莫烦tensorflow学习记录 (7)循环神经网络 RNN & LSTM
莫凡大佬的原文章https://mofanpy.com/tutorials/machine-learning/tensorflow/intro-RNN/
RNN 的用途
可以读取数据中的顺序,获取顺序的特点, 对于预测, 顺序排列是多么重要。 我们可以预测下一个按照一定顺序排列的字, 但是打乱顺序, 我们就没办法分析自己到底在说什么了。
序列数据
我们想象现在有一组序列数据 data 0,1,2,3. 在当预测 result0 的时候,我们基于的是 data0, 同样在预测其他数据的时候, 我们也都只单单基于单个的数据. 每次使用的神经网络都是同一个 NN. 不过这些数据是有关联 顺序的 , 就像在厨房做菜, 酱料 A要比酱料 B 早放, 不然就串味了. 所以普通的神经网络结构并不能让 NN 了解这些数据之间的关联.
处理序列数据的神经网络
如何让序列数据之间的关联也被分析呢?只能像人一样具有记忆能力,让神经网络也具备这种记住之前发生的事的能力。再分析 Data0 的时候, 我们把分析结果存入记忆start0. 然后当分析 data1的时候, NN会产生新的记忆start2, 但是新记忆和老记忆是没有联系的. 我们就简单的把老记忆调用过来, 一起分析. 如果继续分析更多的有序数据 , RNN就会把之前的记忆都累积起来, 一起分析。
RNN 的弊端
之前我们说RNN具有记忆能力但一般的RNN比较健忘,根据之前的说法RNN会记住 Data0; data1等等之后所有的start,太多了就记不清了。
为什么会这样呢?
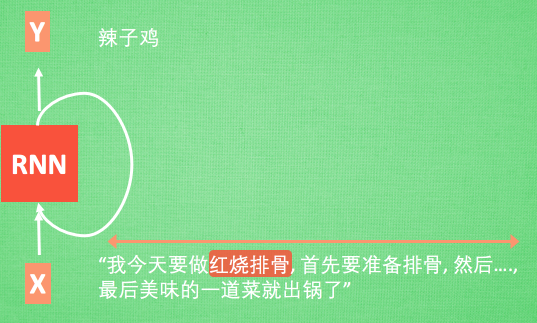
想像现在有这样一个 RNN, 他的输入值是一句话: ‘我今天要做红烧排骨, 首先要准备排骨, 然后…., 最后美味的一道菜就出锅了’, shua ~ 说着说着就流口水了. 现在请 RNN 来分析, 我今天做的到底是什么菜呢. RNN可能会给出“辣子鸡”这个答案. 由于判断失误, RNN就要开始学习 这个长序列 X 和 ‘红烧排骨’ 的关系 , 而RNN需要的关键信息 ”红烧排骨”却出现在句子开头,
再来看看 RNN是怎样学习的吧. 红烧排骨这个信息原的记忆要进过长途跋涉才能抵达最后一个时间点. 然后我们得到误差, 而且在 反向传递 得到的误差的时候, 他在每一步都会 乘以一个自己的参数 W. 如果这个 W 是一个小于1 的数, 比如0.9. 这个0.9 不断乘以误差, 误差传到初始时间点也会是一个接近于零的数, 所以对于初始时刻, 误差相当于就消失了. 我们把这个问题叫做梯度消失或者梯度弥散 Gradient vanishing. 反之如果 W 是一个大于1 的数, 比如1.1 不断累乘, 则到最后变成了无穷大的数, RNN被这无穷大的数撑死了, 这种情况我们叫做剃度爆炸, Gradient exploding. 这就是普通 RNN 没有办法回忆起久远记忆的原因.


