[OpenCV实战]18 Opencv中的单应性矩阵Homography
目录
《圣经》记载,当时人类联合起来兴建希望能通往天堂的高塔;为了阻止人类的计划,上帝让人类说不同的语言,使人类相互之间不能沟通,计划因此失败。
像“Homography”这样的术语经常提醒我,我们仍然在与沟通斗争。Homography(单应性)是一个简单的概念,却有一个奇怪的名字!
1 介绍
1.1 什么是Homography
考虑图1所示的同一个平面(比如书皮)的两幅图像。红点表示两幅图像中相同的物理坐标点。在计算机视觉术语中,我们称之为对应点。

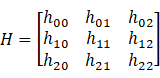
Homography就是将一张图像上的点映射到另一张图像上对应点的3x3变换矩阵。因此该矩阵我们可以表示为:
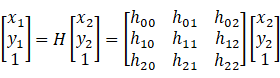
让我们考虑一组对应点, 位于第一张图像和
位于第一张图像和 位于第二张图像中。然后,Homography以下列方式映射它们:
位于第二张图像中。然后,Homography以下列方式映射它们:
1.2 使用Homography进行图像对齐
只要它们位于现实世界中的同一平面上,上述等式对于所有对应点都是正确的。换句话说,您可以将单应性应用于第一张图像,第一张图像中的书籍将与第二张图像中的书籍对齐!见下图。那么对于不在此平面上的点呢?这时再应用 Homography 就无法再对齐到对应点了。比如下图的桌子,地板。对于这种图像中有多个平面的情况,我们就需要针对每一个平面使用单独的Homography进行对齐。

1.3 Homography的应用-全景拼接
在上一节中,我们了解到如果已知两个图像之间的Homography,我们可以将一个图像映射到另一个图像上。但是,有一个很大的问题。图像必须位于同一个平面(书的顶部),并且只有该平面部分才会正确对齐。事实证明,如果您拍摄任何不包括一个平面的场景,然后通过旋转相机拍摄第二张照片,这两张图片就可以通过Homography相关联!您刚刚拍摄的完全随意的3D场景的两个图像可以用Homography相关联。这两个图像将共享一些可以对齐和拼接的公共区域,并且可以获得两个图像的全景图。然而这只是很粗糙的全景拼接,但基本原则是使用Homography和智能拼接。
2 Homography的计算
要计算两个图像之间的单应性,您需要知道两个图像之间至少有4个点对应关系。如果你有超过4个对应点,那就更好了。原因在于对于 H 矩阵,一般设 H22 为 1, 所以 H 有 8 个未知参数。至少需要8 个等式才能求解。而一组对应点可以提供 2 个等式,所以,至少需要 4 组对应点(任意三点不共线)来求得 H。OpenCV将稳健地估计最适合所有对应点的单应性。通常,这些点对应是通过匹配图像之间的SIFT或SURF等特征自动找到的,但在这篇文章中我们只是提前设定特征点。代码如下:
C++代码:
// OpenCV_Homography.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
#include "pch.h"
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
// Read source image 原图
Mat im_src = imread("./image/book2.jpg");
// Four corners of the book in source image 4个角点
vector<Point2f> pts_src;
pts_src.push_back(Point2f(141, 131));
pts_src.push_back(Point2f(480, 159));
pts_src.push_back(Point2f(493, 630));
pts_src.push_back(Point2f(64, 601));
// Read destination image.目标图
Mat im_dst = imread("./image/book1.jpg");
// Four corners of the book in destination image. 4个对应点
vector<Point2f> pts_dst;
pts_dst.push_back(Point2f(318, 256));
pts_dst.push_back(Point2f(534, 372));
pts_dst.push_back(Point2f(316, 670));
pts_dst.push_back(Point2f(73, 473));
// Calculate Homography 计算Homography需要至少4组对应点.
