基于STM32F103和Cube的输入捕获例程
1.开发环境
(1)Cube5.24
(2)Keil5
(3)STM32F103
2.Cube配置
Cube配置很简单,只要打开TIM4通道1的引脚,设置为输入捕获模式,在配置是高或低电平沿触发
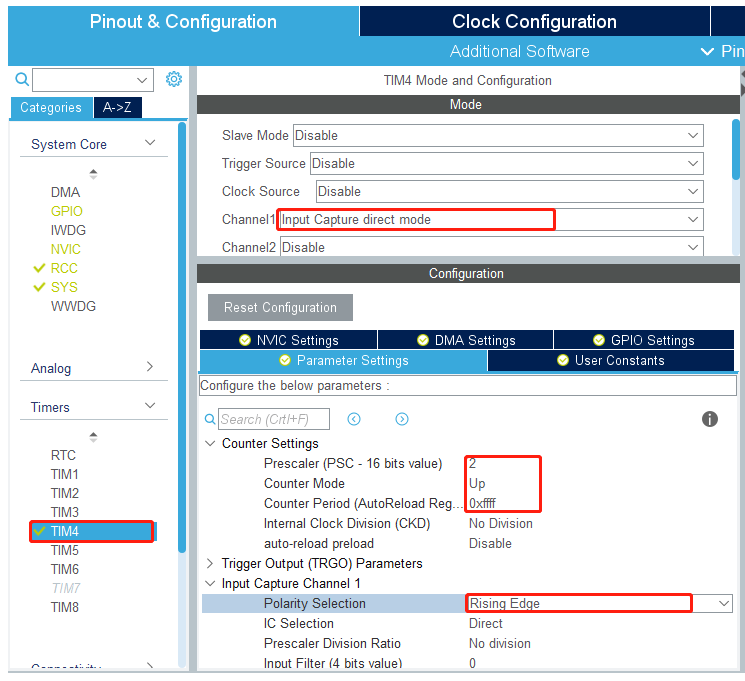
TIM的定时器时钟可根据自己的需要来配置,触发模式为上升沿触发

最后把中断给打开
Cube生成的代码如下:
void MX_TIM4_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {};
TIM_IC_InitTypeDef sConfigIC = {}; htim4.Instance = TIM4;
htim4.Init.Prescaler = ;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 0xffff;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_IC_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = ;
if (HAL_TIM_IC_ConfigChannel(&htim4, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
} } void HAL_TIM_IC_MspInit(TIM_HandleTypeDef* tim_icHandle)
{ GPIO_InitTypeDef GPIO_InitStruct = {};
if(tim_icHandle->Instance==TIM4)
{
/* USER CODE BEGIN TIM4_MspInit 0 */ /* USER CODE END TIM4_MspInit 0 */
/* TIM4 clock enable */
__HAL_RCC_TIM4_CLK_ENABLE(); __HAL_RCC_GPIOD_CLK_ENABLE();
/**TIM4 GPIO Configuration
PD12 ------> TIM4_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct); __HAL_AFIO_REMAP_TIM4_ENABLE(); /* TIM4 interrupt Init */
HAL_NVIC_SetPriority(TIM4_IRQn, , );
HAL_NVIC_EnableIRQ(TIM4_IRQn);
/* USER CODE BEGIN TIM4_MspInit 1 */ /* USER CODE END TIM4_MspInit 1 */
}
} void HAL_TIM_IC_MspDeInit(TIM_HandleTypeDef* tim_icHandle)
{ if(tim_icHandle->Instance==TIM4)
{
/* USER CODE BEGIN TIM4_MspDeInit 0 */ /* USER CODE END TIM4_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM4_CLK_DISABLE(); /**TIM4 GPIO Configuration
PD12 ------> TIM4_CH1
*/
HAL_GPIO_DeInit(GPIOD, GPIO_PIN_12); /* TIM4 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM4_IRQn);
/* USER CODE BEGIN TIM4_MspDeInit 1 */ /* USER CODE END TIM4_MspDeInit 1 */
}
}
3.主程序
在写自己的代码之前要说一下HAL库的stm32f1xx_hal_tim.c里有一个BUG,他们这个宏定义——#define TIM_RESET_CAPTUREPOLARITY(__HANDLE__, __CHANNEL__)要改一下
原本如下:
#define TIM_RESET_CAPTUREPOLARITY(__HANDLE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC1P | TIM_CCER_CC1NP))) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC2P | TIM_CCER_CC2NP)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC3P)) :\
((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC4P)))
改了如下:
#define TIM_RESET_CAPTUREPOLARITY(__HANDLE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC1P | TIM_CCER_CC1NP)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC2P | TIM_CCER_CC2NP)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC3P)) :\
((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC4P)))
两者唯一的区别就是原本的第一行后面多了一个括号!!!
