VPython—旋转坐标系
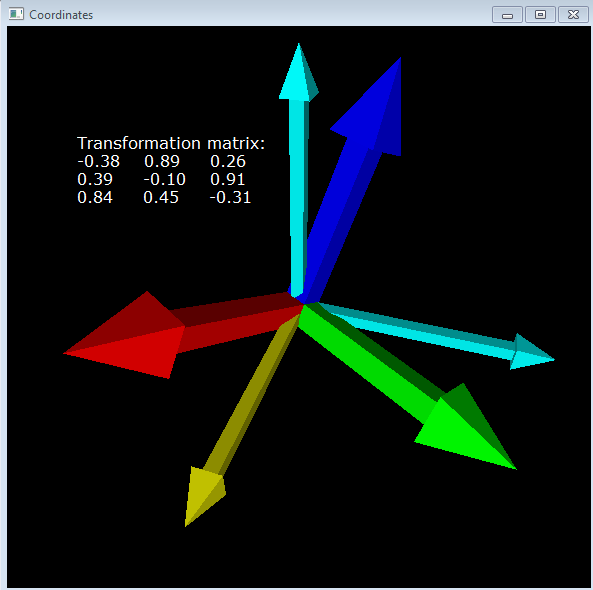
使用arrow( )创建三个坐标轴代表一个坐标系,其中X0-Y0-Z0为参考坐标系(固定不动),X-Y-Z为运动坐标系,这两个坐标系原点重合,运动坐标系可以绕参考坐标系或其自身旋转。在屏幕上输出一个转换矩阵,该矩阵描述了动坐标系相对于参考坐标系的姿态,矩阵第一列表示动坐标系的X轴在参考坐标系中的方向,第二列表示动坐标系的Y轴在参考坐标系中的方向,第二列表示动坐标系的Z轴在参考坐标系中的方向。显而易见,当两个坐标系姿态一致时,转换矩阵为3阶单位矩阵。
程序中按键盘的上下方向坐标系绕Y轴旋转,按左右键坐标系绕Z轴旋转,按W,S键绕X轴旋转。由于本例子使用的是VPython5,对于键盘事件只支持轮询方式检测,即在while循环中不停地检测是否有按键按下。在最新的VPython6中支持了键盘事件响应,可以自定义事件响应的回掉函数。
对于绕Z轴旋转这一动作来说,可以使绕参考坐标系的Z轴,也可以是绕动坐标系自身的Z轴。绕自身坐标轴旋转的角度称为欧拉角,而飞行器和航海中常用的RPY角(Roll-Pitch-Yaw:横滚、俯仰、偏航)是绕固定坐标系旋转。

对于旋转三个坐标轴来说可以将其放在一个自定义的旋转函数中,每次旋转只需调用该函数;也可以将其添加进同一个frame,旋转frame时frame中的所有对象都会跟着一起旋转。注意:下面的程序中旋转frame时是绕着参考坐标系的坐标轴旋转的,调用自定义的旋转函数旋转坐标系时是按照动坐标系的坐标轴旋转的。
# -*- coding: utf-8 -*-
from visual import * scene.title = 'Coordinates' # 设置窗口标题
scene.width = 600 # 设置窗口宽度和高度
scene.height = 600
scene.forward = (-1,-1,-1) # 设置camera视线方向 # Create a frame object,group objects together to make a composite object
f = frame() # 定义参考坐标系
X0 = arrow(pos=(0,0,0), axis=(1,0,0), color=color.cyan, shaftwidth=0.05)
Y0 = arrow(pos=(0,0,0), axis=(0,1,0), color=color.cyan, shaftwidth=0.05)
Z0 = arrow(pos=(0,0,0), axis=(0,0,1), color=color.yellow,shaftwidth=0.05) # 定义运动坐标系的X,Y,Z轴
X = arrow(frame = f, pos=(0,0,0), axis=(1,0,0), color=(1,0,0), shaftwidth=0.1)
Y = arrow(frame = f, pos=(0,0,0), axis=(0,1,0), color=(0,1,0), shaftwidth=0.1)
Z = arrow(frame = f, pos=(0,0,0), axis=(0,0,1), color=(0,0,1), shaftwidth=0.1) tf_str = 'Transformation matrix:\n%-8.2f %-8.2f %-8.2f\n%-8.2f %-8.2f %-8.2f\n%-8.2f %-8.2f %-8.2f\n'%(1,0,0,0,1,0,0,0,1) # With the label object you can display 2D text in a box, and the label always faces forward
info = label(pos=(-0.5,0.5,0), text = tf_str, box=False, opacity=0, height=16) delta_angle = radians(2) # 2° def rotate_axis(angle, axis, origin):
X.rotate(angle=angle, axis=axis, origin=origin)
Y.rotate(angle=angle, axis=axis, origin=origin)
Z.rotate(angle=angle, axis=axis, origin=origin) while True:
rate(100) if scene.kb.keys: # event waiting to be processed?
