【原创】(二)Linux进程调度器-CPU负载
背景
Read the fucking source code!--By 鲁迅A picture is worth a thousand words.--By 高尔基
说明:
- Kernel版本:4.14
- ARM64处理器,Contex-A53,双核
- 使用工具:Source Insight 3.5, Visio
1. 概述
CPU负载(cpu load)指的是某个时间点进程对系统产生的压力。
来张图来类比下(参考Understanding Linux CPU Load)

- CPU的运行能力,就如大桥的通行能力,分别有满负荷,非满负荷,超负荷等状态,这几种状态对应不同的cpu load值;
- 单CPU满负荷运行时cpu_load为1,当多个CPU或多核时,相当于大桥有多个车道,满负荷运行时cpu_load值为CPU数或多核数;
- CPU负载的计算(以单CPU为例),假设一分钟内执行10个任务代表满负荷,当一分钟给出30个任务时,CPU只能处理10个,剩余20个不能处理,cpu_load=3;
在实际系统中查看:
cat /proc/cpuinfo:查看CPU信息;cat /proc/loadavg:查看cpu最近1/5/15分钟的平均负载:
计算CPU负载,可以让调度器更好的进行负载均衡处理,以便提高系统的运行效率。此外,内核中的其他子系统也可以参考这些CPU负载值来进行相应的调整,比如DVFS等。
目前内核中,有以下几种方式来跟踪CPU负载:
- 全局CPU平均负载;
- 运行队列CPU负载;
PELT(per entity load tracking);
这也是本文需要探讨的内容,开始吧。
2. 全局CPU平均负载
2.1 基础概念
先来明确两个与CPU负载计算相关的概念:
active task(活动任务):只有知道活动任务数量,才能计算CPU负载,而活动任务包括了TASK_RUNNING和TASK_UNINTERRUPTIBLE两类任务。包含TASK_UNINTERRUPTIBLE任务的原因是,这类任务经常是在等待I/O请求,将其包含在内也合理;NO_HZ:我们都知道Linux内核每隔固定时间发出timer interrupt,而HZ是用来定义1秒中的timer interrupts次数,HZ的倒数是tick,是系统的节拍器,每个tick会处理包括调度器、时间管理、定时器等事务。周期性的时钟中断带来的问题是,不管CPU空闲或繁忙都会触发,会带来额外的系统损耗,因此引入了NO_HZ模式,可以在CPU空闲时将周期性时钟关掉。在NO_HZ期间,活动任务数量的改变也需要考虑,而它的计算不如周期性时钟模式下直观。
2.2 流程
Linux内核中定义了三个全局变量值avenrun[3],用于存放最近1/5/15分钟的平均CPU负载。
看一下计算流程:
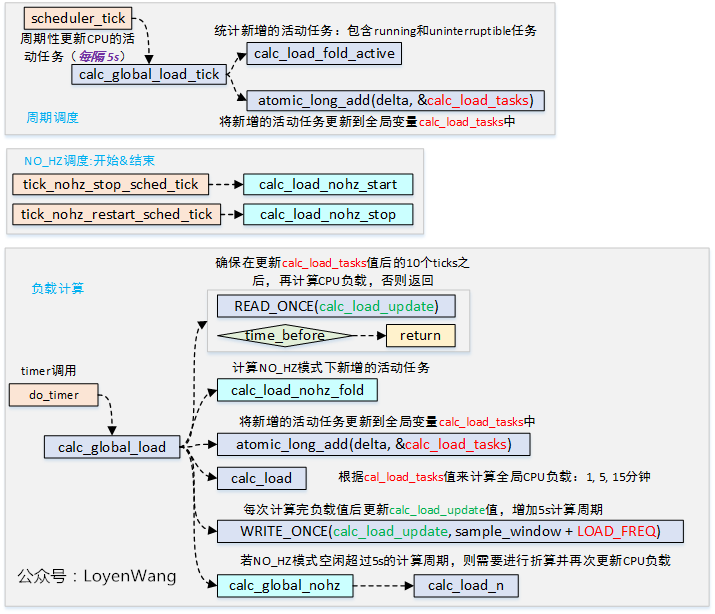
- 计算活动任务数,这个包括两部分:1)周期性调度中新增加的活动任务;2)在
