西门子PLC1200内使用SCL实现简化版PID算法
西门子自带的PID效果很好,但是会比较吃性能,使用次数有限,很多地方需要PID但不需要这么精准的PID,所以网上找个简单的算法自己调用。
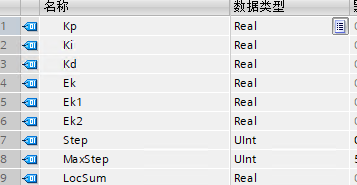
新建数据类型
前三个就是PID三个参数
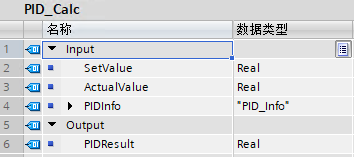
新建FC块:
#PIDInfo.Step += ;
IF #PIDInfo.Step >= #PIDInfo.MaxStep- THEN
#PIDInfo.Step := ;
#PIDInfo.Ek := #SetValue - #ActualValue;
#PIDInfo.LocSum += #PIDInfo.Ek; //累计误差
#PIDResult := #PIDInfo.Kp * #PIDInfo.Ek + (#PIDInfo.Ki * #PIDInfo.LocSum) + #PIDInfo.Kd * (#PIDInfo.Ek1 - #PIDInfo.Ek);
#PIDInfo.Ek1 := #PIDInfo.Ek;
END_IF;
调用:
DB块内增加变量

Step和MaxStep用于控制扫描多少次调用一次,以及可以错开调用

左边填入设置值,实际值,和刚才添加的变量,右边输出PID,PID输出值没有明确的范围,自己用Limite限制范围,调整P值让输出值在范围内浮动
附C#实现
class PID_Info
{
float Kp = ; //比例系数Proportional
float Ki = 0.2f; //积分系数Integral
float Kd = 0.1f; //微分系数Derivative float Ek; //当前误差
float Ek1; //前一次误差 e(k-1)
float Ek2; //再前一次误差 e(k-2)
float LocSum; //累计积分位置 public static float PID_Calc1(float SetValue, float ActualValue, PID_Info PID)
{
float PIDLoc; //位置 PID.Ek = SetValue - ActualValue;
PID.LocSum += PID.Ek; //累计误差 PIDLoc = PID.Kp * PID.Ek + (PID.Ki * PID.LocSum) + PID.Kd * (PID.Ek1 - PID.Ek); PID.Ek1 = PID.Ek;
return PIDLoc;
} public float Calc1(float SetValue, float ActualValue)
{
return PID_Calc1(SetValue, ActualValue, this);
} public static float PID_Inc(float SetValue, float ActualValue, PID_Info PID)
{
float PIDInc; //增量 PID.Ek = SetValue - ActualValue;
PIDInc = (PID.Kp * PID.Ek) - (PID.Ki * PID.Ek1) + (PID.Kd * PID.Ek2); PID.Ek2 = PID.Ek1;
PID.Ek1 = PID.Ek;
return PIDInc;
} public float Inc(float SetValue, float ActualValue)
{
return PID_Inc(SetValue, ActualValue, this);
}
}
算法来自
blog。csdn。net/weibo1230123/article/details/80812211
西门子PLC1200内使用SCL实现简化版PID算法的更多相关文章
- 线性控制原理——PID算法应用
使用控制系统(PID)控制被控对象 PID控制的三要素:控制器,被控对象,反馈器.控制器就是一个数学模型,就PID来说,等同于PID算法.是对反馈量的一个处理与输出.通俗的说就是对于每个被控的量,我的 ...
- PID算法笔记2
总所周知,PID算法是个很经典的东西.而做自平衡小车,飞行器PID是一个必须翻过的坎.因此本节我们来好好讲解一下PID,根据我在学习中的体会,力求通俗易懂.并举出PID的形象例子来帮助理解PID.一. ...
- PID算法(c 语言)(转)
PID算法(c 语言)(来自老外) #include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; ...
- 单片机之PID算法
说到PID算法,想必大部人并不陌生,PID算法在很多方面都有重要应用,比如电机的速度控制,恒温槽的温度控制,四轴飞行器的平衡控制等等,作为闭环控制系统中的一种重要算法,其优点和可实现性都成为人们的首选 ...
- PID算法通俗理解,平衡车,倒立摆,适合不理解PID算法的人来看!