// pts_src : 源图像点坐标,pts_dst : 结果图像坐标
Mat h = findHomography(pts_src, pts_dst);
// Output image
Mat im_out;
// Warp source image to destination based on homography 仿射变换
warpPerspective(im_src, im_out, h, im_dst.size());
// Display images
imshow("Source Image", im_src);
imshow("Destination Image", im_dst);
imshow("Warped Source Image", im_out);
waitKey(0);
return 0;
}python代码:
#!/usr/bin/env python
import cv2
import numpy as np
if __name__ == '__main__' :
# Read source image.
im_src = cv2.imread('./image/book2.jpg')
# Four corners of the book in source image
pts_src = np.array([[141, 131], [480, 159], [493, 630],[64, 601]])
# Read destination image.
im_dst = cv2.imread('./image/book1.jpg')
# Four corners of the book in destination image.
pts_dst = np.array([[318, 256],[534, 372],[316, 670],[73, 473]])
# Calculate Homography
h, status = cv2.findHomography(pts_src, pts_dst)
# Warp source image to destination based on homography
im_out = cv2.warpPerspective(im_src, h, (im_dst.shape[1],im_dst.shape[0]))
# Display images
cv2.imshow("Source Image", im_src)
cv2.imshow("Destination Image", im_dst)
cv2.imshow("Warped Source Image", im_out)
cv2.waitKey(0)
3 总结
举个例子,例如虚拟广告牌,把下图1替换下图2的广告,得到下图3



实际步骤很简单
1 用选择上图2时代广场上广告屏的 4 个顶点,作为 pts_dst;
2 选取欲嵌入的图像的 4 个顶点,假设图像尺寸 W x H, 那么 四个顶点就是 (0,0), (0, W-1), (H - 1, 0), (H - 1, W - 1)。作为pts_src 类似下面代码,这样pts_src 和pts_dst就是一组对应点;
// Create a vector of points.
vector<Point2f> pts_src;
pts_src.push_back(Point2f(0,0));
pts_src.push_back(Point2f(size.width - 1, 0));
pts_src.push_back(Point2f(size.width - 1, size.height -1));
pts_src.push_back(Point2f(0, size.height - 1 ));3 使用 pts_dst 和 pts_src 计算 Homography;运用opencv中的findHomography就行了
// Calculate Homography 计算Homography需要至少4组对应点.
// pts_src : 源图像点坐标,pts_dst : 结果图像坐标
Mat h = findHomography(pts_src, pts_dst);4 对 源图像应用计算得到的 Homography 从而 混合到 目标图像上;然后计算仿射变化。
// Warp source image
warpPerspective(im_src, im_temp, h, im_temp.size());由于这个例子代码简单,具体代码就不贴出来了。所有代码见:
https://github.com/luohenyueji/OpenCV-Practical-Exercise
4 参考
https://www.learnopencv.com/homography-examples-using-opencv-python-c/
https://blog.csdn.net/baishuo8/article/details/80777995
[OpenCV实战]18 Opencv中的单应性矩阵Homography的更多相关文章
- 机器学习进阶-案例实战-图像全景拼接-图像全景拼接(RANSCA) 1.sift.detectAndComputer(获得sift图像关键点) 2.cv2.findHomography(计算单应性矩阵H) 3.cv2.warpPerspective(获得单应性变化后的图像) 4.cv2.line(对关键点位置进行连线画图)
1. sift.detectAndComputer(gray, None) # 计算出图像的关键点和sift特征向量 参数说明:gray表示输入的图片 2.cv2.findHomography(kp ...
- 相机标定 和 单应性矩阵H
求解相机参数的过程就称之为相机标定. 1.相机模型中的四个平面坐标系: 1.1图像像素坐标系(u,v) 以像素为单位,是以图像的左上方为原点的图像坐标系: 1.2图像物理坐标系(也叫像平面坐标系)(x ...
- OpenCV仿射变换+投射变换+单应性矩阵
本来想用单应性求解小规模运动的物体的位移,但是后来发现即使是很微小的位移也会带来超级大的误差甚至错误求解,看起来这个方法各种行不通,还是要匹配知道深度了以后才能从三维仿射变换来入手了,纠结~ esti ...
- opencv 仿射变换 投射变换, 单应性矩阵
仿射 estimateRigidTransform():计算多个二维点对或者图像之间的最优仿射变换矩阵 (2行x3列),H可以是部分自由度,比如各向一致的切变. getAffineTransform( ...
