behavior planning——11 create a cost function speed penalty
A key part of getting transitions to happen when we want them to is the design of reasonable cost functions.
we want to penalize and reward the right things. I am going to work through an example of one way you might think about
designing a cost function. let is consider how we would design a cost function for vehicle speed. on one hand ,we want to
get to our destination quickly, but on the other hand, we do not want to break the law. an essential quantity we have to control is the desired velocity of the car.
some velocities are more beneficial,some are even illegal.let is fill in this graph and try to assign some costs to every velocity.
for the sake of simplicity, let is assume that all of the cost functions will have an output between zero and one.
We will adjust the importance of each cost function later by adjusting the weithts.
let is say the speed limit for the road we are on is here, well ,we know that if we ate going well above the speed limit, that should be maximum cost.
and maybe we want to set an ideal zero cost speed thst is slightly below the speed limit so that we have some buffer.
and then we can think about how much we want to penalize not moving at all.obviously ,not moving is bad. but maybe not as bad as breaking the speed limit, so we would put it here.
to keep it simple, we could just say there is a linear cost between zero and the target speed.

and since breaking the law is a binary thing, let is just say any speed greater than or equal the speed limit has maximal cost. And again, we can arbitrarily connect these points with a linear funcion and the flat maximum cost for anything above
the speed limit. now ,in practice ,we might actually want to parametrize some of these quantities so that we could later adjust them until we got the right behavior.
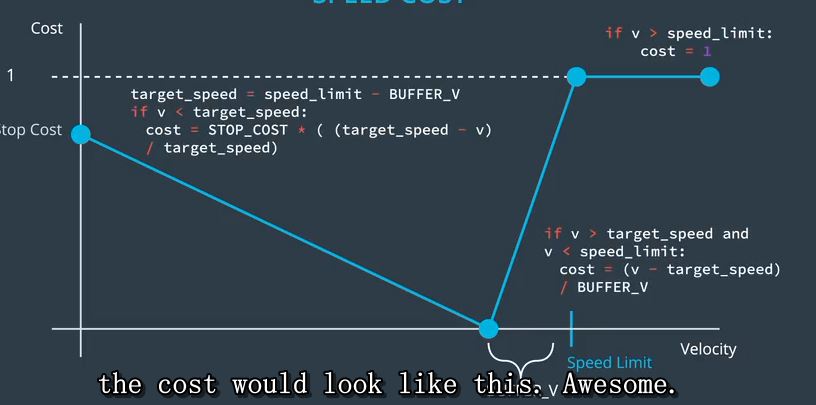
so first, we might define a parameter called stop cost for the zero-velocity case and a parameter called buffer velocity which would probably be a few miles per hour.
then, out overall cost function has three domains. If we are going less than the target speed, the cost function would look like this.

if we are above the speed limit, the cost is just one.And if we are between the cost would look like this .
behavior planning——11 create a cost function speed penalty的更多相关文章
- behavior planning——14.implement a cost function in C++
n most situations, a single cost function will not be sufficient to produce complex vehicle behavior ...
- behavior planning——13. implement a cost function in C++
In the previous quizzes, you designed a cost function to choose a lane when trying to reach a goal i ...
- behavior planning——15.cost function design weightTweaking
Designing cost functions is difficult and getting them all to cooperate to produce reasionable vehic ...
- machine learning(11) -- classification: advanced optimization 去求cost function最小值的方法
其它的比gradient descent快, 在某些场合得到广泛应用的求cost function的最小值的方法 when have a large machine learning problem, ...
- behavior planning——12.example cost funtion -lane change penalty
In the image above, the blue self driving car (bottom left) is trying to get to the goal (gold sta ...
- logistic回归具体解释(二):损失函数(cost function)具体解释
有监督学习 机器学习分为有监督学习,无监督学习,半监督学习.强化学习.对于逻辑回归来说,就是一种典型的有监督学习. 既然是有监督学习,训练集自然能够用例如以下方式表述: {(x1,y1),(x2,y2 ...
- Linear regression with one variable - Cost function intuition I
摘要: 本文是吴恩达 (Andrew Ng)老师<机器学习>课程,第二章<单变量线性回归>中第8课时<代价函数的直观认识 - 1>的视频原文字幕.为本人在视频学习过 ...
- behavior planning——10 behaior planning pseudocode
One way to implement a transition function is by generating rough trajectories for each accessible & ...
- loss function与cost function
实际上,代价函数(cost function)和损失函数(loss function 亦称为 error function)是同义的.它们都是事先定义一个假设函数(hypothesis),通过训练集由 ...
随机推荐
- 洛谷P1062 数列 [2017年6月计划 数论03]
P1062 数列 题目描述 给定一个正整数k(3≤k≤15),把所有k的方幂及所有有限个互不相等的k的方幂之和构成一个递增的序列,例如,当k=3时,这个序列是: 1,3,4,9,10,12,13,… ...
- python正则表达式应用 定义一个函数,求字符串中出现的所有整数之和
- python 常规字符匹配
- 51nod1040 矩阵相乘结果的判断
给出三个N*N的矩阵A, B, C,问A * B是否等于C?Input第1行,1个数N.(0 <= N <= 500)第2 - N + 1行:每行N个数,对应矩阵A的元素.(0 <= ...
- CMD格式数据表输出语句
mysql --default-character-set=latin1 -uroot -p
- 2019-10-26-Inno-Setup-安装包脚本-Run-的-Flags-标记
title author date CreateTime categories Inno Setup 安装包脚本 Run 的 Flags 标记 lindexi 2019-10-26 08:42:39 ...
- bzoj1231 混乱的奶牛
Description 混乱的奶牛 [Don Piele, 2007] Farmer John的N(4 <= N <= 16)头奶牛中的每一头都有一个唯一的编号S_i (1 <= S ...
- Resource Management in View Controllers
UIViewController生命周期 UIViewControl是IOS程序中的一个重要组成部分,扮演者一个大管家的身份,管理着程序中的众多视图,今天看看了官方文档并做了如下一些简单的记录: 何时 ...
- 洛谷P3455 [POI2007]ZAP-Queries (莫比乌斯反演)
题意:求$\sum_{i=1}^{a}\sum_{j=1}^{b}[gcd(i,j)==d]$(1<=a,b,d<=50000). 很套路的莫比乌斯反演. $\sum_{i=1}^{n}\ ...
- 【IOS】异常捕获 拒绝闪退 让应用从容的崩溃 UncaughtExceptionHandler
尽管大家都不愿意看到程序崩溃,但可能崩溃是每一个应用必须面对的现实.既然崩溃已经发生.无法阻挡了.那我们就让它崩也崩得淡定点吧. IOS SDK中提供了一个现成的函数 NSSetUncaughtExc ...