定读者已经学习完了全部 ...
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- pl-svo在ROS下运行笔记
一.程序更改的思路(参考svo_ros的做法): 1.在ROS下将pl-svo链接成库需要更改相应的CMakeLists.txt文件,添加package.xml文件: 2.注册一个ROS节点使用svo ...
- ros下基于百度语音的,语音识别和语音合成
代码地址如下:http://www.demodashi.com/demo/13153.html 概述: 本demo是ros下基于百度语音的,语音识别和语音合成,能够实现文字转语音,语音转文字的功能. ...
- ROS下使用ASUS Xtion Pro Live
一.ROS官网hydro版本OpenNI安装 3. Installation 3.1 Ubuntu installation To install only openni_camera: sudo a ...
- LSD-SLAM深入学习(1)-基本介绍与ros下的安装
前言 借鉴来自RGB-D数据处理的两种方法-基于特征与基于整体的,同样可以考虑整个图片的匹配,而不是只考虑特征点的…… 一般这种稠密的方法需要很大的计算量,DTAM: Dense tracking a ...
- SQL 递归查询(根据指定的节点向上获取所有父节点,向下获取所有子节点)
--------------------01.向上查找所有父节点-----------------WITH TEMP AS (SELECT * FROM CO_Department WHERE ID= ...
随机推荐
- 初学Memcached安装及使用(CentOS7)
1.yum install memcached安装memecached 2.chkconfig memcached on设置memcached开机启动 3.service memcached star ...
- Tips for writing a paper
Tips for writing a paper 1. Tips for Paper Writing 2.• Before you write a paper • When you are writi ...
- 【经典】C++&RPG对战游戏
博文背景: 还记大二上学期的时候看的这个C++&RPG游戏(博主大一下学期自学的php,涵盖oop内容),一个外校的同学他们大一学的C++,大二初期C++实训要求做一个程序填空,就是这个 RP ...
- cookie和浏览器
XHR API允许应用添加自定义的HTTP首部(通过setRequestHeader()方法),同时也有一些首部都是应用代码不能设定的. Accept-Charset.Accept-Encoding. ...
- PhpStorm 快捷键
不容易记住的: Ctrl + Shift + F 查找文本,在项目目录或指定的目录 Ctrl + Shift + R 查找文本并替换,在项目目录或指定的目录 Ctrl + E 打开最近关闭的 ...
- 使用HttpFileServer自建下载服务器
如今单位办公离不开电脑,使用电脑离不开资料传输,举一个简单的例子吧,很多用户经常在电脑上编辑文件,这些文件往往打印出来给领导审阅,可是你电脑上没有打印机,这时你会想到通过优盘.网络硬盘.邮箱.QQ等方 ...
- MD5 (摘要加密)
MD5 约定 同样的密码,同样的加密算法,每次加密的结果是不一样 密码方案 方案一:直接 MD5 pwd = pwd.md5String; 非常不安全 方案二 MD5 + 盐 pwd = [pwd s ...
- android自定义控件(1)-点击实现开关按钮切换
自定义控件的步骤.用到的主要方法: 1.首先需要定义一个类,继承自View:对于继承View的类,会需要实现至少一个构造方法:实际上这里一共有三个构造方法: public View (Contex ...
- 代码中access 的使用
C++代码:if(access(strZip.c_str(), 0) == 0){...} 此处为判断strZip中文件是否存在 .c_str() 是他自身字符串名称,该名称是一个压缩文件 ...
- 一款符合当前主流审美的Swing外观(Look and Feel)_测试版发布
[前言] 本文将展示的是一款J2SE平台Swing外观(Look and Feel)实现,目前给出的演示jar包仅供测试之用,主体工作已经完成,余下是兼容性测试和调整,附件中的演示jar包推荐运行于j ...