NO_HZ期间增加的活动任务数; - 根据活动任务数值,再结合全局变量值
avenrun[]中的old value,来计算新的CPU负载值,并最终替换掉avenrun[]中的值; - 系统默认每隔5秒钟会计算一次负载,如果由于
NO_HZ空闲而错过了下一个CPU负载的计算周期,则需要再次进行更新。比如NO_HZ空闲20秒而无法更新CPU负载,前5秒负载已经更新,需要计算剩余的3个计算周期的负载来继续更新;
2.3 计算方法
Linux内核中,采用11位精度的定点化计算,CPU负载1.0由整数2048表示,宏定义如下:
#define FSHIFT 11 /* nr of bits of precision */
#define FIXED_1 (1<<FSHIFT) /* 1.0 as fixed-point */
#define LOAD_FREQ (5*HZ+1) /* 5 sec intervals */
#define EXP_1 1884 /* 1/exp(5sec/1min) as fixed-point */
#define EXP_5 2014 /* 1/exp(5sec/5min) */
#define EXP_15 2037 /* 1/exp(5sec/15min) */
计算公式如下:

load值为旧的CPU负载值avenrun[],整个计算完成后得到新的负载值,再更新avenrun[];EXP_1/EXP_5/EXP_15,分别代表最近1/5/15分钟的定点化值的指数因子;active值,根据读取calc_load_tasks的值来判断,大于0则乘以FIXED_1(2048)传入;- 根据
active和load值的大小关系来决定是否需要加1,类似于四舍五入的机制;
关键代码如下:
active = atomic_long_read(&calc_load_tasks);
active = active > 0 ? active * FIXED_1 : 0;
avenrun[0] = calc_load(avenrun[0], EXP_1, active);
avenrun[1] = calc_load(avenrun[1], EXP_5, active);
avenrun[2] = calc_load(avenrun[2], EXP_15, active);
NO_HZ模式下活动任务数量更改的计算
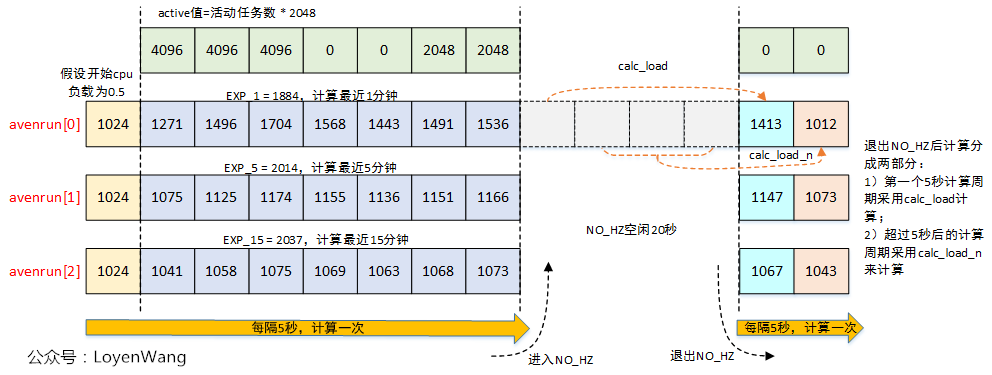
由于NO_HZ空闲效应而更改的CPU活动任务数量,存放在全局变量calc_load_nohz[2]中,并且每5秒计算周期交替更换一次存储位置(calc_load_read_idx/calc_load_write_idx),其他程序可以去读取最近5秒内的活动任务变化的增量值。
计算示例
假设在某个CPU上,开始计算时load=0.5,根据calc_load_tasks值获取不同的active,中间进入NO_HZ模式空闲了20秒,整个计算的值如下图:
3. 运行队列CPU负载
- Linux系统会计算每个tick的平均CPU负载,并将其存储在运行队列中
