ROS学习(八)—— 理解ROS服务和参数
一、ROS 服务
服务(services)是节点之间通讯的另一种方式。服务允许节点发送请求(request) 并获得一个响应(response)
二、rosservice
1、用途
rosservice可以很轻松的使用 ROS 客户端/服务器框架提供的服务。
2、语法:
rosservice list print information about active services 输出可用的服务信息
rosservice call call the service with the provided args 调用服务
rosservice type print service type 打印服务参数类型
rosservice find find services by service type
rosservice uri print service ROSRPC uri
3、rosservice list
rosservice list
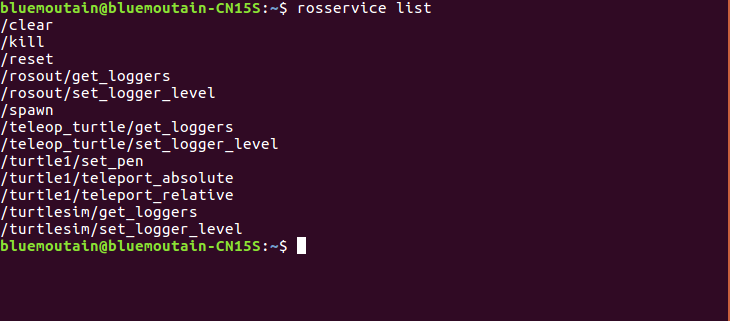
rosservice可以很轻松的使用 ROS 客户端/服务器框架提供的服务。
-->
4、rosservice type
(1)语法:
rosservice type [service]
(2)demo
rosservice type /clear
返回std_srvs/Empty
5、rosservice call
(1)语法:
rosservice call [service] [args]
(2)demo:
rosservice call /clear
正如我们所期待的,服务清除了turtlesim_node的背景上的轨迹。
(3)demo2:
rosservice type /spawn| rossrv show
返回:
float32 x
float32 y
float32 theta
string name
---
string name
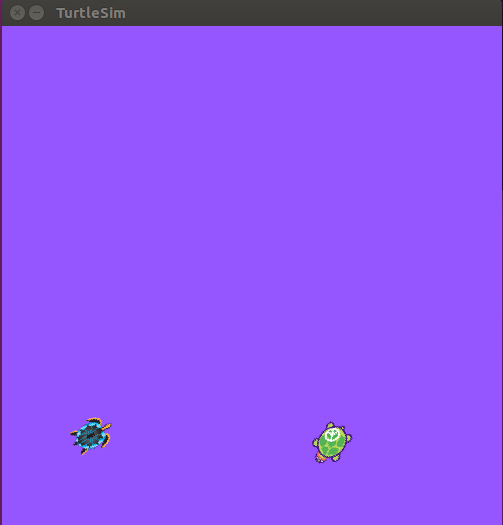
然后我们再创建一个乌龟,命令为:
rosservice call /spawn 0.2 ""
返回给我们新的乌龟的名字:
name: turtle2
三、rosparam
rosparam使得我们能够存储并操作ROS 参数服务器(Parameter Server)上的数据。参数服务器能够存储整型、浮点、布尔、字符串、字典和列表等数据类型。rosparam使用YAML标记语言的语法。一般而言,YAML的表述很自然:1 是整型, 1.0 是浮点型, one是字符串, true是布尔, [1, 2, 3]是整型列表, {a: b, c: d}是字典. rosparam有很多指令可以用来操作参数,如下所示:
1、用法:
rosparam set set parameter
rosparam get get parameter
rosparam load load parameters from file
rosparam dump dump parameters to file
rosparam delete delete parameter
rosparam list list parameter names
2、rosparam list
rosparam list
我们可以看到服务器参数上的参数:
/background_b
/background_g
/background_r
/roslaunch/uris/aqy:51932
/run_id
3、使用rosparam set和rosparam get
(1)语法:
rosparam set [param_name]
rosparam get [param_name]
(2)demo:改变背景颜色
rosparam set /background_r
rosservice call /clear
(3)得到全部参数
rosparam get /
4、参数保存和载入
(1)语法:
rosparam dump [file_name] [namespace]
rosparam load [file_name] [namespace]
(2)demo:
保存:
rosparam dump params.yaml
载入:可以载入到另一个名字空间(好像可以随便取,即可生成新的名字空间)
rosparam load params.yaml copy
rosparam get /copy/background_b
ROS学习(八)—— 理解ROS服务和参数的更多相关文章
- ROS学习笔记7-理解服务(services)和参数(parameter)
本文内容来自官方wiki:http://wiki.ros.org/ROS/Tutorials/UnderstandingServicesParams ROS服务(service)服务也是ROS中一种通 ...
