用STM32玩L298N(正反转、调速)
用STM32玩L298N(正反转、调速)
开发板:STM32F103ZET6(正点原子F103核心板)/STM32F103C8T6小板
硬件:L298N,网上一搜就有
软件:Keil MDK5.29
买L298N回来的时候,给的例程是51的,我手上又没有这种板子,解决方法就是自己在网上找别人怎么做,找不到就去找原理图,慢慢来,肯定会有收获的!
开发板图片(正点原子F103核心板)
Gitee项目已发布,需要源码请自助下载
STM32F103ZET6:地址(gitee)
STM32F103C8T6:地址(gitee)
控制直流电机正反转
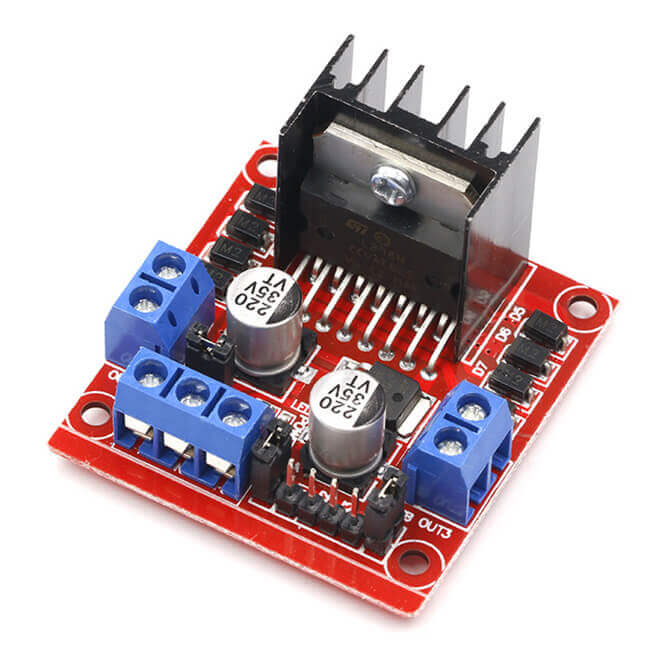
相信你们买回来L298N的时候,样子基本都是这样的
引脚图如下:
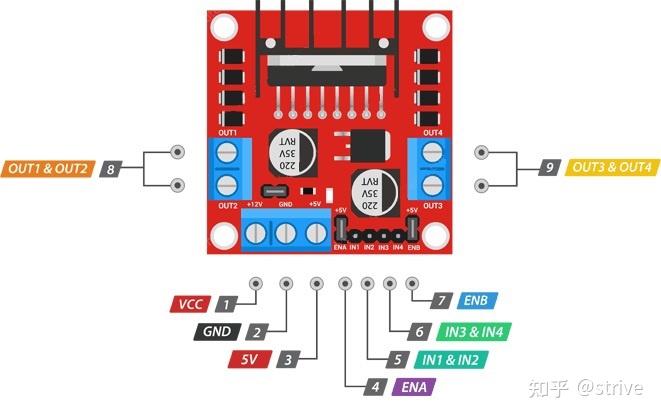
可以看到六个引脚引出来,分别是ENA、IN1/2/3/4、ENB
ENA就是用于使能IN1和IN2的引脚,盖上跳线帽,就是直接使能,拔掉跳线帽就要用pwm来控制电机,ENB同理
OUT1和OUT2就是接第一个直流电机的,OUT3和OUT4同理
控制电机正反转就只需要给数字电压,不需要调速,所以我没有把改线帽拔掉
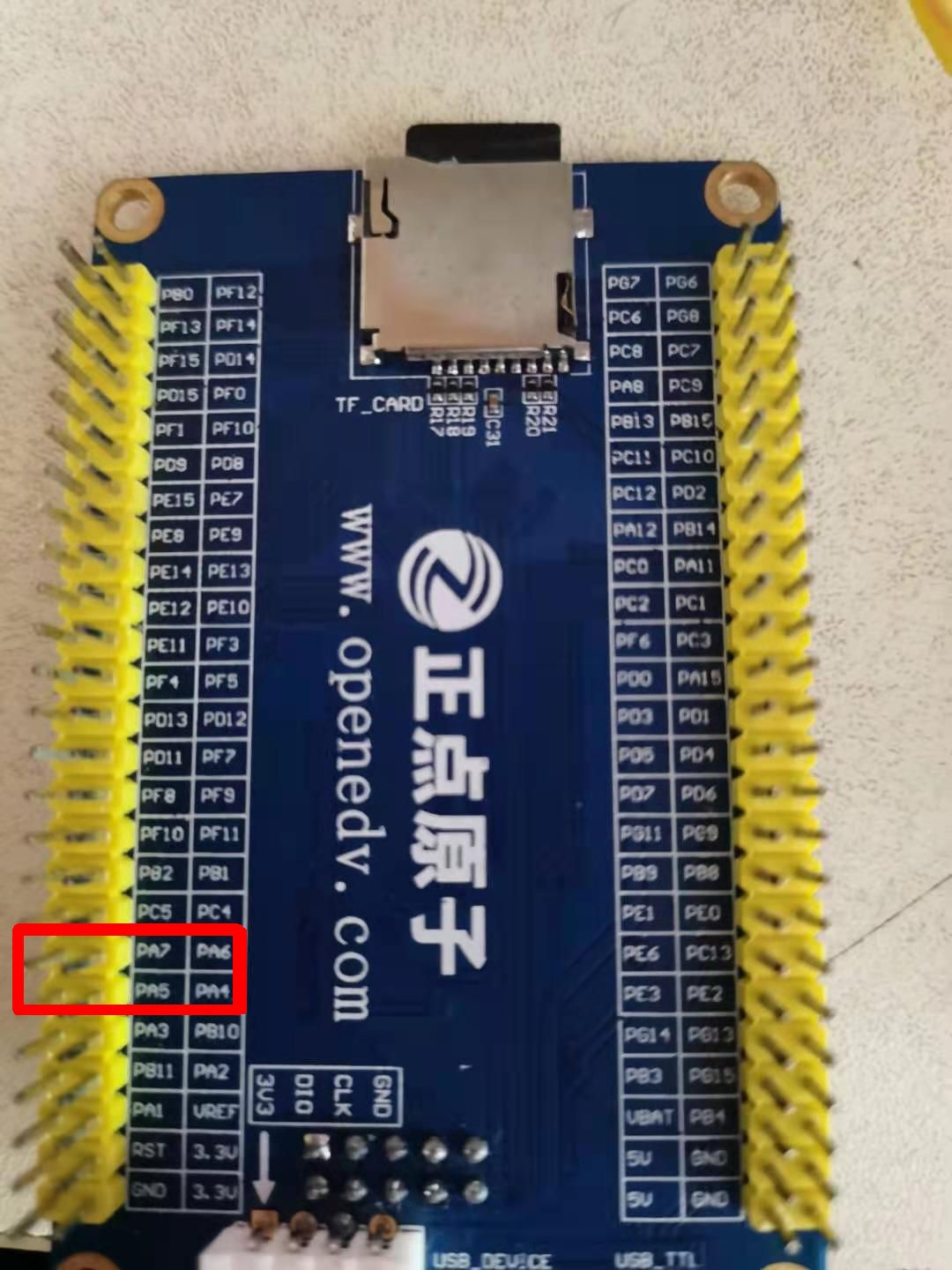
随便找四个引脚,我这里图方便找了PA4/5/6/7
控制程序如下
#define M1_P PAout(4)
#define M1_N PAout(5)
#define M2_P PAout(6)
#define M2_N PAout(7)
void Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化PA4/5/6/7
}
void Motor_Stop(void)
{
M1_P = 0;
M1_N = 0;
M2_P = 0;
M2_N = 0;
}
void Motor_Forward(void)
{
M1_P = 1;
M1_N = 0;
M2_P = 1;
M2_N = 0;
}
示例程序如下:
#include "delay.h"
#include "l298n.h"
int main(void)
{
delay_init(); //延时函数初始化
Motor_Init();
while(1)
{
Motor_Forward();
delay_ms(1500);
Motor_Stop();
delay_ms(1500);
}
}
接线图如下:
效果如下:
视频地址(bilibili)
使用PWM调速
调速就要用到pwm,L298N调速方式可以有两种方式,但都是大差不差,一种是ENA直接使能(1和0),在IN1/2那里给pwm控制,另一种是IN1/2那里给逻辑电平(1和0),ENA用PWM控制,我这里是用的第二种方法,第一种方法我没有研究过...