rq->cpu_load[5],用于负载均衡;
下图显示了计算运行队列的CPU负载的处理流程:
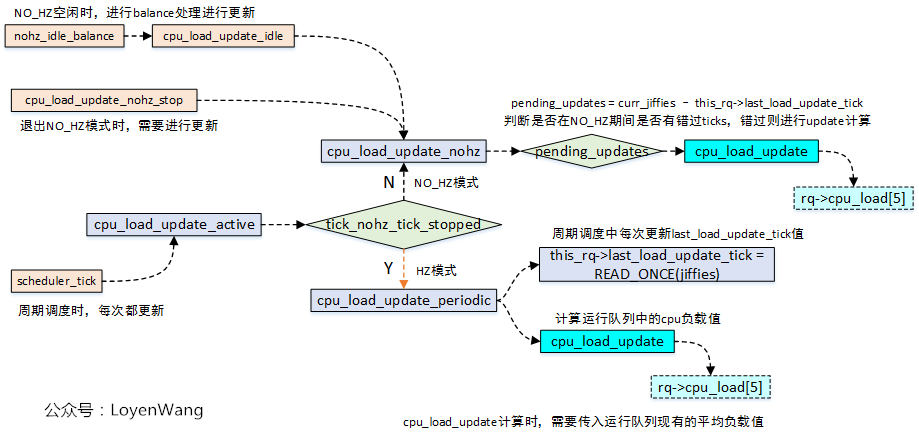
最终通过cpu_load_update来计算,逻辑如下:
- 其中传入的
this_load值,为运行队列现有的平均负载值。
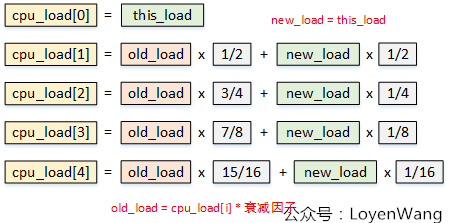
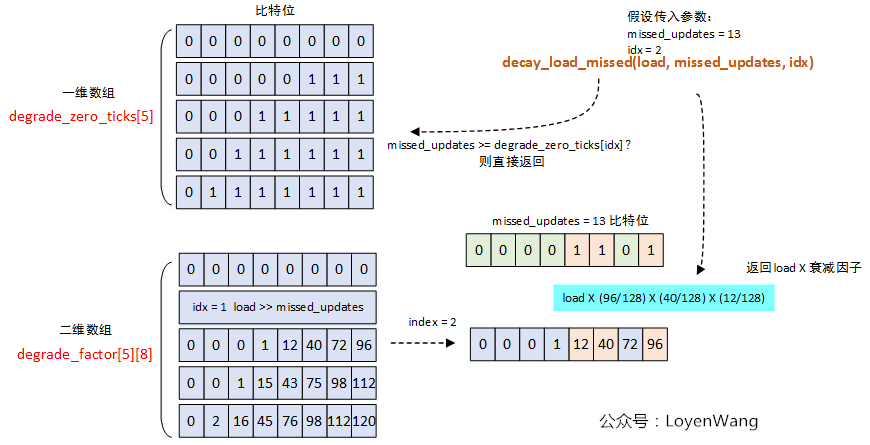
上图中的衰减因子,是在NO_HZ模式下去进行计算的。在没有使用tick时,从预先计算的表中计算负载值。Linux内核中定义了两个全局变量:
#define DEGRADE_SHIFT 7
static const u8 degrade_zero_ticks[CPU_LOAD_IDX_MAX] = {0, 8, 32, 64, 128};
static const u8 degrade_factor[CPU_LOAD_IDX_MAX][DEGRADE_SHIFT + 1] = {
{ 0, 0, 0, 0, 0, 0, 0, 0 },
{ 64, 32, 8, 0, 0, 0, 0, 0 },
{ 96, 72, 40, 12, 1, 0, 0, 0 },
{ 112, 98, 75, 43, 15, 1, 0, 0 },
{ 120, 112, 98, 76, 45, 16, 2, 0 }
};
衰减因子的计算主要是在delay_load_missed()函数中完成,该函数会返回load * 衰减因子的值,作为上图中的old_load。
计算方式如下:
4. PELT
PELT, Per-entity load tracking。在Linux引入PELT之前,CFS调度器在计算CPU负载时,通过跟踪每个运行队列上的负载来计算;在引入PELT之后,通过跟踪每个调度实体的负载贡献来计算。(其中,调度实体:指task或task_group)
4.1 PELT计算方法
总体的计算思路:
将调度实体的可运行状态时间(正在运行+等待CPU调度运行),按1024us划分成不同的周期,计算每个周期内该调度实体对系统负载的贡献,最后完成累加。其中,每个计算周期,随着时间的推移,需要乘以衰减因子y进行一次衰减操作。
先来看一下每个调度实体的负载贡献计算公式:
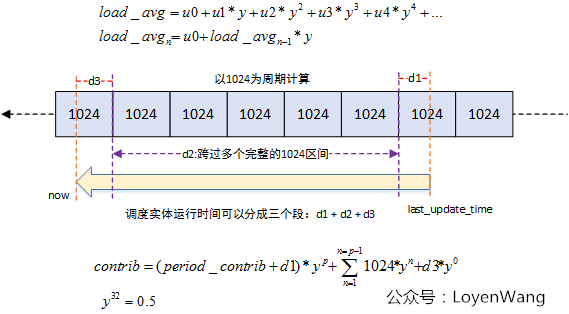
- 当前时间点的负载贡献 = 当前时间点负载 + 上个周期负载贡献 * 衰减因子;
- 假设一个调度实体被调度运行,运行时间段可以分成三个段
d1/d2/d3,这三个段是被1024us的计算周期分割而成,period_contrib是调度实体last_update_time时在计算周期间的贡献值,; - 总体的贡献值,也是根据
d1/d2/d3来分段计算,最终相加即可; y为衰减因子,每隔1024us就乘以y来衰减一次;
计算的调用流程如下图:
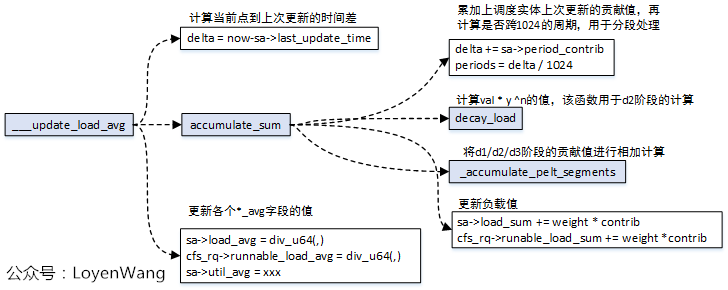
