PCL—低层次视觉—点云分割(基于形态学)
1.航空测量与点云的形态学
航空测量是对地形地貌进行测量的一种高效手段。生成地形三维形貌一直是地球学,测量学的研究重点。但对于城市,森林,等独特地形来说,航空测量会受到影响。因为土地表面的树,地面上的房子都认为的改变了地貌,可以认为是地貌上的噪声点。设计一种有效的手段去除地面噪声对地形测量的影响显得非常重要。这种工作可以认为是一种特殊的点云分割,一般情况下点云分割的目标是去除地面,而这种方法需要在不使用地面平整假设的前提下获得地面。
形态学是图像处理中非常重要的概念,对二值图像而言,可由简单的膨胀运算和腐蚀运算组成一个完整的图像处理族。但是想要将这个算法移植到三维点云上是比较难的,首先一般的点云没有明显的映射值,也没有清晰的定义域,很难设计形态学处理的基理。但是LIDAR点云例外。由于LIDAR点云由飞机获得,飞机距离地面相对较远,且测量方向和地面垂直。这就形成了比较完整的xy->z映射(z方向的范围远远小于xy方向),z方向代表地面物体的高度,x,y方向为平行与地面且相互垂直的两个轴。有了明确的定义域以及单值映射关系就有了设计形态学算法的基本要素。实际上除了形态学算法之外,许多图像处理算法都可以用来分割LIDAR点云了,本质上这就是一幅大图像。
2.三维形态学算子
对于图像而言,形态学运算一般是针对二值图像而言的。当然也有针对灰度的形态学运算,其原理应该和针对点云的形态学运算类似(我猜的)。形态学算子的设计实际上非常简单,只要能设计出基础的膨胀和腐蚀算子就可以组合得到一系列的处理。
其中,d表示膨胀算子,e表示腐蚀算子。算子的原理有些像中值滤波,通过选取一个窗w中最高点或最低点来完成图像的膨胀和腐蚀,其效果如下图所示:
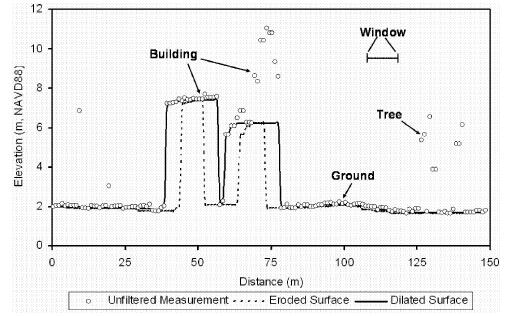
在航拍图的横截面上可以很清楚的看出膨胀与腐蚀的效果。对于房子和树可以用不同尺度窗(从小到大)先腐蚀至地面。但是这会导致一个巨大的问题。。。如果地面上有个土包(比如秦始皇陵),那么这个土包也会在一次次的腐蚀中被消耗。那岂不是秦始皇陵就发现不了?所以还有一个补偿算法用于解决这个问题,称为线性补偿算法。
建筑物和土包有一个巨大的区别,建筑物往往相对比较陡峭,而土包却是变化比较平缓的。这个可以作为一个判据,用于判断物体是否需要被腐蚀,也作为窗收敛的判据。
式中k称为斜率,代表下一个窗的大小是上一个窗的2^k倍
s是一个因子

dh是切深判据,每一次腐蚀大于切深判据才认为是有效的,小于切深判据则是土包。
上述公式是怎么发现的就需要问论文作者了,所有材料都被收录于文章:
A Progressive Morphological Filter for Removing Nonground Measurements From Airborne LIDAR Data
3.PCL对本算法的实现
//生成形态滤波器
pcl::ProgressiveMorphologicalFilter<pcl::PointXYZ> pmf;
pmf.setInputCloud (cloud);
//设置窗的大小以及切深,斜率信息
pmf.setMaxWindowSize ();
pmf.setSlope (1.0f);
pmf.setInitialDistance (0.5f);
pmf.setMaxDistance (3.0f);
//提取地面
pmf.extract (ground->indices); // 从标号到点云
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud (cloud);
extract.setIndices (ground);
extract.filter (*cloud_filtered);
算法效果如图:

PCL—低层次视觉—点云分割(基于形态学)的更多相关文章
- PCL—低层次视觉—点云分割(邻近信息)
分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最简单的分割方式就是在边界上找些居民问:"小伙子,你到底能不能上油管啊?”.然后把能上油管的居民坐标 ...
- PCL—低层次视觉—点云分割(RanSaC)
点云分割 点云分割可谓点云处理的精髓,也是三维图像相对二维图像最大优势的体现.不过多插一句,自Niloy J Mitra教授的Global contrast based salient region ...