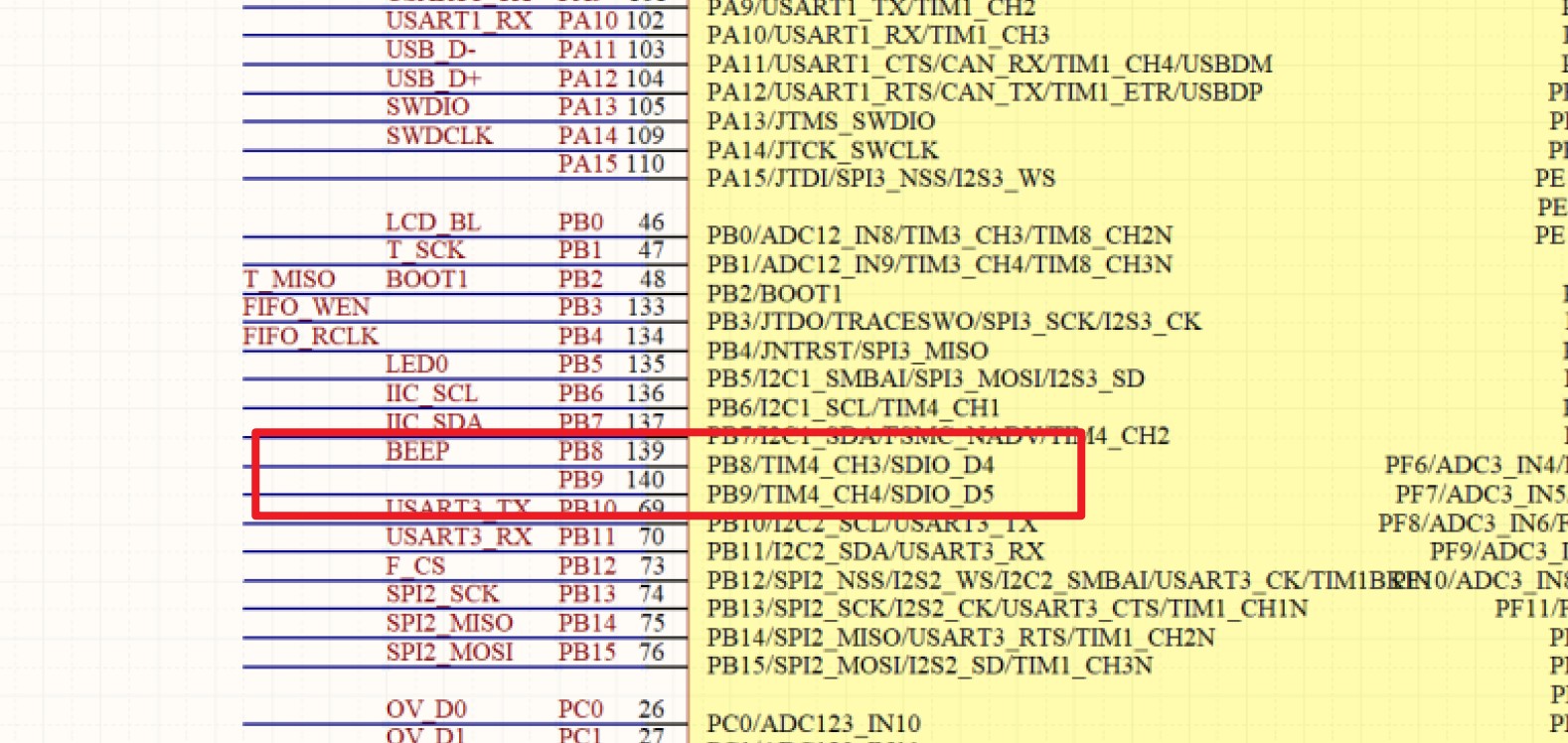
经过查阅资料,决定用PB8/9作为输出pwm的端口
控制程序如下:
//PWM 部分初始化
//arr:自动重装值
//psc:时钟预分频数
void Motor_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_Remap_TIM4, ENABLE); //Timer4重映射 TIM4_CH3->PB8 TIM4_CH4->PB9
//设置该引脚为复用输出功能,输出TIM_CH1和TIM_CH2和的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9; //TIM_CH3和TIM_CH4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM4 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC3Init(TIM4, &TIM_OCInitStructure); //初始化外设TIM4 OC3
TIM_OC4Init(TIM4, &TIM_OCInitStructure); //初始化外设TIM4 OC4
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器
TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR2上的预装载寄存器
TIM_Cmd(TIM4, ENABLE); //使能TIM4
}
接线图如下:
示例程序如下:
#include "delay.h"
#include "l298n.h"
int main(void)
{
delay_init(); //延时函数初始化
Motor_Init();
Motor_PWM_Init(899,0);
/*
定时器从0开始计数到899,共900次计数,即自动重载值为900
不分频。PWM频率=72000000/900=80Khz
*/