分类例子
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data # 数据
mnist = input_data.read_data_sets('MNIST_data', one_hot=True) # 超参 hyperparameters
lr = 0.001 # 学习率
training_iters = 100000 # train step 上限
batch_size = 128 n_inputs = 28 # MNIST data input (img shape: 28*28)
n_steps = 28 # time steps 一次输入28个像素(一整行),共28次(共28行)
n_hidden_units = 128 # 隐藏层中的神经元 neurons in hidden layer
n_classes = 10 # MNIST classes (0-9 digits) # 为网络输入定义占位符
x = tf.placeholder(tf.float32, [None, n_steps, n_inputs])
y = tf.placeholder(tf.float32, [None, n_classes]) # 定义权重 weights 和 biases
weights = {
#(28,128)
"in": tf.Variable(tf.random_normal([n_inputs, n_hidden_units])),
#(128,10)
"out": tf.Variable(tf.random_normal([n_hidden_units, n_classes]))
}
biases = {
# (128, )
'in': tf.Variable(tf.constant(0.1, shape=[n_hidden_units, ])),
# (10, )
'out': tf.Variable(tf.constant(0.1, shape=[n_classes, ]))
} # 接着开始定义 RNN 主体结构, 这个 RNN 总共有 3 个组成部分
# ( input_layer, cell, output_layer). def RNN(X, weights, biases): # 首先我们先定义 input_layer:
# 原始的 X 是 3 维数据, 我们需要把它变成 2 维数据才能使用 weights 的矩阵乘法
# X ==> (128 batches * 28 steps, 28 inputs)
X = tf.reshape(X,[-1, n_inputs]) # X_in = W*X + b
# ==>(128 natch* 28 steps, 128 hidden)
X_in = tf.matmul(X, weights['in']) + biases['in'] # X_in ==> (128 batch, 28 steps, 128 hidden) 换回三维
X_in = tf.reshape(X_in,[-1, n_steps, n_hidden_units]) # cell
##########################################
# 因Tensorflow版本升级原因, state_is_tuple = True将在之后的版本中变为默认.
# 对于lstm来说, state可被分为(c_state, h_state).
LSTM_cell = tf.contrib.rnn.BasicLSTMCell(n_hidden_units, forget_bias=1.0, state_is_tuple=True)
init_state = LSTM_cell.zero_state(batch_size, dtype=tf.float32) # 初始化全零 state
# 使用tf.nn.dynamic_rnn(cell, inputs), 我们要确定inputs的格式.
# tf.nn.dynamic_rnn中的time_major参数会针对不同inputs格式有不同的值.
# 如果inputs为(batches, steps, inputs) == > time_major = False;
# 如果inputs为(steps, batches, inputs) == > time_major = True;
outputs, final_state = tf.nn.dynamic_rnn(LSTM_cell, X_in, initial_state=init_state, time_major=False) # hidden layer for output as the final results
############################################# 有两个方法
#法一: results = tf.matmul(final_state[1], weights['out']) + biases['out']
# or 法二
outputs = tf.unstack(tf.transpose(outputs, [1,0,2])) # transpose是进行三维张量转置,102代表第一第二维度交换,利用transpose将outputs的三个维度整理变成(n_steps,batch_size,output)
results = tf.matmul(outputs[-1], weights['out']) + biases['out'] # shape = (128, 10) return results pred = RNN(x, weights, biases)
cost = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(logits=pred, labels=y))
train_op = tf.train.AdamOptimizer(lr).minimize(cost) # 利用tf.argmax()按行求出真实值y、预测值pred最大值的下标,
# 用tf.equal()求出真实值和预测值相等的数量,也就是预测结果正确的数量,
# tf.argmax()和tf.equal()一般是结合着用。
correct_pred = tf.equal(tf.argmax(pred, 1), tf.argmax(y, 1))
accuracy = tf.reduce_mean(tf.cast(correct_pred, tf.float32)) init = tf.global_variables_initializer()
saver = tf.train.Saver(max_to_keep=1) # 创建saver对象来保存训练的模型 with tf.Session() as sess: sess.run(init)
step = 0
max_acc = 0
is_train = True
if is_train:
while step * batch_size < training_iters:
batch_xs, batch_ys = mnist.train.next_batch(batch_size)