- PCL—低层次视觉—点云分割(基于凹凸性)
1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割算法是实现复杂功能的基础.但是大家搞了几十年也还没搞定——不是我说的,是接下来要介绍的这篇论文说的.图像分割 ...
- PCL—低层次视觉—点云分割(超体聚类)
1.超体聚类——一种来自图像的分割方法 超体(supervoxel)是一种集合,集合的元素是“体”.与体素滤波器中的体类似,其本质是一个个的小方块.与之前提到的所有分割手段不同,超体聚类的目的并不是分 ...
- PCL—低层次视觉—点云分割(最小割算法)
1.点云分割的精度 在之前的两个章节里介绍了基于采样一致的点云分割和基于临近搜索的点云分割算法.基于采样一致的点云分割算法显然是意识流的,它只能割出大概的点云(可能是杯子的一部分,但杯把儿肯定没分割出 ...
- PCL—低层次视觉—点云滤波(基于点云频率)
1.点云的频率 今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概念.但这个概念并未在文献中出现也未被使用,谨在本博文中滥用一下“高频”一词.点云表达的是三维空间中的一种信息 ...
- PCL—低层次视觉—点云滤波(初步处理)
点云滤波的概念 点云滤波是点云处理的基本步骤,也是进行 high level 三维图像处理之前必须要进行的预处理.其作用类似于信号处理中的滤波,但实现手段却和信号处理不一样.我认为原因有以下几个方面: ...
- PCL—低层次视觉—关键点检测(rangeImage)
关键点又称为感兴趣的点,是低层次视觉通往高层次视觉的捷径,抑或是高层次感知对低层次处理手段的妥协. ——三维视觉关键点检测 1.关键点,线,面 关键点=特征点: 关键线=边缘: 关键面=foregro ...
- PCL—低层次视觉—关键点检测(NARF)
关键点检测本质上来说,并不是一个独立的部分,它往往和特征描述联系在一起,再将特征描述和识别.寻物联系在一起.关键点检测可以说是通往高层次视觉的重要基础.但本章节仅在低层次视觉上讨论点云处理问题,故所有 ...
随机推荐
- Python线性时间排序——桶排序、基数排序与计数排序
1. 桶排序 1.1 范围为1-M的桶排序 如果有一个数组A,包含N个整数,值从1到M,我们可以得到一种非常快速的排序,桶排序(bucket sort).留置一个数组S,里面含有M个桶,初始化为0.然 ...
- Jquery LigerUI框架学习(一)
ligerUI框架是一个很丰富的后台框架模板,具有简洁大方的后台样式框架,还有很多灵活的控件,方便开发人员使用: 把昨天学习的成功拿出来供大家学习学习: 首先我们要去ligerUI官网下载Jquery ...
- C# 枚举,传入int值返回string值
需求:1:子公司负责人2:人事3:审批人4:签批人 5:管理员 传入值为1,2,3,4,5这个数字的某一个.需要返回他们的中文描述. 一下忘记该怎么写了...后来百度下查出来了..记录下当个小工具吧 ...
- R语言基础(一) 可视化基础
##数据获取 x1=round(runif(100,min=80,max=100)) x2=round(rnorm(100,mean=80, sd=7)) x3=round(rnorm(100,mea ...
- Linux 配置本地yum源
Linux 配置无网络状态利用yum安装软件 在有网络的情况下安装软件只需一条yum install xxx命令,例如安装gcc只需一条指令:yum install gcc 那么在没有网络的情况下该 ...
- getHeight returns 0 for all Android UI objects
It's 0 because in both onCreate and onStart, the view hasn't actually been drawn yet. You can get ar ...
- Java 8 VM GC Tunning Guide Charter 5
第5章 Available GC The Java HotSpot VM includes three different types of collectors, each with differe ...
- listview中getview异步加载网络图片
前言:本以为异步加载挺简单,因为网上代码多,但真想要做好,还真不那么简单,从看代码到弄懂再到自己写,实在是有太多的东西需要学了,用了两天的时间,终于弄出来了,因为用到回调函数,所以理解起来可能难度有点 ...
- C# Winform 拖放操作
http://www.cnblogs.com/imlions/p/3189773.html 在开发程序的时候,为了提高用户的使用体验,或满足相关用户的功能,总是离不开拖放功能.而本文是总结winfor ...
- angular 服务
在Angular里面,services作为单例对象在需要到的时候被创建,只有在应用生命周期结束的时候(关闭浏览器)才会被清除.而controllers在不需要的时候就会被销毁了.服务用于在控制器之间进 ...