SLAM+语音机器人DIY系列:(三)感知与大脑——1.ydlidar-x4激光雷达
摘要
在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光雷达、IMU、轮式里程计、麦克风、音响、摄像头,和用于处理信息的嵌入式主板。关于传感器的ROS驱动程序开发和在机器人上的使用在后面的章节会展开,本章节重点对机器人传感器和嵌入式主板进行讲解,主要内容:
1.ydlidar-x4激光雷达
在移动机器人中,获取机器人周围障碍物和环境的轮廓形状是非常重要的。使用激光雷达正是为了实现这个目的。利用扫描得到的障碍物信息,机器人就可以利用SLAM建立地图、并进行避障和自主导航。考虑到成本,推荐大家选用低成本的2D激光雷达,这里推荐的ydlidar-x4激光雷达正是一款极低成本的2D激光雷达,作为学习性能足够用了。
1.1.硬件概述

(图1)ydlidar-x4激光雷达实物
雷达主体由激光测距模组和电机构成,雷达主体需要连接转接板,用于实现外部供电和UART转USB,如图1。

(图2)ydlidar-x4激光雷达性能参数
测距频率是指每秒钟测距的次数(即激光测距模组的采样率),测距频率默认为5KHz;扫描频率是指电机每秒钟转过的圈数,扫描频率默认为8Hz;测距范围是指落在此距离范围的障碍物才能被测量,测距范围为0.12~10m;扫描角度为0~360度,也就是能够360度全方位扫描;测距分辨率就是测距精度;角度分辨率就是两个相邻扫描点之间的夹角。ydlidar-x4激光雷达性能参数,如图2。
关于激光雷达的性能参数对SLAM建图与避障导航的影响,这里做一个简短的分析。
扫描频率:
扫描频率越高,电机转动一圈的时间约短,扫描获取1帧雷达数据的时间越短,这样可以使SLAM建图和避障导航实时性更好。简单点说就是机器人运动速度很快时,扫描到的点云数据连续性也比较好,这有利于SLAM算法建立稳定的地图,有利于避障导航算法及时发现并避开障碍物。
测距范围:
小于测距范围最小值的区域就是雷达的测量盲区,处于盲区中的障碍物无法被探测,所以,盲区当然是越小越好以保证机器人不发生碰撞;大于测距范围最大值的区域就是雷达超量程的区域,在超量程的区域的障碍物无法被探测或者可以探测但误差很大,所以,在比较开阔的环境下应该采用远距离量程的雷达。
扫描角度:
大部分雷达都是0~360度全方位扫描的,所以就没什么太大的区别了,其实就是机器人不用转动身体的情况下就能一次性扫描出四周的障碍物信息。
测距分辨率:
测距分辨率也就是测距精度,测距精度越高当然有利于SLAM建图和避障导航,但是测距精度越越高的雷达成本当然也越高,现在国产低成本的雷达普遍为厘米级(cm)的精度,差一点的雷达5cm左右的精度,稍微好一点的雷达2cm左右的精度,如果要达到毫米级(mm)的精度成本就非常高了。
角度分辨率:
角度分辨率决定了两个相邻点云之间的夹角,由于雷达是通过旋转进行扫描的,随着距离增加点云会越来越稀疏。如果角度分辨率比较低,在扫描远距离物理时只能得到非常稀疏的几个点云,这样的点云基本上没有什么用处了。
角度分辨率 = 360 /(测距频率 / 扫描频率)
从上面的角度分辨率计算公式来看,一般测距频率为常数值(由激光模组特性决定),那么通过降低扫描频率可以提升角度分辨率,但同时扫描频率降低会影响雷达的实时性,所以这是一个权衡的过程,根据实际情况做选择。
1.2.工作原理
激光雷达之所以流行,得益于它能够精确的测距。主流的激光雷达基于两种原理:一种是三角测距法,另一种是飞行时间(TOF)测距法。其实很好理解,就是利用了最基本的数学与物理知识。
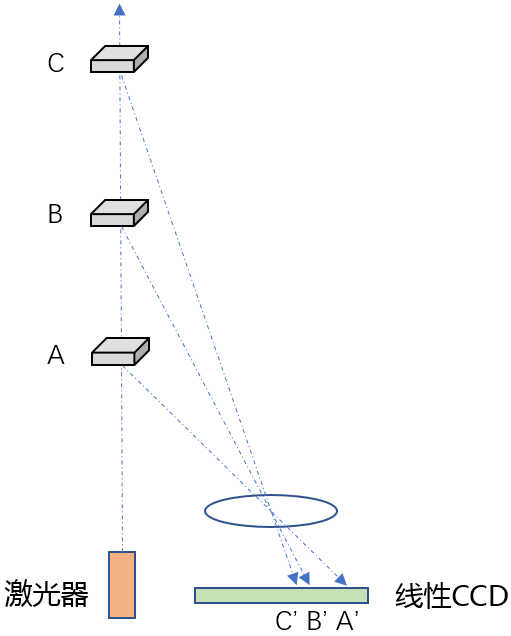
(图3)三角测距原理
三角测距原理如图3,激光器发射一束激光,被物体A反射后,照射到图像传感器的A’,这样就形成了一个三角形,通过解算可以求出物体A到激光器的距离。激光束被不同距离的物体反射后,形成不同的三角形。我们不难发现随物体距离不断变远,反射激光在图像传感器上的位置变化会越来越小,也就是越来越难以分辨。这正是三角测距的一大缺点,物体距离越远,测距误差越大。
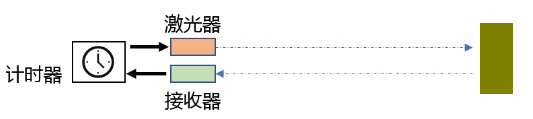
(图4)TOF测距原理
飞行时间(TOF)测距原理如图4,激光器发出激光时,计时器开始计时,接收器接收到反射回来的激光时,计时器停止计时,得到激光传播的时间后,通过光速一定这个条件,很容易计算出激光器到障碍物的距离。由于光速传播太快了,要获取精确的传播时间太难了。所以这种激光雷达自然而然成本也会高很多,但是测距精度很高。
1.3.在机器人中使用ydlidar-x4激光雷达