- OpenCV 之 平面单应性
上篇 OpenCV 之 图象几何变换 介绍了等距.相似和仿射变换,本篇侧重投影变换的平面单应性.OpenCV相关函数.应用实例等. 1 投影变换 1.1 平面单应性 投影变换 (Projectiv ...
- 单应性(homography)变换的推导
矩阵的一个重要作用是将空间中的点变换到另一个空间中.这个作用在国内的<线性代数>教学中基本没有介绍.要能形像地理解这一作用,比较直观的方法就是图像变换,图像变换的方法很多,单应性变换是其中 ...
- python opencv3 FLANN单应性匹配
git:https://github.com/linyi0604/Computer-Vision 匹配准确率非常高. 单应性指的是图像在投影发生了 畸变后仍然能够有较高的检测和匹配准确率 # codi ...
- 【Computer Vision】图像单应性变换/投影/仿射/透视
一.基础概念 1. projective transformation = homography = collineation. 2. 齐次坐标:使用N+1维坐标来表示N维坐标,例如在2D笛卡尔坐标 ...
- [OpenCV实战]13 OpenCV中使用Mask R-CNN进行对象检测和实例分割
目录 1 背景介绍 1.1 什么是图像分割和实例分割 1.2 Mask-RCNN原理 2 Mask-RCNN在OpenCV中的使用 2.1 模型下载 2.2 模型初始化 2.3 模型加载 2.4 输出 ...
随机推荐
- 基于QT和C++实现的翻金币游戏
基于QT和C++的翻金币游戏 声明: QT翻金币项目可以说是每个新学QT的同学都会去写的一个项目,网上的源码也很多,我也是最近刚开始学QT,所以也参考了很多前辈的代码自己重新敲了一遍代码. 游戏介绍: ...
- 知识图谱顶会论文(SIGIR-2022) MorsE:归纳知识图嵌入的元知识迁移
MorsE:归纳知识图嵌入的元知识迁移 论文题目: Meta-Knowledge Transfer for Inductive Knowledge Graph Embedding 论文地址: http ...
- 二十四、PV与PVC介绍
PV 与 PVC介绍 一.概念介绍 PersistentVolume (PV) 是由管理员设置的存储,它是群集的一部分.就像节点是集群中的资源一样,PV 也是集群中的资源. PV 是Volume 之 ...
- SpringBoot 常用注解的原理和使用
@AutoConfiguration 读取所有jar包下的 /META-INF/spring.factories 并追加到一个 LinkedMultiValueMap 中.每一个url中记录的文件路径 ...
- letcode刷题记录-day02-回文数
回文数 题目描述 给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中找出 和为目标值 target 的那 两个 整数,并返回它们的数组下标. 你可以假设每种输入只会对应一个答 ...
- 真正“搞”懂HTTP协议03之时间穿梭
上一篇我们简单的介绍了一下DoD模型和OSI模型,还着重的讲解了TCP的三次握手和四次挥手,让我们在空间层面,稍稍宏观的了解了HTTP所依赖的底层模型,那么这一篇,我们来追溯一下HTTP的历史,看一看 ...
- 记录redis集群连接超时问题及解决方案
下午同事反馈,某业务场景性能测试过程中,出现异常,提供日志报: Redis command timed out 1. 先看下日志 org.springframework.dao.QueryTimeou ...
- Spring Cloud Loadbalancer
Spring Cloud Loadbalancer---客户端负载均衡器 springcloud 2020.0.1 版本之后 删除了eureka中的ribbon,替代ribbon的是spring cl ...
- TreeUtils工具类一行代码实现列表转树 实战Java8 三级菜单 三级分类 附视频
一.序言 在日常一线开发过程中,总有列表转树的需求,几乎是项目的标配,比方说做多级菜单.多级目录.多级分类等,有没有一种通用且跨项目的解决方式呢?帮助广大技术朋友给业务瘦身,提高开发效率. 本文将基于 ...
- 快速构建一个简单的Springboot-web项目
web项目基本的核心成分 数据落地 MYSQL数据库 登录标识 JWT :{Java web token } 记录有效登录状态 以及缓存常用数据: Redis 数据库与JAVA实体的快速自动映射ORM ...