s = scene.kb.getkey() # get keyboard info # 按左右箭头绕Z轴旋转
if s == 'left':
#f.rotate(angle=delta_angle, axis=Z.axis, origin=(0,0,0))
rotate_axis(angle = delta_angle, axis = Z.axis, origin = (0,0,0))
elif s == 'right':
#f.rotate(angle=-delta_angle, axis=Z.axis, origin=(0,0,0))
rotate_axis(angle = -delta_angle, axis = Z.axis, origin = (0,0,0)) # 按上下箭头绕Y轴旋转
if s == 'up':
#f.rotate(angle=delta_angle, axis=Y.axis, origin=(0,0,0))
rotate_axis(angle = delta_angle, axis = Y.axis, origin = (0,0,0))
elif s == 'down':
#f.rotate(angle=-delta_angle, axis=Y.axis, origin=(0,0,0))
rotate_axis(angle = -delta_angle, axis = Y.axis, origin = (0,0,0)) # 按w,s键绕X轴旋转
if s == 'w':
#f.rotate(angle=delta_angle, axis=X.axis, origin=(0,0,0))
rotate_axis(angle = delta_angle, axis = X.axis, origin = (0,0,0))
elif s == 's':
#f.rotate(angle=-delta_angle, axis=X.axis, origin=(0,0,0))
rotate_axis(angle = -delta_angle, axis = X.axis, origin = (0,0,0)) info.text = 'Transformation matrix:\n%-8.2f %-8.2f %-8.2f\n%-8.2f %-8.2f %-8.2f\n%-8.2f %-8.2f %-8.2f\n'\
% (X.axis[0],Y.axis[0],Z.axis[0],\
X.axis[1],Y.axis[1],Z.axis[1],\
X.axis[2],Y.axis[2],Z.axis[2])
VPython—旋转坐标系的更多相关文章
- 【bzoj3170】[Tjoi 2013]松鼠聚会 旋转坐标系
题目描述 有N个小松鼠,它们的家用一个点x,y表示,两个点的距离定义为:点(x,y)和它周围的8个点即上下左右四个点和对角的四个点,距离为1.现在N个松鼠要走到一个松鼠家去,求走过的最短距离. 输入 ...
- 【bzoj2989】数列 KD-tree+旋转坐标系
题目描述 给定一个长度为n的正整数数列a[i]. 定义2个位置的graze值为两者位置差与数值差的和,即graze(x,y)=|x-y|+|a[x]-a[y]|. 2种操作(k都是正整数): 1.Mo ...
- [bzoj2989]数列_KD-Tree_旋转坐标系
数列 bzoj-2989 题目大意:题目链接. 注释:略. 想法:显然,我们用x和a[x]两个值建立笛卡尔坐标系. 两个点之间的距离为曼哈顿距离. 修改操作就是插入... 查询操作就是查询一个点周围的 ...
- [SDOI2018]物理实验 set,扫描线,旋转坐标系
[SDOI2018]物理实验 set,扫描线,旋转坐标系 链接 loj 思路 先将导轨移到原点,然后旋转坐标系,参考博客. 然后分线段,每段的贡献(三角函数值)求出来,用自己喜欢的平衡树,我选set. ...