batch_xs = batch_xs.reshape([batch_size, n_steps, n_inputs])
sess.run([train_op], feed_dict={
x: batch_xs,
y: batch_ys,
})
if step % 20 == 0:
test_acc = sess.run(accuracy, feed_dict={
x: batch_xs,
y: batch_ys,
})
print(test_acc) # 计算当前模型在测试集上准确率,最终保存准确率最高的一次模型
if test_acc > max_acc:
max_acc = test_acc
saver.save(sess, './ckptRNN/mnistRNNLSTM.ckpt', global_step=step)
step += 1
回归例子
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd BATCH_START = 0 # 建立 batch data 时候的 index
TIME_STEPS = 20 # 通过时间的反向传播time_steps backpropagation through time 的 time_steps
BATCH_SIZE = 50
INPUT_SIZE = 1 # sin 数据输入 size
OUTPUT_SIZE = 1 # cos 数据输出 size
CELL_SIZE = 10 # RNN 的 hidden unit size
LR = 0.006 # learning rate # 捏一个数据
def get_batch():
global BATCH_START, TIME_STEPS
# xs shape (50batch, 20steps)
xs = np.arange(BATCH_START, BATCH_START+TIME_STEPS*BATCH_SIZE).reshape((BATCH_SIZE, TIME_STEPS)) / (10*np.pi)
seq = np.sin(xs)
res = np.cos(xs)
BATCH_START += TIME_STEPS
# plt.plot(xs[0, :], res[0, :], 'r', xs[0, :], seq[0, :], 'b--')
# plt.show()
# returned seq, res and xs: shape (batch, step, input)
return [seq[:, :, np.newaxis], res[:, :, np.newaxis], xs] class LSTMRNN(object):
def __init__(self, n_steps, input_size, output_size, cell_size, batch_size):
self.n_steps = n_steps # cell的个数
self.input_size = input_size #每一个cell输入的长度
self.output_size = output_size
self.cell_size = cell_size # 每一个RNNcell隐藏神经元数量
self.batch_size = batch_size
with tf.name_scope('inputs'):
self.xs = tf.placeholder(tf.float32, [None, n_steps, input_size], name='xs')
self.ys = tf.placeholder(tf.float32, [None, n_steps, output_size], name='ys')
with tf.variable_scope('in_hidden'):
self.add_input_layer()
with tf.variable_scope('LSTM_cell'):
self.add_cell()
with tf.variable_scope('out_hidden'):
self.add_output_layer()
with tf.name_scope('cost'):
self.compute_cost()
with tf.name_scope('train'):
self.train_op = tf.train.AdamOptimizer(LR).minimize(self.cost) def add_input_layer(self):
l_in_x = tf.reshape(self.xs, [-1, self.input_size], name='2_2D') # (batch*n_step, in_size) (1000,1)
# Ws (in_size, cell_size) (10,1)
Ws_in = self._weight_variable([self.input_size, self.cell_size])
# bs (cell_size, ) (10,)
bs_in = self._bias_variable([self.cell_size, ])
# l_in_y = (batch * n_steps, cell_size) (1000,10)
with tf.name_scope('Wx_plus_b'):
l_in_y = tf.matmul(l_in_x, Ws_in) + bs_in
# reshape l_in_y ==> (batch, n_steps, cell_size) (50,20,10)
self.l_in_y = tf.reshape(l_in_y, [-1, self.n_steps, self.cell_size], name='2_3D') def add_cell(self):
lstm_cell = tf.contrib.rnn.BasicLSTMCell(self.cell_size, forget_bias=1.0, state_is_tuple=True)
with tf.name_scope('initial_state'):
self.cell_init_state = lstm_cell.zero_state(self.batch_size, dtype=tf.float32)
self.cell_outputs, self.cell_final_state = tf.nn.dynamic_rnn(
lstm_cell,
self.l_in_y,
initial_state=self.cell_init_state,
time_major=False
) def add_output_layer(self):
# shape = (batch * steps, cell_size) (50*20,10)
l_out_x = tf.reshape(self.cell_outputs, [-1, self.cell_size], name='2_2D')
Ws_out = self._weight_variable([self.cell_size, self.output_size])
bs_out = self._bias_variable([self.output_size, ])
