ROS-TF-监听
前言:监听第一只海龟的位置,然后让第二只海龟跟随第一只海龟。
通过监听tf,我们可以避免繁琐的旋转矩阵的计算,而直接获取我们需要的相关信息。
一、新建cpp文件
新建turtle_tf_listener.cpp文件,内容如下:
#include <ros/ros.h>
#include <tf/transform_listener.h>//监听类TransformListener 的头文件,该对象会自动订阅ROS中的tf消息,并且管理所有的变换关系数据。
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_listener");
ros::NodeHandle node;
//生成一只新乌龟
ros::service::waitForService("spawn");
ros::ServiceClient add_turtle =
node.serviceClient<turtlesim::Spawn>("spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
ros::Publisher turtle_vel =
node.advertise<geometry_msgs::Twist>();//定义发布者turtle_vel
tf::TransformListener listener;//新建监听对象
ros::Rate rate(10.0);
while (node.ok()){
tf::StampedTransform transform;//定义存放转换信息(平动,转动)的变量
try{
listener.lookupTransform("/turtle2", "/turtle1",
ros::Time(), transform);//可以获得两个坐标系之间转换的关系,包括旋转与平移。转换得出的坐标是在“/turtle2”坐标系下的
}
catch (tf::TransformException &ex) {
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}//由于tf的会把监听的内容存放到一个缓存中,然后再读取相关的内容,而这个过程可能会有几毫秒的延迟,也就是,tf的监听器并不能监听到“现在”的变换,所以如果不使用try,catch函数会卡死。
//这个转换基于turtle1的距离和角度,用来计算turtle2的新的线速度和角速度,新的速度被发布在"turtle2/cmd_vel" 话题上,并且sim将使用它来更新turtle2的移动
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = ) +
pow(transform.getOrigin().y(), ));
turtle_vel.publish(vel_msg);//发布话题,控制turtle2的位置。
rate.sleep();
}
;
};