- 函数主要是计算时间差,再分成d1/d2/d3来分段计算处理,最终更新相应的字段;
decay_load函数要计算val * y^n,内核提供了一张表来避免浮点运算,值存储在runnable_avg_yN_inv数组中;
static const u32 runnable_avg_yN_inv[] = {
0xffffffff, 0xfa83b2da, 0xf5257d14, 0xefe4b99a, 0xeac0c6e6, 0xe5b906e6,
0xe0ccdeeb, 0xdbfbb796, 0xd744fcc9, 0xd2a81d91, 0xce248c14, 0xc9b9bd85,
0xc5672a10, 0xc12c4cc9, 0xbd08a39e, 0xb8fbaf46, 0xb504f333, 0xb123f581,
0xad583ee9, 0xa9a15ab4, 0xa5fed6a9, 0xa2704302, 0x9ef5325f, 0x9b8d39b9,
0x9837f050, 0x94f4efa8, 0x91c3d373, 0x8ea4398a, 0x8b95c1e3, 0x88980e80,
0x85aac367, 0x82cd8698,
};
Linux中使用struct sched_avg来记录调度实体和CFS运行队列的负载信息,因此struct sched_entity和struct cfs_rq结构体中,都包含了struct sched_avg,字段介绍如下:
struct sched_avg {
u64 last_update_time; //上一次负载更新的时间,主要用于计算时间差;
u64 load_sum; //可运行时间带来的负载贡献总和,包括等待调度时间和正在运行时间;
u32 util_sum; //正在运行时间带来的负载贡献总和;
u32 period_contrib; //上一次负载更新时,对1024求余的值;
unsigned long load_avg; //可运行时间的平均负载贡献;
unsigned long util_avg; //正在运行时间的平均负载贡献;
};
4.2 PELT计算调用
PELT计算的发生时机如下图所示:

- 调度实体的相关操作,包括入列出列操作,都会进行负载贡献的计算;
PELT的算法还在持续的改进中,各个内核版本也存在差异,大体的思路已经在上文中介绍到了,细节就不再深入分析了。

【原创】(二)Linux进程调度器-CPU负载的更多相关文章
- 【原创】(一)Linux进程调度器-基础
背景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本: ...
- Linux进程调度器的设计--Linux进程的管理与调度(十七)
1 前景回顾 1.1 进程调度 内存中保存了对每个进程的唯一描述, 并通过若干结构与其他进程连接起来. 调度器面对的情形就是这样, 其任务是在程序之间共享CPU时间, 创造并行执行的错觉, 该任务分为 ...