# shape = (batch * steps, output_size)
with tf.name_scope('Wx_plus_b'):
self.pred = tf.matmul(l_out_x, Ws_out) + bs_out def compute_cost(self):
losses = tf.contrib.legacy_seq2seq.sequence_loss_by_example(
[tf.reshape(self.pred, [-1], name='reshape_pred')],
[tf.reshape(self.ys, [-1], name='reshape_target')],
[tf.ones([self.batch_size * self.n_steps], dtype=tf.float32)],
average_across_timesteps=True,
softmax_loss_function=self.ms_error,
name='losses'
)
with tf.name_scope('average_cost'):
self.cost = tf.div(
tf.reduce_sum(losses, name='losses_sum'),
self.batch_size,
name='average_cost')
correct_pred = tf.equal(tf.argmax([tf.reshape(self.pred, [-1])], 1), tf.argmax([tf.reshape(self.ys, [-1])], 1))
tf.summary.scalar('cost', self.cost) @staticmethod
def ms_error(labels, logits):
return tf.square(tf.subtract(labels, logits)) def _weight_variable(self, shape, name='weights'):
initializer = tf.random_normal_initializer(mean=0., stddev=1.,)
return tf.get_variable(shape=shape, initializer=initializer, name=name) def _bias_variable(self, shape, name='biases'):
initializer = tf.constant_initializer(0.1)
return tf.get_variable(name=name, shape=shape, initializer=initializer) if __name__ == '__main__':
# 搭建 LSTMRNN 模型
model = LSTMRNN(TIME_STEPS, INPUT_SIZE, OUTPUT_SIZE, CELL_SIZE, BATCH_SIZE)
sess = tf.Session()
merged = tf.summary.merge_all()
writer = tf.summary.FileWriter("logs", sess.graph) init = tf.global_variables_initializer()
sess.run(init)
# relocate to the local dir and run this line to view it on Chrome (http://0.0.0.0:6006/):
# $ tensorboard --logdir='logs' plt.ion()
plt.show()
# 训练 200 次
for i in range(200):
seq, res, xs = get_batch()# 提取 batch data
if i == 0:
# 初始化 data
feed_dict = {
model.xs: seq,
model.ys: res,
# create initial state
}
else:
feed_dict = {
model.xs: seq,
model.ys: res,
model.cell_init_state: state # 保持 state 的连续性# use last state as the initial state for this run
}
# 训练
_, cost, state, pred = sess.run(
[model.train_op, model.cost, model.cell_final_state, model.pred],
feed_dict=feed_dict) # plotting
plt.plot(xs[0, :], res[0].flatten(), 'r', xs[0, :], pred.flatten()[:TIME_STEPS], 'b--')
plt.ylim((-1.2, 1.2))
plt.draw()
plt.pause(0.3) if i % 20 == 0:
print('cost: ', round(cost, 4))
result = sess.run(merged, feed_dict)
writer.add_summary(result, i)
莫烦tensorflow学习记录 (7)循环神经网络 RNN & LSTM的更多相关文章
- tensorflow学习之(十一)RNN+LSTM神经网络的构造
#RNN 循环神经网络 import tensorflow as tf from tensorflow.examples.tutorials.mnist import input_data tf.se ...
- 深度学习之循环神经网络RNN概述,双向LSTM实现字符识别
深度学习之循环神经网络RNN概述,双向LSTM实现字符识别 2. RNN概述 Recurrent Neural Network - 循环神经网络,最早出现在20世纪80年代,主要是用于时序数据的预测和 ...
- 循环神经网络与LSTM网络
循环神经网络与LSTM网络 循环神经网络RNN 循环神经网络广泛地应用在序列数据上面,如自然语言,语音和其他的序列数据上.序列数据是有很强的次序关系,比如自然语言.通过深度学习关于序列数据的算法要比两 ...
- 循环神经网络之LSTM和GRU
看了一些LSTM的博客,都推荐看colah写的博客<Understanding LSTM Networks> 来学习LSTM,我也找来看了,写得还是比较好懂的,它把LSTM的工作流程从输入 ...
- 通过keras例子理解LSTM 循环神经网络(RNN)
博文的翻译和实践: Understanding Stateful LSTM Recurrent Neural Networks in Python with Keras 正文 一个强大而流行的循环神经 ...
- 循环神经网络RNN模型和长短时记忆系统LSTM
传统DNN或者CNN无法对时间序列上的变化进行建模,即当前的预测只跟当前的输入样本相关,无法建立在时间或者先后顺序上出现在当前样本之前或者之后的样本之间的联系.实际的很多场景中,样本出现的时间顺序非常 ...