总体思路是:新建监听对象listener,并将turtle1的位置信息转化成vel_msg信息,然后使用发布者turtle_vel发布出去。
二、修改launch文件
在launch文件末尾添加
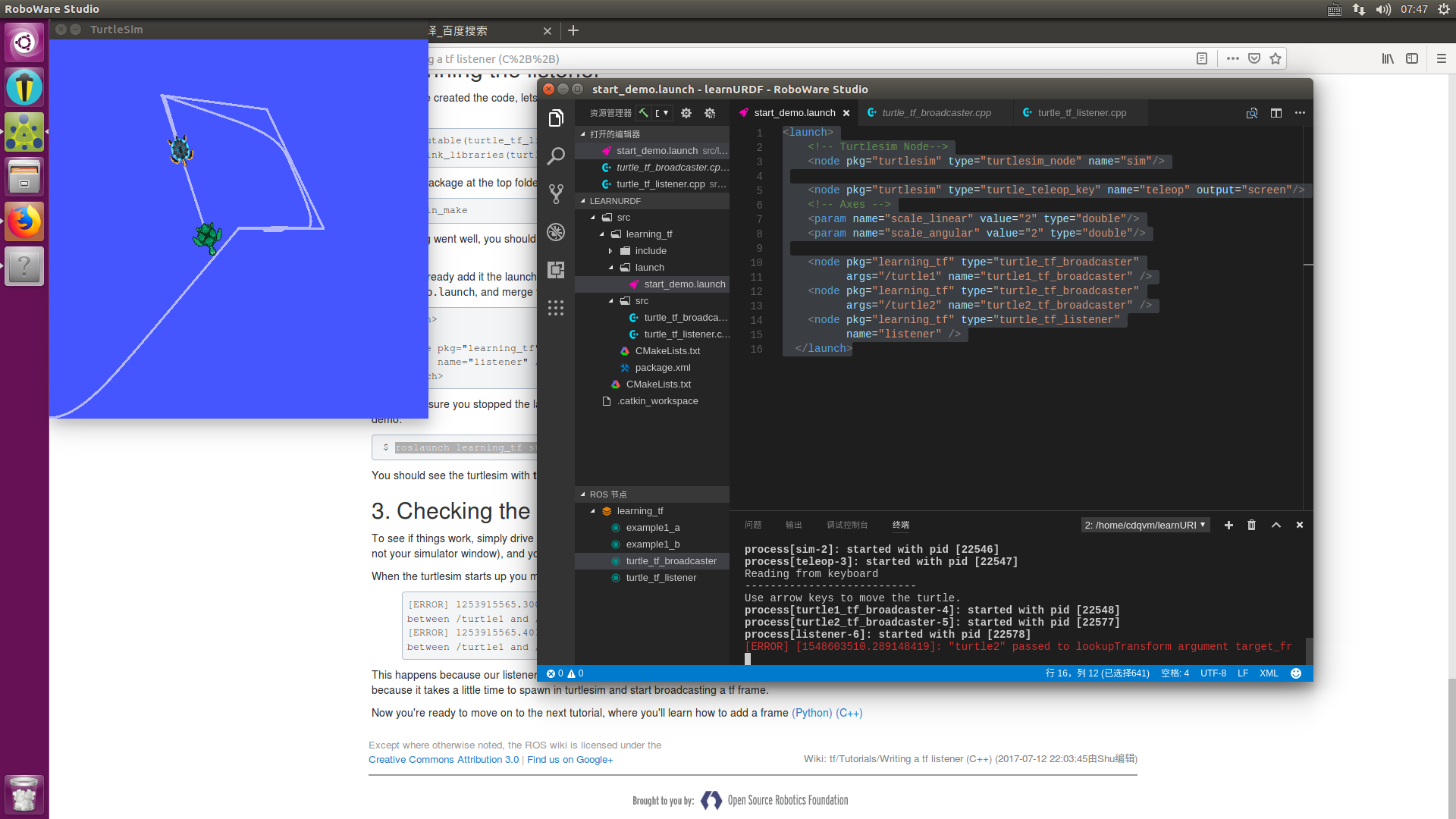
<launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- Axes -->
<param name="scale_linear" value="2" type="double"/>
<param name="scale_angular" value="2" type="double"/>
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_listener"
name="listener" />
</launch>
三、运行
roslaunch learning_tf start_demo.launch
参考自:http://wiki.ros.org/tf/Tutorials/Writing%20a%20tf%20listener%20%28C%2B%2B%29
-END-
ROS-TF-监听的更多相关文章
- ROS tf监听编写
博客转载自:https://www.ncnynl.com/archives/201702/1311.html ROS与C++入门教程-tf-编写tf listener(监听) 说明: 介绍如何使用tf ...
- ROS tf
一.节点中使用(cpp,python) 1. ros wiki 提供的tutorials 2. https://blog.csdn.net/start_from_scratch/article/det ...
- ros之tf坐标系广播与监听的编程实现
创建功能包-learning_tf $ cd ~/catkin_ws/src $ catkin_create_pkg learning_tf roscpp rospy tf turtlesim 如何创 ...
- java鼠标与键盘事件监听
package cn.stat.p3.windowdemo; import java.awt.Button; import java.awt.FlowLayout; import java.awt.F ...
- java Gui编程 事件监听机制
1. GUI编程引言 以前的学习当中,我们都使用的是命令交互方式: 例如:在DOS命令行中通过javac java命令启动程序. 软件的交互的方式: 1. 命令交互方式 图书管理系统 ...
- Java基础--Java---IO流------GUI(布局)、Frame、事件监听机制、窗体事件、Action事件、鼠标事件、对话框Dialog、键盘事件、菜单
* 创建图形化界面 * 1.创建frame窗体 * 2.对窗体进行基本设置 * 比如大小.位置.布局 * 3.定义组件 * 4.将组件通过窗体的add方法添加到窗体 * 5.让窗体显 ...