TIM_SetCompare3(TIM4,400); //TIM4 通道3 用400作为区分高低的线
TIM_SetCompare4(TIM4,400); //TIM4 通道4 用400作为区分高低的线
while(1)
{
Motor_Forward();
delay_ms(1500);
Motor_Stop();
delay_ms(1500);
Motor_Backward();
delay_ms(3000);
}
}
如果要改输出pwm的端口的话,必须看清楚程序的通道和定时器标号
效果如下:
视频地址(bilibili)
用STM32玩L298N(正反转、调速)的更多相关文章
- 玩转X-CTR100 l STM32F4 l TB6612直流电机调速控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的直流调速电机控制,X ...
- PWM是如何调节直流电机转速的?电机正反转的原理又是怎样的?
电机是重要的执行机构,可以将电转转化为机械能,从而驱动北控设备的转动或者移动,在我们的生活中应用非常广泛.例如,应用在电动工具.电动平衡车.电动园林工具.儿童玩具中.直流电机的实物图如下图所示. 1- ...
- [问题解决]不使用PWM调速系统,彻底解决一个L298N带动两个电机却转速不同的问题
问题描述:由单片机的VCC引脚供电,使用L298N控制两个电机,发现左右两个轮子的转速老是不一样,更多的情况是左轮转速高(左轮电机接OUT1和OUT2),右轮转速低(右轮电机接OUT3和OUT4)甚至 ...
- 过渡与动画 - 缓动效果&基于贝塞尔曲线的调速函数
难题 给过渡和动画加上缓动效果是一种常见的手法(比如具有回弹效果的过渡过程)是一种流行的表现手法,可以让界面显得更加生动和真实:在现实世界中,物体A点到B点往往也是不完全匀速的 以纯技术的角度来看,回 ...
- 用STM32玩OLED(显示文字、图片、动图gif等)
目录 用STM32玩OLED(显示文字.图片.动图gif等) 1. 显示字符串 2. 显示中文 3. 显示图片 4. 显示动图 5. 总结测试 用STM32玩OLED(显示文字.图片.动图gif等) ...