- 用纯Python实现循环神经网络RNN向前传播过程(吴恩达DeepLearning.ai作业)
Google TensorFlow程序员点赞的文章! 前言 目录: - 向量表示以及它的维度 - rnn cell - rnn 向前传播 重点关注: - 如何把数据向量化的,它们的维度是怎么来的 ...
- 循环神经网络(RNN, Recurrent Neural Networks)介绍(转载)
循环神经网络(RNN, Recurrent Neural Networks)介绍 这篇文章很多内容是参考:http://www.wildml.com/2015/09/recurrent-neur ...
- 从网络架构方面简析循环神经网络RNN
一.前言 1.1 诞生原因 在普通的前馈神经网络(如多层感知机MLP,卷积神经网络CNN)中,每次的输入都是独立的,即网络的输出依赖且仅依赖于当前输入,与过去一段时间内网络的输出无关.但是在现实生活中 ...
- 循环神经网络(RNN, Recurrent Neural Networks)介绍
原文地址: http://blog.csdn.net/heyongluoyao8/article/details/48636251# 循环神经网络(RNN, Recurrent Neural Netw ...
随机推荐
- 电脑开机时报错No Bootable Device找不到索引的解决方法
本文介绍笔记本电脑出现No Bootable Device错误提示,且无法开机的多种解决办法. 1 问题产生 最近,笔记本电脑正在正常使用时,突然蓝屏,出现你的设备遇到问题,需要重启.的提示: ...
- mmdeploy源码安装 (转换faster rcnn r50/yolox为tensorrt,并用mmdeploy sdk推理)
mmdeploy源码安装 (转换faster rcnn r50/yolox为tensorrt,并进行推理) 这个系列是一个随笔,是我走过的一些路,有些地方可能不太完善.如果有那个地方没看懂,评论区问就 ...
- 力扣206(java&python)-反转链表(简单)
题目: 给你单链表的头节点 head ,请你反转链表,并返回反转后的链表. 示例1: 输入:head = [1,2,3,4,5] 输出:[5,4,3,2,1] 示例2: 输入:head = [1,2] ...
- 玩转DB里的数据 — 阿里云DMS任务编排之简介和实操
1.任务编排介绍 数据库是企业IT系统里的重要基础设施,里面存储了大量有价值的数据资产,如:交易数据.客户数据.订单数据,等等.其实,数据库在企业里一直扮演着一个数据生产者(Producer)的角色, ...
- Hologres揭秘:如何支持超高QPS在线服务(点查)场景
简介: 本期我们将揭秘Hologres如何支持超高QPS在线服务(点查)场景. Hologres(中文名交互式分析)是阿里云自研的一站式实时数仓,这个云原生系统融合了实时服务和分析大数据的场景,全面兼 ...
- 日志审计携手DDoS防护助力云上安全
简介: 本文主要介绍日志审计结合DDoS防护保障云上业务安全的新实践. 日志审计携手DDoS防护助力云上安全 1 背景介绍 设想一下,此时你正在高速公路上开车去上班,路上还有其他汽车,总体而言,大家 ...
- Morphling:云原生部署 AI , 如何把降本做到极致?
简介: Morphling 本意是游戏 Dota 中的英雄"水人",他可以根据环境要求,通过灵活改变自身形态,优化战斗表现.我们希望通过 Morphling 项目,实现针对机器学 ...
- [PHP] 几个拖慢 PHP 程序/API 运行速度的点
1. 启动.查找 Session 需要一定开销,默认 session.save_handler=files,可以通过修改为 redis 提速. files 的 session 会阻塞请求?https: ...
- dotnet C# 根据椭圆长度和宽度和旋转角计算出椭圆中心点的方法
本文来告诉大家如何根据椭圆长度和宽度和旋转角计算出椭圆中心点的方法 方法很简单,请看代码 /// <summary> /// 辅助进行椭圆点计算的类 /// </summary> ...
- 2018-8-10-WPF-如何画出1像素的线
title author date CreateTime categories WPF 如何画出1像素的线 lindexi 2018-08-10 19:16:53 +0800 2018-2-13 17 ...