- 简单读!tomcat源码(一)启动与监听
tomcat 作为知名的web容器,很棒! 本文简单了从其应用命令开始拆解,让我们对他有清晰的了解,揭开神秘的面纱!(冗长的代码流水线,给你一目了然) 话分两头: 1. tomcat是如何启动的? 2 ...
- 10.22 tcpdump:监听网络流量
[功能说明] tcpdump命令是一个截获网络数据包的包分析工具.tcpdump可以将网络中传送的数据包的“头”完全截获下来以提供分析.它支持针对网络层.协议.主机.端口等的过滤,并支持与.或.非逻辑 ...
- 焦点监听事件FocusListener
public class Demo extends JFrame { public Demo() { setBounds(100, 100, 200, 120); setDefaultCloseOpe ...
- java代码对按钮进行监听---------------打印出每次点击按钮的次数
其实,我真不会写嗯? package com.a.b; import java.awt.event.ActionEvent; import java.awt.event.ActionListener; ...
随机推荐
- ionic下拉多项选择
1.npm install ion-multi-picker --save 2.引入 import { MultiPickerModule } from 'ion-multi-picker'; imp ...
- idea中配置xml不自动提示解决方案
1.打开设置File-->Settings(或者Ctrl + Alt + S)--->Languages&Frameworks-->Schemas and DTDS 2.选择 ...
- python爬虫13 | 秒爬,这多线程爬取速度也太猛了,这次就是要让你的爬虫效率杠杠的
快 快了 啊 嘿 小老弟 想啥呢 今天这篇爬虫教程的主题就是一个字 快 想要做到秒爬 就需要知道 什么是多进程 什么是多线程 什么是协程(微线程) 你先去沏杯茶 坐下来 小帅b这就好好给你说道说道 关 ...
- 《hello-world》第八次团队作业:Alpha冲刺-Scrum Meeting 4
项目 内容 这个作业属于哪个课程 2016级计算机科学与工程学院软件工程(西北师范大学) 这个作业的要求在哪里 实验十二 团队作业8:软件测试与Alpha冲刺 团队名称 <hello--worl ...
- 编译器错误消息: CS0016: 未能写入输出文件“c:\Windows\Microsoft.NET\Framework64\v4.0.30319\Temporary ASP.NET Files\root\64b7b75e\4dfbfca6\App_Web_company.master.4611739e.l3t-kpke.dll”--“拒绝访问。 ”
报错 原因:IIS没有权限操作TEMP文件夹 最后重新启动站点
- [转]如何有效地报告Bug
英文原文:Simon Tatham,编译:Dasn 引言 为公众写过软件的人,大概都收到过很拙劣的bug报告,例如: 在报告中说“不好用”: 所报告内容毫无意义: 在报告中用户没有提供足够的信息: 在 ...
- 混合了RBAC和ACL的权限系统(一) -- 用户组织结构
最近的工作是一个基础设计,打造一个基于RBAC和ACL的权限基础组件. 这个基础组件的特点是:同时混合了RBAC和ACL的认证方式,也就是说同时提供系统级别的授权(RBAC)和对象级别的授权(ACL) ...
- 洛谷 P2959 [USACO09OCT]悠闲漫步The Leisurely Stroll
P2959 [USACO09OCT]悠闲漫步The Leisurely Stroll 题目描述 Bessie looks out the barn door at the beautiful spri ...
- 洛谷 P1041 传染病控制
P1041 传染病控制 题目背景 近来,一种新的传染病肆虐全球.蓬莱国也发现了零星感染者,为防止该病在蓬莱国大范围流行,该国政府决定不惜一切代价控制传染病的蔓延.不幸的是,由于人们尚未完全认识这种传染 ...
- mongodb之集群模式
前言 数据量大了或者并发量上来了,单机肯定是抗不住的,这个时候要开始考虑使用集群了.mongodb目前为止支持三种集群模式:主从集群,副本集集群,分片集群. 主从集群 特性 1. 一主多从2. 主负责 ...