- 直流调速系统Modelica基本模型
为了便于在OpenModelica进行仿真,形成一个完整的仿真模型,没有使用第三方的库,参照了DrModelica的例程,按照Modelica库的开源模型定义了所用的基本元件模型. 首先给出一些基本类 ...
- 过渡与动画 - steps调速函数&CSS值与单位之ch
写在前面 上一篇中我们熟悉五种内置的缓动曲线和(三次)贝塞尔曲线,并且基于此完成了缓动效果. 但是如果我们想要实现逐帧动画,基于贝塞尔曲线的调速函数就显得有些无能为力了,因为我们并不需要帧与帧之间的过 ...
- PLECS_晶闸管调速系统_9w
3. 直流电机开环调压调速系统模型搭建 (1)电路图 (2)仿真 当 α = pi / 2.7 的时候,直流电机的稳定转速大约保持很低的速度. 随着α的减少,直流电机的速度逐渐增大.当α = pi / ...
- 过渡与动画 - 逐帧动画&steps调速函数
写在前面 上一篇中我们熟悉五种内置的缓动曲线和(三次)贝塞尔曲线,并且基于此完成了缓动效果. 但是如果我们想要实现逐帧动画,基于贝塞尔曲线的调速函数就显得有些无能为力了,因为我们并不需要帧与帧之间的过 ...
随机推荐
- eclipse/myeclipse注释模板的修改
本文转自:http://kaminlee.iteye.com/blog/1101938 Window --> Java --> Code Style --> Code Templat ...
- 微信小程序拖动列表功能
WXML部分 1 <view class="index"> 2 3 <!-- 数据展示区 --> 4 <scroll-view 5 class=&qu ...
- 数组 indexOf()
众所周知,indexOf()这个方法经常出现在字符串的使用中,也许是用来寻找字符串中某一字符在字符串中的位置,或者也可以用来寻找字符串中重复出现的字符有哪些.对于刚接触 JS 的我们来说,在对数组的操 ...
- Uncaught TypeError: document.getElementsById is not a function
今天博主终于开始攻关javascript(俗称js)了,不过要注意了,它和java可是一丁点关系都没有,就像老婆饼和老婆一样. 下面就让我们来讨论一下博主这次犯下的低级错误吧 一.背景(解决方法在文末 ...
- FastAPI(七十三)实战开发《在线课程学习系统》接口开发-- 回复留言
之前文章分享FastAPI(七十二)实战开发<在线课程学习系统>接口开发-- 留言列表开发,这次我们分享如何回复留言 按照惯例,我们还是去分析这里面的逻辑. 1.判断用户是否登录 2.用户 ...
- Struts2-EL表达式为什么能获取值栈数据
1.EL表达式能获取域对象值 2.向域对象里面放值使用setAttribute方法,获取使用getAttribute方法 3.底层增强request对象里面的方法getAttribute方法 (1)首 ...
- 前台js发请求参数与后台接参数的问题
js函数中写参数,ajax中写参数,示例如下: function informationQuery(sign){//预警详情条件查询 $.get("/detail/informationQu ...
- Oracle双字段约束
Oracle里有unique约束,意思是该字段唯一. 但如果是两个字段呢? 比如说一个会员等级表 ID NAME POINT DISCOUNT PRIVILEGE MID 1019 普通会员 0 10 ...
- redis 知识点收集 注意理解底层
学redis,首先要明白其特性,其次要理解明白redis与操作系统底层的关系,这点很重要.这是一个优秀的学习方法,作为计算机专业,应当时刻想着技术和操作系统计算机组成数据结构的联系,听起来有些书生气死 ...
- [译]ng指令中的compile与link函数解析 转
通常大家在使用ng中的指令的时候,用的链接函数最多的是link属性,下面这篇文章将告诉大家complie,pre-link,post-link的用法与区别. 原文地址 angularjs里的指令非常神 ...