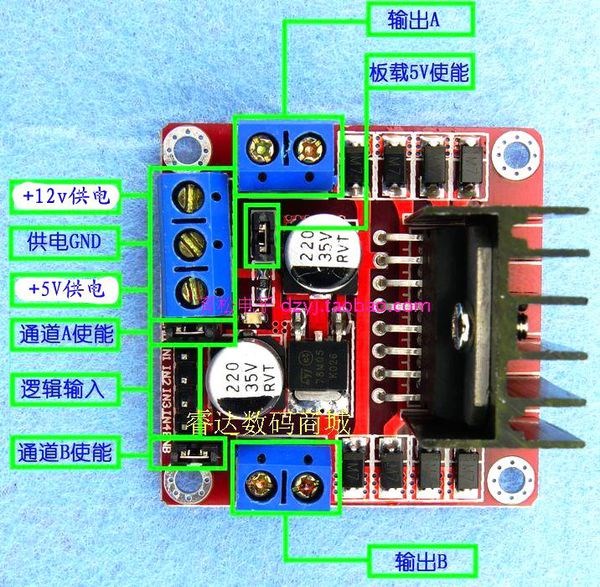
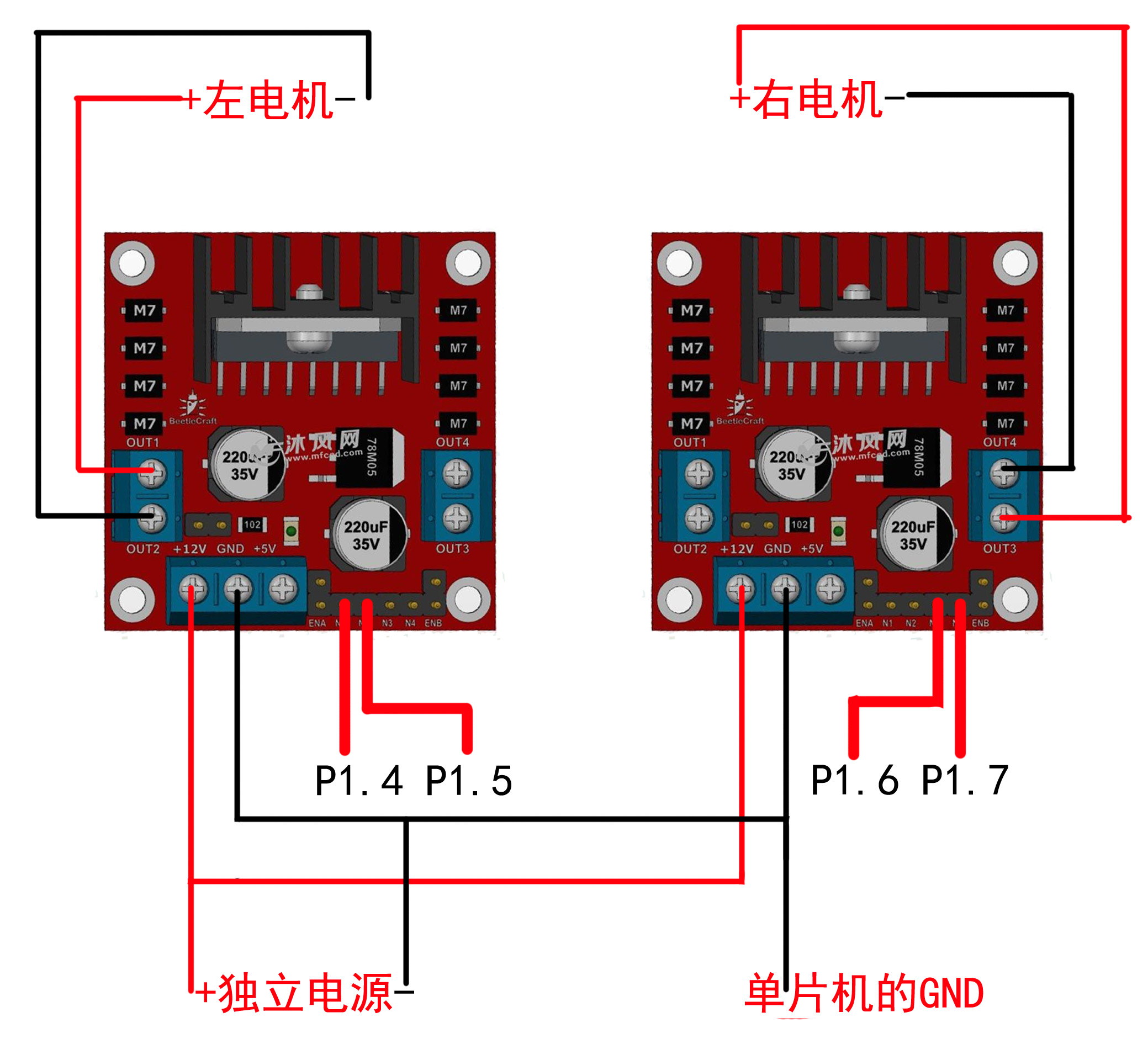
[问题解决]不使用PWM调速系统,彻底解决一个L298N带动两个电机却转速不同的问题

按照我的经验,如果你的独立电源电压比较大,则两个电机的转速会比较快。有时为了调试程序,我们需要车速放慢一些以方便我们观察小车的情况。这里仍然不用调速系统这个硬件,我已经用纯代码的方式做到了调速这一点,下面给大家分享:
while() {
run(); delay_ms(M);
stop();delay_ms(N);
}
- 在上面的代码中,若M=N,则车速就会降为全速的一半。为了使车看上去不是很卡顿的样子,一般这里的M和N比较小,例如M=N=2.