先插句广告,本人QQ522414928,不熟悉PID算法的可以一起交流学习,随时在线(PID资料再我的另一篇博客里) 倒立摆资料连接↓ https://www.cnblogs.com/LiuXinyu ...
- PID算法的理解及场景模拟
增量式PID算法的简化版之后的公式: △u(t)=Ae(t)-Be(t-1)+Ce(t-2) △u:PID控制器输出的下一时刻的调整量 e(t):PID控制器在当前时刻的状态变化量-给定值 e(t-1 ...
- 023_STM32之PID算法原理及应用
(O)关于程序BUG说明,看最后面的红色字体,视频和源代码中都没有说明 (一)PID控制算法(P:比例 I:积分 D:微分) (二)首先先说明原理,使用的是数字PID算法,模拟PID算法在计算机这样的 ...
- 某科学的PID算法学习笔记
最近,在某社团的要求下,自学了PID算法.学完后,深切地感受到PID算法之强大.PID算法应用广泛,比如加热器.平衡车.无人机等等,是自动控制理论中比较容易理解但十分重要的算法. 下面是博主学习过程中 ...
- 广告成本控制-PID算法
今天我们来聊聊广告成本控制中常用的PID算法. 0.PID算法简介 首先我们可以看下维基百科中给PID算法的定义:由比例单元(Proportional).积分单元(Integral)和微分单元(Der ...
随机推荐
- Kotlin调用Java程序重点分析
在上一次https://www.cnblogs.com/webor2006/p/11530801.html中学习了Kotlin调用Java的使用方式及一些注意点,这次继续其这个场景进一步学习. 数组( ...
- 2019年牛客多校第一场 C题Euclidean Distance 暴力+数学
题目链接 传送门 题意 给你\(n\)个数\(a_i\),要你在满足下面条件下使得\(\sum\limits_{i=1}^{n}(a_i-p_i)^2\)最小(题目给的\(m\)只是为了将\(a_i\ ...
- C#将文件转成16进制码流写入数据库存起来,访问的时候再还原成PDF文件。
转自https://blog.csdn.net/liubowei_0312/article/details/53378146 适合将文件写入数据库,远程访问的时候还原1.首先把文件转成十六进制文件流 ...
- Backpressure & Elastic Scaling
spark.streaming从不稳定到稳定状态,解决数据量接收数据时突然变大,使得无法及时处理数据,稳定性得到保证 开启方式: spark.streaming.backpressure.enable ...
- C++对象内存模型1(堆栈模型)(转)
对象内存模型 一. 栈(Stack) VS. 堆(heap) 栈 由系统自动管理,以执行函数为单位 空间大小编译时确定(参数+局部变量) 函数执行时,系统自动分配一个stack 函数执行结束时,系统立 ...
- SPI总线协议理解
1.什么是SPI: 是摩托罗拉公司设计的一种全双工通信.高速的.同步的串行外部设备通信协议. 2.SPI作用: 用于设备之间的数据交互. 3.SPI由什么构成: 1)MOSI:主设备输出从设备输入线, ...
- WinDbg常用命令系列---源代码操作相关命令
lsf, lsf- (Load or Unload Source File) lsf和lsf-命令加载或卸载源文件. lsf Filename lsf- Filename 参数: Filename指定 ...
- WinDbg常用命令系列---显示引用的内存(dda、ddp、ddu、dpa、dpp、dpu、dqa、dqp、dqu)
命令dda, ddp, ddu, dpa, dpp, dpu, dqa, dqp, 和 dqu在指定位置显示指针,取消对该指针的引用,然后以各种格式显示结果位置的内存. ddp [Options] [ ...
- C# 监测每个方法的执行次数和占用时间(测试4)
今天也要做这个功能,就百度一下,结果搜索到了自己的文章.一开始还没注意,当看到里面的一个注释的方法时,一开始还以为自己复制错了代码,结果仔细一看网页的文章,我去,原来是自己写的,写的确实不咋地. 把自 ...
- GoCN每日新闻(2019-10-07)
GoCN每日新闻(2019-10-07) 国庆专辑:GopherChina 祝大家国庆节快乐(假期最后一天) GoCN每日新闻(2019-10-07) 1. Go 不好的点:JSON 解析的探 ...