输入捕获的功能就是当输入捕获引脚检测到上升沿或下降沿时进入中断服务函数,处理事务,该中断服务函数为void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
主函数:
while ()
{
/* USER CODE END WHILE */ /* USER CODE BEGIN 3 */
if(capture_Cnt==)
{
__HAL_TIM_SET_CAPTUREPOLARITY(&htim4,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_RISING); //设置为上升沿捕获
HAL_TIM_IC_Start_IT(&htim4, TIM_CHANNEL_1);
capture_Cnt++; } }
中断函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
uint32_t a;
if(TIM4 == htim->Instance)
{
if(capture_Cnt==)
{
//capture_Buf[0] =HAL_TIM_ReadCapturedValue(&htim4,TIM_CHANNEL_1); //获取当前的捕获值
HAL_TIM_IC_Stop_IT(&htim4,TIM_CHANNEL_1); //停止捕获
capture_Cnt=;
Number++;
printf("\n%d",Number);
// printf("\n捕捉上升沿:%d",capture_Buf[0] ); } } }
我这里只是计算一下进入了多少次中断,你们可以根据自己的需求来写处理的程序。
基于STM32F103和Cube的输入捕获例程的更多相关文章
- (stm32f103学习总结)—输入捕获模式
一.输入捕获介绍 在定时器中断实验章节中我们介绍了通用定时器具有多种功能,输入捕获就是其中一种.STM32F1 除了基本定时器 TIM6 和 TIM7,其他定时器都具有输入捕获功能.输入捕获可以对输入 ...
- [STM32F103]PWM输入捕获配置
l 初始化定时器和通道对应IO的时钟. l 初始化IO口,模式为输入: GPIO_Init(); GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 ...
- STM32F0xx_TIM输入捕获(计算频率)配置详细过程
前言 关于STM32的定时器,可谓是功能强大,估计没有多少人研究完STM32定时器的所有功能(包括我也没有),只是使用常用的一些功能,后续我会推出关于STM32定时器的更多功能. STM32芯片多数为 ...
- 基于STM32F429和Cube的主从定时器多通道输出固定个数的PWM波形
主从定时器的原理已在上篇博文: 基于STM32F429+HAL库编写的定时器主从门控模式级联输出固定个数PWM脉冲的程序 讲解了,这篇重点就讲如何实现多通道的PWM级联输出. 1.软件环境 Keil5 ...
- 基于SoCkit的opencl实验1-基础例程
基于SoCkit的opencl实验1-基础例程 准备软硬件 Arrow SoCkit Board 4GB or larger microSD Card Quartus II v14.1 SoCEDS ...
- STM32输入捕获模式设置并用DMA接收数据
参考: STM32的PWM输入模式设置并用DMA接收数据 Input capture mode The input stage samples the corresponding TIx input ...
- STM32输入捕获TIM2四通道
相比于一通道,原子的例程里因为清了计数时间,所以要对程序进行修改. 记录上升沿后的计数,然后记录下降沿的计数.相减后计算高电平时间,对于定时器中断间隔的边界要分开处理. 这里因为我的接收机时间是1ms ...
- STM32之输入捕获以及小小应用(库)
五一之际,先祝大家五一快乐.其实快乐很简单,工作的人有假放,学习的人也有假放,像我,有假放才有更多的时间学自己想学的东西.51假期学51,可惜没有32假期呀.好了..言归正传,大家听过吸星大法吧..在 ...
- stm32cube--通用定时器--输入捕获
用定时器输入捕获做红外线接收实验.(此次试验以通道2为例) ①stm32cube配置 ② ③ ④程序中主要用到的输入捕获相关寄存器 uint16_t tim_sr,tim_ccer,tim_ccr; ...
随机推荐
- 使用回车键执行input框事件
html: <input type="text" class="search-data-input" placeholder="请输入关键词&q ...
- web前端开发面试题(附答案)-2
1.label是什么标签,有什么作用?和for属性使用的作用? label标签来定义表单控制间的关系,当用户选择该标签时,浏览器会自动将焦点转到和标签相关的表单控件上. label 元素不会向用户呈现 ...
- Spark Streaming 入门
概述 什么是 Spark Streaming? Spark Streaming is an extension of the core Spark API that enables scalable, ...
- 在Docker中启动Cloudera
写在前面 记录一下,一个简单的cloudera处理平台的构建过程和一些基本组件的使用 前置说明 需要一台安装有Docker的机器 docker常用命令: docker ps docker ps -a ...
- Git项目分支分配
主要分支包含master分支与develop分支,临时分支可以分为: release: 从develop分出 ,是最终要发布的版本. feature: 实现某功能时推荐新建分支,从develop分出. ...
- 挑战程序设计——迷宫的最短路径(BFS)
题目详情 Description 给定一个大小为 N * M 的迷宫.迷宫由通道和墙壁组成,每一步可以向邻接的上下左右四格的通道移动.请求出从起点到终点所需的最小步数 限制条件: N,M <= ...
- ThinkPHP框架快速开发网站
使用ThinkPHP框架快速搭建网站 这一周一直忙于做实验室的网站,基本功能算是完成了.比较有收获的是大概了解了ThinkPHP框架.写一些东西留作纪念吧.如果对于同样是Web方面新手的你有一丝丝帮助 ...
- Mongoose: aggregate聚合 $group使用说明
aggregate聚合是通过管道操作实现的.聚合管道里的每一步输出,都会作为下一步的输入,每一步在输入文档执行完操作后生成输出文档. 聚合管道: $project 修改输入文档的结构.可以用来重命名 ...
- Django学习之文件上传
就这么六步! 一.settings配置文件中配置 MEDIA_URL = '/media/' MEDIA_ROOT = os.path.join(BASE_DIR, 'medias').replace ...
- [Swoole] 在Ubuntu下安装、快速开始
本文主要讲述在 Ubuntu 下编译安装 Swoole,并根据官方文档给出的demo进行了测试和搬运,包括:TCP服务器.UDP服务器.HTTP服务器.WebSocket服务器.异步客户端.定时器和协 ...