- JVM学习八:常用JVM配置参数
前面学习的都是和类加载相关的知识,接下来学习的则和GC相关的知识,都是JVM的几个重点块. 零.在IDE的后台打印GC日志: 既然学习JVM,阅读GC日志是处理Java虚拟机内存问题的基础技能,它只是 ...
- Linux系统学习 八、SSH服务—SSH远程管理服务
1.SSH简介 ssh(安全外壳协议)是Secure Shell的缩写,是建立在应用层和传输层基础上的安全协议.传输的时候是经过加密的,防止信息泄露,比telnet(明文传递)要安全很多. ftp安装 ...
- 理解ros服务和参数 ---- 7
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 周学伟 Description: 本教程介绍了ROS 服务和参数的知识,以及命令行工具rosservi ...
- ROS学习手记 - 5 理解ROS中的基本概念_Services and Parameters
上一节完成了对nodes, Topic的理解,再深入一步: Services and Parameters 我不理解为何 ROS wiki 要把service与parameter放在一起介绍, 很想分 ...
- ROS学习笔记(一) # ROS参数服务器
参考 roscpp/Overview/Parameter Server 0. 概述 ROS参数服务器能够保存 string, int, float, double, bool, list, dicti ...
- ROS学习笔记八:基于Qt搭建ROS开发环境
1 前言 本文介绍一种Qt下进行ROS开发的完美方案,使用的是ros-industrial的Levi-Armstrong在2015年12月开发的一个Qt插件ros_qtc_plugin,这个插件使得Q ...
- ROS学习笔记9-创建ros消息和服务
该节内容主要来自于官方文档的两个小节:1.使用rosed来编辑2.创建ros消息的服务 先来看rosed: rosedrosed命令是rosbash的一部分,使用rosed可以直接编辑包中的一个文件, ...
- SLAM+语音机器人DIY系列:(二)ROS入门——8.理解roslaunch在大型项目中的作用
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS知识(2)----理解ROS系统结构
学习新事物,方法高于技术本身,如果没有把握"BIG PICTURE"的话很难理解进去.通过以下几点进行理解ROS: ROS实际上不是操作系统,他只是一个通信的框架,一个代码管理的架 ...
随机推荐
- 条件随机场(CRF)理论及应用
http://x-algo.cn/index.php/2016/02/15/conditional-random-field-crf-theory-and-implementation/ 条件随机场( ...
- Linux下逻辑地址-线性地址-物理地址图解(转)
一.逻辑地址转线性地址 机器语言指令中出现的内存地址,都是逻辑地址,需要转换成线性地址,再经过MMU(CPU中的内存管理单元)转换成物理地址才能够被访问到. 我们写个最简单的hello world程序 ...
- PKU-2104-K-th Number
K-th Number Time Limit: 20000MS Memory Limit: 65536K Total Submissions: 36045 Accepted: 11522 Ca ...
- How to Build a Search Page with Elasticsearch and .NET
Although SQL Server's Full-Text search is good for searching text that is within a database, there a ...
- sublime同步文件与siderbar
有时候,打开了sider bar,想和Eclipse.idea一样,每打开一个tab,就可以在左侧的sider bar 目录上面看到我当前的位置,于是找到了一个插件. SyncedSideBar 安装 ...
- 抽屉柜式MCC柜中PROFIBUS设备推荐波特率及相应传输距离
抽屉柜式MCC柜中PROFIBUS设备推荐波特率及相应传输距离.例如以下图所看到的: watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQv/font/5a6L5L ...
- [Canvas]走近的女孩
动态效果请点此下载文件并使用Chrome或者FireFox浏览器观看. 图例: 代码: <!DOCTYPE html> <html lang="utf-8"> ...
- Discuz常见小问题-如何为每个板块设置不同的图标
进入后台的论坛-版块管理,选中要修改图标的板块,点击后面的编辑 在板块图标中找到图标文件,一般是PNG或者GIF,大小为32X32,提交之后效果如下
- Linux环境下网络编程杂谈《转》
今天我们说说“Pre-网络编程”.内容比较杂,但都是在做网络应用程序开发过程中经常要遇到的问题. 一.大端.小端和网络字节序 小端字节序:little-endian,将低字节存放在内存的起始地址: 大 ...
- Redis 操作数据
展现最新数据 Web应用常常要展现最新数据,就会根据时间对数据排序: SELECT * FROM foo WHERE ... ORDER BY time DESC LIMIT 10 随着数据的增加,问 ...