OSTU大津法图像分割
OSTU图像分割
最大类间方差法,也成大津法OSTU,它是按图像的灰度特性,将图像分成背景和目标2部分。背景和目标之间的类间方差越大,说明构成图像的2部分的差别越大,当部分目标错分为背景或部分背景错分为目标都会导致2部
分差别变小。因此,使类间方差最大的分割意味着错分概率最小。
包括以下几个步骤
求取图像的灰度直方图
# 读取图像
o_img = cv2.imread('source/house.png')
# 灰度化
img = cv2.cvtColor(o_img, cv2.COLOR_BGR2GRAY)
# 获取图片的长宽
u, v = img.shape[:2]
# 求取直方图
channel, bins = np.histogram(img.ravel(), 256, [0, 256])
计算全局最佳阈值
# 初始化阈值
threshold = 0
# 求取灰度值的和
for i in range(256):
threshold += i * channel[i]
# 计算全局最佳阈值
threshold = int(threshold / (u * v))
分割图像
# 初始化输出图像
out = np.zeros((u, v), np.uint8)
for i in range(u):
for j in range(v):
# 如果大于阈值就将其设定为白色,否则就为黑色
if img[i][j] > threshold:
out[i][j] = 255
else:
out[i][j] = 0
代码实现
import cv2
import numpy as np
o_img = cv2.imread('source/house.png')
# 灰度化
img = cv2.cvtColor(o_img, cv2.COLOR_BGR2GRAY)
u, v = img.shape[:2]
channel, bins = np.histogram(img.ravel(), 256, [0, 256])
threshold = 0
for i in range(256):
threshold += i * channel[i]
threshold = int(threshold / (u * v))
out = np.zeros((u, v), np.uint8)
for i in range(u):
for j in range(v):
if img[i][j] > threshold:
out[i][j] = 255
else:
out[i][j] = 0
ret, mask_front = cv2.threshold(img, 175, 255, cv2.THRESH_OTSU)
cv2.imshow('OSTU', mask_front)
cv2.imshow('out', out)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果
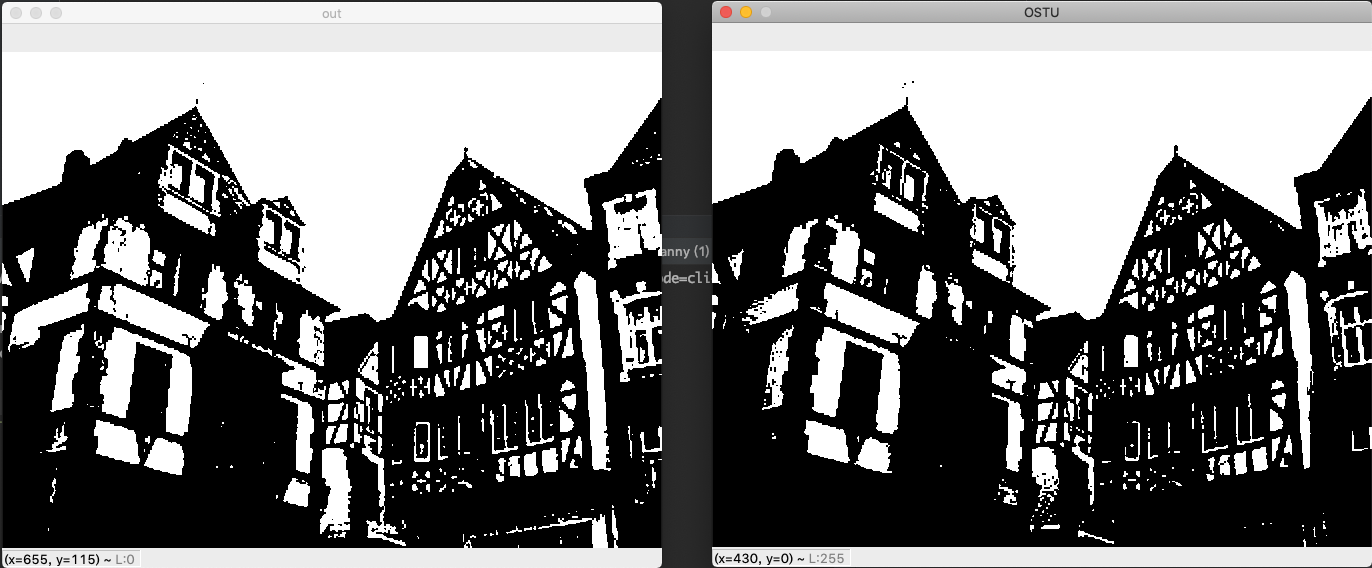
左侧为我自己实现的OSTU分割法,右侧为OpenCV自带的OSTU分割。
OSTU大津法图像分割的更多相关文章
- 大津法---OTSU算法
简介: 大津法(OTSU)是一种确定图像二值化分割阈值的算法,由日本学者大津于1979年提出.从大津法的原理上来讲,该方法又称作最大类间方差法,因为按照大津法求得的阈值进行图像二值化分割后,前景与背景 ...