- HDU 6538 Neko and quadrilateral(极角排序+旋转坐标系)
这道题简直太好了,对于计算几何选手需要掌握的一个方法. 首先对于求解四边形面积,我们可以将四边形按对角线划分成两个三角形,显然此时四边形的面积最大最小值就变成了求解里这个对角线最近最远的点对. 对于此 ...
- Android canvas rotate():平移旋转坐标系至任意原点任意角度-------附:android反三角函数小结
自然状态下,坐标系以屏幕左上角为原点,向右是x正轴,向下是y正轴.现在要使坐标系的原点平移至任一点O(x,y),且旋转a角度,如何实现? 交待下我的问题背景,已知屏幕上有两点p1和p2,构成直线l.我 ...
- hdu4998 旋转坐标系
题意: 一开始的时候有一个坐标系(正常的),然后有n个操作,每个操作是 x y d,意思是当前坐标系围绕x,y点逆时针旋转d度,最后让你输出三个数x y d,把这n个操作的最后结果,用一步 ...
- 【bzoj3210】花神的浇花集会 旋转坐标系
题目描述 在花老师的指导下,每周4都有一个集会活动,俗称“浇水”活动. 具体浇水活动详情请见BZOJ3153 但这不是重点 花神出了好多题,每道题都有两个参考系数:代码难度和算法难度 花神为了准备浇花 ...
- 【bzoj1604】[Usaco2008 Open]Cow Neighborhoods 奶牛的邻居 旋转坐标系+并查集+Treap/STL-set
题目描述 了解奶牛们的人都知道,奶牛喜欢成群结队.观察约翰的N(1≤N≤100000)只奶牛,你会发现她们已经结成了几个“群”.每只奶牛在吃草的时候有一个独一无二的位置坐标Xi,Yi(l≤Xi,Yi≤ ...
随机推荐
- android 项目学习随笔十六( 广告轮播条播放)
广告轮播条播放 if (mHandler == null) {//在此初始化mHandler , 保证消息不重复发送 mHandler = new Handler() { public void ha ...
- 安装qt5.3.2后,qtcreator在ubuntu 11.04无法启动的问题
在官方网站下载.run文件安装后,qtcreator启动失败,然后找到命令行启动,失败原因如下: shr@shr-Sieyuan:~/Qt5.3.2/Tools/QtCreator/bin$ ./qt ...
- innodb内部的并发线程
1. innodb_thread_concurrency innodb有一系列的计数器来统计和控制内部的工作线程.其中最重要的一个是innodb_thread_concurrency,和它相关的inn ...
- Thinkphp用exp表达式执行mysql语句,查询某字段不为空is not null,自动增值
Thinkphp用exp表达式执行mysql语句,查询某字段不为空is not null,自动增值 Thinkphp 的文档经常不够完整的表达MYSQL的各种组合,is not null在thinkp ...
- win32 Ui 编程 收集
---恢复内容开始--- windows sdk编程系列---- 通用控件 http://www.cnblogs.com/MoreNotepad-plus-plus/articles/3164534. ...
- arduino 红外遥控器控制LED灯
/* 日期:2016.9.1 功能:红外遥控器控制LED灯 开,关,闪烁,呼吸 元件: 跳线公公头 * 5 led 220欧电阻 红外接收管,红外遥控 接线: 红外灯面向自己从左到右分别接 IO3 , ...
- Binary Tree Level Order Traversal II
/** * Definition for a binary tree node. * struct TreeNode { * int val; * TreeNode *left; * TreeNode ...
- IE6不支持CSS的属性选择器
input[type="text"] { width: 50px; } 测试IE6不生效,而IE7以上浏览器则没问题
- PHP编写的图片验证码类文件分享方法
适用于自定义的验证码类! <?php/* * To change this license header, choose License Headers in Project Propertie ...
- iOS-网址集
0. 在线工具 http://tool.lu 1. iOS学习笔记汇总链接 https://blog.6ag.cn/533.html 2.iOS开发内购全套图文教程http://mp.weixin.q ...