(图5)在机器人中使用ydlidar-x4激光雷达
ydlidar-x4激光雷达通过串口与机器人相连接,机器人中通过运行雷达ROS驱动,来实现读取串口的雷达数据和将雷达数据发布到/scan这个主题,这样机器人上的其它节点就可以通过订阅/scan主题来获取激光雷达数据了。关于雷达ROS驱动在机器人上的具体使用,将在后面的章节中具体讲解。
后记
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
----------------文章将持续更新,敬请关注-----------------
如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

SLAM+语音机器人DIY系列:(三)感知与大脑——1.ydlidar-x4激光雷达的更多相关文章
- SLAM+语音机器人DIY系列:(三)感知与大脑——2.带自校准九轴数据融合IMU惯性传感器
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——3.轮式里程计与运动控制
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——4.音响麦克风与摄像头
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——5.机器人大脑嵌入式主板性能对比
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——6.做一个能走路和对话的机器人
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——6.编写简单的service和client
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——4.底盘ROS驱动开发
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
随机推荐
- [Noi2016]区间 BZOJ4653 洛谷P1712 Loj#2086
额... 首先,看到这道题,第一想法就是二分答案+线段树... 兴高采烈的认为我一定能AC,之后发现n是500000... nlog^2=80%,亲测可过... 由于答案是求满足题意的最大长度-最小长 ...
- DNS Server Centos 7
1.安裝服務 #yum update –y #yum install bind –y #systemctl start named 開啟服務named #systemctl ...
- WebGL three.js学习笔记 使用粒子系统模拟时空隧道(虫洞)
WebGL three.js学习笔记 使用粒子系统模拟时空隧道 本例的运行结果如图: 时空隧道demo演示 Demo地址:https://nsytsqdtn.github.io/demo/sprite ...
- 如何看MySql执行计划explain(或desc)
简介 MySQL 提供了一个 EXPLAIN 命令, 它可以对 SELECT 语句进行分析, 并输出 SELECT 执行的详细信息, 以供开发人员针对性优化.EXPLAIN 命令用法十分简单, 在 S ...
- LeetCode算法题-Subdomain Visit Count(Java实现)
这是悦乐书的第320次更新,第341篇原创 01 看题和准备 今天介绍的是LeetCode算法题中Easy级别的第189题(顺位题号是811).像"discuss.leetcode.com& ...
- 简单Java类 全网最详细讲解 !!!
最近学习java非常吃力,学习的进度很快,由于基础没打牢固,整体上项目理解很吃力,偶尔会遇到一些基本的概念,都会阻碍整体的理解.最近也看了不少的视频讲解,听得很迷,最后搞得很乱,没有明确的学习目标,今 ...
- 使用拷贝的方式(adb push) 绕过Android系统和adb install直接安装APK
某些情况下定制的Android系统为了限制用户安装应用,例如电视盒子,车载中控等,通过修改代码屏蔽了正常安装应用的方式 本文探讨如何在 adb shell 具有读写data分区目录的权限前提下,通过a ...
- Git思维导图
EBay全程问了我关于Git的原理, 各种命令行:平常依赖Idea的图形化太严重了,今天仔细总结一下常用的工具: Git学习的链接: https://book.git-scm.com/ http: ...
- LeetCode算法题-Minimum Distance Between BST Nodes(Java实现-四种解法)
这是悦乐书的第314次更新,第335篇原创 01 看题和准备 今天介绍的是LeetCode算法题中Easy级别的第183题(顺位题号是783).给定具有根节点值的二叉搜索树(BST),返回树中任何两个 ...
- 有人WIFI模块使用详解
补充 模块在连接路由器时如果希望模块固定IP 不过发现固定IP之后好像连接路由器的等待时间增加了 用的这一款 看一下现在可能用到了引脚 这个模块也有三种模式AP,STA,AP+STA 先说一下模块在A ...