- 自适应阈值二值化之最大类间方差法(大津法,OTSU)
最大类间方差法是由日本学者大津(Nobuyuki Otsu)于1979年提出的,是一种自适应的阈值确定的方法,又叫大津法,简称OTSU.它是按图像的灰度特性,将图像分成背景和目标2部分.背景和目标之间 ...
- 自适应阈值分割—大津法(OTSU算法)C++实现
大津法是一种图像灰度自适应的阈值分割算法,是1979年由日本学者大津提出,并由他的名字命名的.大津法按照图像上灰度值的分布,将图像分成背景和前景两部分看待,前景就是我们要按照阈值分割出来的部分.背景和 ...
- OTSU大津法对图像二值化
OTSU算法 (1)原理: 对于图像I(x,y),前景(即目标)和背景的分割阈值记作T,属于背景的像素个数占整幅图像的比例记为ω0,其平均灰度μ0:前景像素个数占整幅图像的比例为ω1,其平均灰度为μ1 ...
- 图像二值化----otsu(最大类间方差法、大津算法)
最大类间方差法是由日本学者大津于1979年提出的,是一种自适应的阈值确定的方法,又叫大津 法,简称OTSU.它是按图像的灰度特性,将图像分成背景和目标2部分.背景和目标之间的类间方差越大,说明构成图像 ...
- opencv python 图像二值化/简单阈值化/大津阈值法
pip install matplotlib 1简单的阈值化 cv2.threshold第一个参数是源图像,它应该是灰度图像. 第二个参数是用于对像素值进行分类的阈值, 第三个参数是maxVal,它表 ...
- 大M法(Big M Method)
前面一篇讲的单纯形方法的实现,但程序输入的必须是已经有初始基本可行解的单纯形表. 但实际问题中很少有现成的基本可行解,比如以下这个问题: min f(x) = –3x1 +x2 + x3 s.t. x ...
- 大O法时间复杂度计算
困惑的点——log,如何计算得出? ① 上限:用来表示该算法可能有的最高增长率. ② 大O表示法:如果某种算法的增长率上限(最差情况下)是f(n),那么说这种算法“在O(f(n))中”.n为输入规模. ...
- 运筹学笔记12 大M法
引入M,其中M是一个充分大的正数.由此,目标函数也改变为zM. 如此构造的线性规划问题我们记作LPM,称之为辅助线性规划问题,也即在原来的线性规划问题的基础上,改造了其等式约束条件,然后有对目标函数施 ...
随机推荐
- 半夜删你代码队 Day1冲刺
一.团队信息 1.团队项目:Midnight聊天室 2.团队名称:半夜删你代码队 3.队员信息: 职务 项目经理 主开发团队 测试人员 姓名 陈惠霖 周楚池 侯晓龙 余金龙 胡兆禧 林涛 二.Alph ...
- 题解-CF643G Choosing Ads
CF643G Choosing Ads \(n\) 和 \(m\) 和 \(p\) 和序列 \(a_i(1\le i\le n)\).\(m\) 种如下操作: 1 l r id 令 \(i\in[l, ...
- Java并发编程的艺术(三)——synchronized
什么是synchronized synchronized可以保证某个代码块或者方法被一个线程占有,保证了一个线程的可先性.java 1.6之前是重量级锁,在1.6进行了各种优化,就不那么重了,并引入了 ...
- Springboot mini - Solon详解(三)- Solon的web开发
Springboot min -Solon 详解系列文章: Springboot mini - Solon详解(一)- 快速入门 Springboot mini - Solon详解(二)- Solon ...
- 手动实现Promise.all()
Promise.all()方法用于将多个 Promise 实例,包装成一个新的 Promise 实例. Promise.all()方法的参数可以不是数组,但必须具有 Iterator 接口,且返回的每 ...
- linux下/etc/profile /etc/bashrc /root/.bashrc /root/.bash_profile这四个配置文件的加载顺序
目录 一.关于linux配置文件 二.验证四个配置文件的加载顺序 三.结论 一.关于linux配置文件 1.linux下主要有四个配置文件:/etc/profile ./etc/bashrc ./ro ...
- OGG报错:Cannot load ICU resource bundle 'ggMessage', error code 2 - No such file or directory
[oracle@dgdb1 ~]$ ggsci Oracle GoldenGate Command Interpreter for OracleVersion 11.2.1.0.3 14400833 ...
- 用Python写个开心消消乐小游戏
本文的文字及图片来源于网络,仅供学习.交流使用,不具有任何商业用途,如有问题请及时联系我们以作处理 提到开心消消乐这款小游戏,相信大家都不陌生,其曾在 2015 年获得过玩家最喜爱的移动单机游戏奖,受 ...
- 检验实时3D像素流送平台好坏的七个标准!(上)
将交互式3D像素流送技术作为有价值的企业工具之后,就该寻找像素流送服务供应商了.问题在于交互式3D像素流送是一种新兴技术,因此很难知道要问供应商的正确问题.在开始使用之前,这里有7个问题,您应该从候选 ...
- [论文分享] DHP: Differentiable Meta Pruning via HyperNetworks
[论文分享] DHP: Differentiable Meta Pruning via HyperNetworks authors: Yawei Li1, Shuhang Gu, etc. comme ...