- Linux进程调度器概述--Linux进程的管理与调度(十五)
调度器面对的情形就是这样, 其任务是在程序之间共享CPU时间, 创造并行执行的错觉, 该任务分为两个不同的部分, 其中一个涉及调度策略, 另外一个涉及上下文切换. 1 背景知识 1.1 什么是调度器 ...
- linux里的CPU负载
昨天查看Nagios警报信息,发现其中一台服务器CPU负载过重,机器为CentOS系统.信息如下: 2011-2-15 (星期二) 17:50 WARNING - load average: 9.73 ...
- Linux系统排查——CPU负载篇
本随笔介绍CPU负载的排查手段. 查看系统负载的工具:uptime,w,都能查看系统负载,系统平均负载是处于运行或不可打扰状态的进程的平均数, 可运行:运行态,占用CPU,或就绪态,等待CPU调度. ...
- 【原创】(三)Linux进程调度器-进程切换
背景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本: ...
- Linux如何查看CPU负载
负载(load)是Linux机器的一个重要指标,直观了反应了机器当前的状态.如果机器负载过高,那么对机器的操作将难以进行. linux的负载高,主要是由于CPU使用.内存使用.IO消耗三部分构成.任意 ...
- Nginx学习系列二Linux下Nginx实现负载均衡
关于在本地虚拟机(VMware 14)下安装Linux同时安装Nginx,请参考Nginx学习系列之搭建环境 1.启动Nginx 在Nginx安装成功的前提下,启动Nginx 已root模式登陆(权限 ...
- 【原创】(五)Linux进程调度-CFS调度器
背景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本: ...
随机推荐
- 阿里云ECS服务器Ubuntu配置MySQL远程访问
root账户登录服务器Ubuntu16.04 apt-get update apt-get install mysql-server mysql-client; 安装时会让你设置root密码,输入2次 ...
- JavaScript substring()
JavaScript substring() 方法 参数 描述 start 必需.一个非负的整数,规定要提取的子串的第一个字符在 stringObject 中的位置. stop 可选.一个非负的整数, ...
- schedule of 2016-11-7~2016-11-10(Monday~Thursday)——1st semester of 2nd Grade
most important things to do 1.joint phd preparations 2.journal paper to write 3.solid fundamental kn ...
- Spring Cloud Alibaba Nacos
1. Spring Cloud Alibaba 介绍 Spring Cloud Alibaba 为分布式应用程序开发提供了一站式解决方案.它包含了开发分布式应用程序所需的所有组件,使得你可以轻松地使用 ...
- 对Java中可变参数的理解
说明 可变参数:是DK1.5之后出现的新特性,其实可变参数是0.1.2.3.....个参数的数组 使用前提 当方法的参数列表数据类型已经确定,但是参数的个数不确定,就可以使用可变参数 使用格式 修饰符 ...
- 搭建自己的Online Judge
前言 很多人对于做题有点厌烦,但是,如果让你出题给别人做那么可能会很有意思.可是,出题只能出在一些别人的OJ上,甚至只能在自己的Word文档里出.今天我教大家一个厉害点的,叫做搭建自己的Online ...
- Python中函数参数 *args 和 **kwargs
普通参数,即在调用函数时必须按照准确的顺序来进行参数传递. 默认参数,即参数含有默认值,在调用函数时可以进行参数传递,若没有进行参数传递则使用默认值,要注意,默认参数必须在普通参数的右侧(否则解释器无 ...
- Numpy科学计算从放弃到入门
目录 一.什么是Numpy ndarray对象 相关文档 二.如何创建数组 三.如何访问数组 下标索引 切片索引 布尔型索引 整数索引 方形索引 四.如何做算数运算 五.如何使用统计函数 六.数组转置 ...
- Tesseract-OCR-v5.0中文识别,训练自定义字库,提高图片的识别效果
1,下载安装Tesseract-OCR 安装,链接地址https://digi.bib.uni-mannheim.de/tesseract/ 2,安装成功 tesseract -v 注意:安装后, ...
- 如何清理 Docker 占用的磁盘空间
Docker 很占用空间,每当我们运行容器.拉取镜像.部署应用.构建自己的镜像时,我们的磁盘空间会被大量占用. 如果你也被这个问题所困扰,咱们就一起看一下 Docker 是如何使用磁盘空间的,以及如何 ...