- 延迟函数delay_ms()的具体代码可以参考这里:http://www.cnblogs.com/stxs/p/8878088.html
[问题解决]不使用PWM调速系统,彻底解决一个L298N带动两个电机却转速不同的问题的更多相关文章
- 直流电机PWM调速系统中控制电压非线性研究_控制元件_工业自动化控制_文章
直流电机PWM调速系统中控制电压非线性研究_控制元件_工业自动化控制_文章_e-works数字化企业网 http://articles.e-works.net.cn/Component/Article ...
- 直流调速系统Modelica基本模型
为了便于在OpenModelica进行仿真,形成一个完整的仿真模型,没有使用第三方的库,参照了DrModelica的例程,按照Modelica库的开源模型定义了所用的基本元件模型. 首先给出一些基本类 ...
- PLECS_晶闸管调速系统_9w
3. 直流电机开环调压调速系统模型搭建 (1)电路图 (2)仿真 当 α = pi / 2.7 的时候,直流电机的稳定转速大约保持很低的速度. 随着α的减少,直流电机的速度逐渐增大.当α = pi / ...
- 51单片机 小车 L298N pwm调速 串口控制 按键控制
难点:1.串口定时器T1,和T0定时器优先级 2.pwm频率与占空比的设置 按键控制 按键1——前进 按键2——后退 按键3——加速 按键4——减速 (板子上只有四个按键) 串口控制 ‘1’——前进 ...
- 51单片机—使用PWM对直流电机调速
文章目录 - 什么是PWM - PWM是怎么对直流电机进行调速的 - 通过定时器中断实现PWM调速 - 上代码 - 什么是PWM PWM(脉宽调制),是靠改变脉冲宽度来控制输出电压,通过改变周期来控制 ...
- 玩转X-CTR100 l STM32F4 l TB6612直流电机调速控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的直流调速电机控制,X ...
- 用STM32玩L298N(正反转、调速)
目录 用STM32玩L298N(正反转.调速) 控制直流电机正反转 使用PWM调速 用STM32玩L298N(正反转.调速) 开发板:STM32F103ZET6(正点原子F103核心板)/STM32F ...
- 通过PROFINET网络实现SINAMICS 120的PN IO OPC通讯,起动及调速控制 | OPC通讯
1 概述 TCP/IP 通讯的传输时间可能太长,并且该时间具有不确定性,无法满足生产自动化领域的要求.因此,在进行时间要求苛刻的IO 有效载荷数据通讯时,PROFINET IO 不使用TCP/IP,而 ...
- 过渡与动画 - steps调速函数&CSS值与单位之ch
写在前面 上一篇中我们熟悉五种内置的缓动曲线和(三次)贝塞尔曲线,并且基于此完成了缓动效果. 但是如果我们想要实现逐帧动画,基于贝塞尔曲线的调速函数就显得有些无能为力了,因为我们并不需要帧与帧之间的过 ...
随机推荐
- JSTL中<c:set>标签的用法
<c:set>标签有两种不同的属性设置:var和target. var“版本”用于设置作用域属性,target“版本”用于设置bean属性或Map值. 这两个版本都有两种形式:有标签体和没 ...
- saltstack之syndic的配置
author: headsen chen date: 2018-08-04 22:22:09 1,架构 2,配置 2.1,配置master: yum -y install epel-relea ...
- 【BZOJ3551】[ONTAK2010]Peaks加强版 最小生成树+DFS序+主席树
[BZOJ3545][ONTAK2010]Peaks Description 在Bytemountains有N座山峰,每座山峰有他的高度h_i.有些山峰之间有双向道路相连,共M条路径,每条路径有一个困 ...
- flex弹性布局属性详解!
详细看下flex弹性布局具体属性: flex容器属性详解:flex-direction:row/column:(横排/竖排) 决定元素的排列方向:flex-wrap:nowrap/wrap/wrap- ...
- 最短路和次短路的条数(dijstra算法或spfa算法)POJ3463
http://poj.org/problem?id=3463 Sightseeing Time Limit: 2000MS Memory Limit: 65536K Total Submissio ...
- 利用aspose-words 实现 java中word转pdf文件
利用aspose-words 实现 java中word转pdf文件 首先下载aspose-words-15.8.0-jdk16.jar包 引入jar包,编写Java代码 package test; ...
- thymeleaf 学习笔记-基础篇(中文教程)
(一)Thymeleaf 是个什么? 简单说, Thymeleaf 是一个跟 Velocity.FreeMarker 类似的模板引擎,它可以完全替代 JSP .相较与其他的模板引擎,它有如下 ...
- Yii2框架添加API Modules
原文链接:http://www.itnose.net/detail/6459353.html : 一.环境部署 1. read fucking Yii Documents. http://www.yi ...
- Maven安装(linux系统)
解压: 修改配置: export JAVA_HOME=/usr/java/jdk1..0_80 export MAVEN_HOME=/software/apache-maven- export PAT ...
- 特定于类的内存管理---《C++必知必会》 条款36
我们可以量身定制 operator new 和 operator delete 用于某个类类型,而不是必须使用标准版的 operator new 和 operator delete. 注意:我们不可以 ...